TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025031561
公報種別
公開特許公報(A)
公開日
2025-03-07
出願番号
2024111412
出願日
2024-07-11
発明の名称
コンクリート状態の多元時系列モニタリングデータの補完方法
出願人
中国長江電力股ふん有限公司
,
河海大学
代理人
個人
,
個人
,
個人
,
個人
主分類
E02B
7/02 20060101AFI20250228BHJP(水工;基礎;土砂の移送)
要約
【課題】コンクリート状態の多元時系列モニタリングデータの補完方法
【解決手段】収集された多元生データに対してBox-Cox変換を行うステップと、Box-Cox変換後の多元時系列データで行列D
n,m
を構成し、且つ行列D
n,m
の列を切断した後に再構成操作を行い、再構成後の新たな行列を、P
n,m*n′
とするステップと、再構成後の行列P
n,m*n′
中の欠損値を予測し、欠損値を補完し、補完後の行列から行列D
n,m
を抽出するステップと、抽出された行列D
n,m
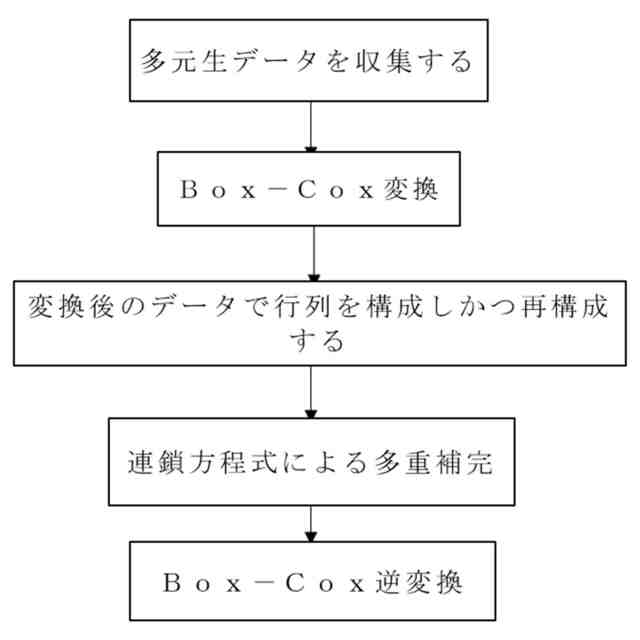
中のデータに対して逆変換を行うステップとを含む。本発明は、生データに対して、それが正規分布に従うようにBox-Cox変換を行い、変換後のデータをシーケンス行列に組織し、行列の列を分割することで行列を再構成し、連鎖方程式による多重補完法を用いて再構成行列の欠損値を充填し、多元時系列モニタリングデータの補完を実現する。
【選択図】図1
特許請求の範囲
【請求項1】
コンクリート自動化モニタリングシステムが収集した多元生データに対して、それが正規分布に従うように、Box-Cox変換を行うステップS1と、
Box-Cox変換後の多元時系列データで行列D
n,m
を構成し、行列D
n,m
の列を切断して再構成操作を行い、再構成後の新たな行列を、P
n,m*n′
とするステップS2と、
再構成後の行列P
n,m*n′
中の欠損値を予測し、欠損値を補完し、補完後の行列から行列D
n,m
を抽出するステップS3と、
抽出された行列D
n,m
におけるデータに対して逆変換を行うことにより、データと観測データとを同一桁にし、最終的に多元時系列データの補完を実現するステップS4と、を含み、
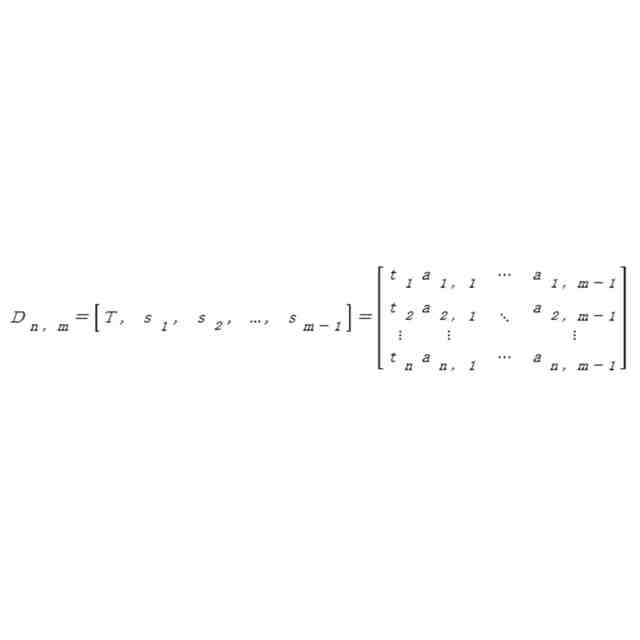
前記ステップS2の具体的な過程は、
Box-Cox変換後の多元時系列データで行列D
n,m
を構成するステップS2-1であって、行列の各行は、タイムスタンプ上のデータ記録を表し、行列D
n,m
は、
JPEG
2025031561000034.jpg
22
114
で表され、
ここで、第1の列は、タイムスタンプであり、残りの列、すなわち、s
1
,s
2
,…,s
m-1
は、変数である、ステップS2-1と、
行列D
n,m
の各列を長さが同一のn′個の短い列ブロックに分割するステップS2-2であって、n′は、自己相関値に基づいて計算され、分割後の行列は、
JPEG
2025031561000035.jpg
21
127
で表され、
再構成後の行列は、D′
n/n′,m*n′
=[T
1
,T
2
,…,T
n′
,s
11
,s
12
,…,s
1n′
,…,s
(m-1)1
,s
(m-1)2
,…,s
(m-1)n′
]である、ステップS2-2と、
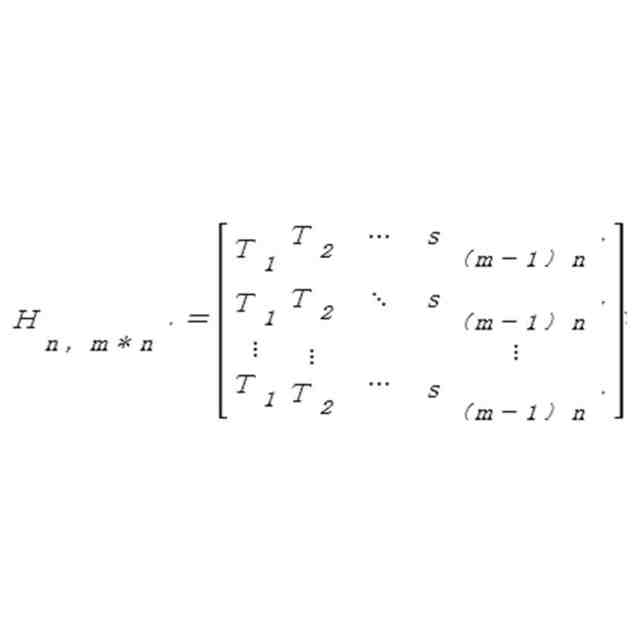
再構成後の行列D′
n/n′,m*n′
をn′回複製し、次にn′個の行列D
n/n′,m*n′
を垂直に組み合わせて遅延シーケンス行列
JPEG
2025031561000036.jpg
40
103
を形成するステップS2-3と、
遅延シーケンス行列H
n,m*n′
を行ごとに行列D
n,m
の後にスプライシングし、遅延行列の各行における繰り返し要素を削除し、新たな遅延シーケンス行列をH′
n,m*(n′-1)
とし、行列D
n,m
と新たな遅延シーケンス行列とによって新たな行列P
n,m*n′
=[D
n,m
,H′
n,m*(n′-1)
]を構成するステップS2-4と、である、ことを特徴とするコンクリート状態の多元時系列モニタリングデータの補完方法。
続きを表示(約 2,400 文字)
【請求項2】
前記ステップS1における多元生データは、温度、pH値、抵抗率、塩素イオン濃度、カルシウムイオン濃度、浸透流を含む、ことを特徴とする請求項1に記載のコンクリート状態の多元時系列モニタリングデータの補完方法。
【請求項3】
前記ステップS1の具体的な過程は、
コンクリート自動化モニタリングシステムから多元生データを収集するステップS1-1と、
収集された多元生データに対して、それが正規分布に従うようにBox-Cox変換を行い、変数の時系列次元の回帰特性を保証するステップS1-2であって、その式は、
JPEG
2025031561000037.jpg
21
127
であり、
ここで、x
λ
i
は、生データであり、a
i
は、変換後のデータであり、nは、データ数であり、λは、変換係数であり、データシーケンス自体によって決定される、ステップS1-2と、
最尤推定を用いてパラメータλの値を推定し、尤度関数L(λ)を確立するステップS1-3であって、その式は、
JPEG
2025031561000038.jpg
19
112
であり、
ここで、
JPEG
2025031561000039.jpg
13
70
は、aの最尤推定を表し、
JPEG
2025031561000040.jpg
11
9
は、シーケンスの平均値を表す、ステップS1-3と、である、ことを特徴とする請求項1に記載のコンクリート状態の多元時系列モニタリングデータの補完方法。
【請求項4】
前記ステップS2-2におけるn′の求解方法は、
ある行における要素が全部欠損することがあるか否かについて、行列D
n,m
の各行を観察するA1と、
存在する場合、nのすべての約数を含み、それに対応する商がオリジナル行列の列m以上であるセットSを確立するA2と、
存在しない場合、そのままA4を実行するA3と、
n′は、セットS中の要素であり、新たな列の長さn/n′は、行列D
n,m
の列の長さより大きく、すなわち、n/n′>mであり、n′は、
JPEG
2025031561000041.jpg
15
32
を満たし、ここで
JPEG
2025031561000042.jpg
9
10
がxより大きい最小整数を表し、分割後の行列の行数及び列数は、いずれもmより大きいA4と、である、ことを特徴とする請求項1に記載のコンクリート状態の多元時系列モニタリングデータの補完方法。
【請求項5】
前記ステップS3の具体的なステップは、
連鎖方程式による多重補完法を用いて再構成後の行列P中の欠損値を予測し、欠損値を補完するステップS3-1と、
新たな行列P中の欠損値が補完された後、補完後の行列から行列D
n,m
を抽出するステップS3-2と、である、ことを特徴とする請求項1に記載のコンクリート状態の多元時系列モニタリングデータの補完方法。
【請求項6】
前記ステップS3-1における連鎖方程式アルゴリズムの具体的なステップは、
行列中の欠損値を推定するステップB1と、
順に1つの変数を選択し、且つその推定値を削除し、削除された推定値の変数を補完モデルの従属変数とし、残りをモデルの独立変数とし、従属変数の特徴に基づいて補完モデルを選択して欠損値を予測するステップB2と、
行列のデータ列を充填し、補完結果で前の推定値を置き換えるステップB3と、
欠損値を含む変数毎に対して、欠損値がいずれも置き換えられるまでB2-B3のステップを繰り返すステップB4と、
補完モデルが収束するまで複数回反復トレーニングするステップB5と、である、ことを特徴とする請求項5に記載のコンクリート状態の多元時系列モニタリングデータの補完方法。
【請求項7】
前記ステップB1において行列中の欠損値を推定する方法は、収集されたデータの平均値で変数中の欠損値を置き換えることである、ことを特徴とする請求項6に記載のコンクリート状態の多元時系列モニタリングデータの補完方法。
【請求項8】
前記ステップB2における補完モデルの選択方法は、選択された列の変数のデータ特徴に基づいて補完モデルを選択し、データ間の関係が線形である場合、線形回帰モデルを選択し、線形関数をフィッティングすることで欠損値を推定し、変数データが連続的又は離散的なデータである場合、K近傍モデルを選択し、データ間の類似性に基づいて、最近傍の観測値を用いて欠損値を推定することである、ことを特徴とする請求項6に記載のコンクリート状態の多元時系列モニタリングデータの補完方法。
【請求項9】
前記ステップS4の具体的なステップは、
抽出された行列D
n,m
におけるデータに対してBox-Coxの逆変換を行うステップS4-1であって、その式は、
JPEG
2025031561000043.jpg
28
88
であり、
ここで、λは、S1-3で求めた最適解である、ステップS4-1と、
逆変換後のデータで構成される行列W
n,m
を補完後の行列とするステップS4-2と、である、ことを特徴とする請求項3に記載のコンクリート状態の多元時系列モニタリングデータの補完方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、水利水力発電分野に関し、具体的には、コンクリート状態の多元時系列モニタリングデータの補完方法に関する。
続きを表示(約 3,900 文字)
【背景技術】
【0002】
コンクリートは、非常に重要な建築材料として、応用範囲が非常に広い。高層ビルではコンクリートは、地盤を支える役割を果たす。水利分野では、水資源の開発利用に伴い、コンクリートダムは、中国全国にわたっており、コンクリートダムが正常に運転できるか否かは、水利工事のセキュリティに直接関係し、人々の生命財産の安全に影響を与える。コンクリート建築材料の建築時間の増加に伴い、コンクリートモニタリングデータに対して信頼性分析を行うことは、コンクリートの正常状態を把握することに寄与し、それによってビルの安定した安全運転を確保する。しかし、モニタリングシステムの劣化、伝送などの故障問題のため、大量のモニタリングデータの欠損は、現在のコンクリートダムの管理の課題の一つとなっている。モニタリングデータの欠損により、コンクリート状態評価の正確性を低下させる。従って、紛失した多元時系列モニタリングデータを回復することは、コンクリートビルの分析管理の重要な課題となっている。
【0003】
データ補完のキーは、欠損データと収集されたデータとの間にデータ依存性を確立することである。回帰機械学習モデルは、欠損値と他の変数との関係を学習することで欠損値を予測してもよい。しかしながら、複数の変数の全てに欠損データが存在する場合、回帰モデルを直接適用すると多変数データ補完問題を解決することができない。
【0004】
したがって、この問題を解決する新しい技術案が必要である。
【発明の概要】
【発明が解決しようとする課題】
【0005】
従来技術に存在する欠点を克服するために、コンクリート状態の多元時系列モニタリングデータの補完方法を提供し、主に、生データに対して、それが正規分布に従うようにBox-Cox変換を行い、変換後のデータをシーケンス行列に組織し、行列の列を分割することで行列を再構成し、連鎖方程式による多重補完を用いて再構成行列の欠損値を充填し、多元時系列モニタリングデータの補完を実現する。
【課題を解決するための手段】
【0006】
上記目的を実現するために、本発明は、
コンクリート自動化モニタリングシステムが収集した多元生データに対して、それが正規分布に従うように、Box-Cox変換を行うステップS1と、
Box-Cox変換後の多元時系列データで行列D
n,m
を構成し、時間情報によって多元データ間の相互依存性を強化するために且つ行列D
n,m
の列を切断して再構成操作を行い、再構成後の新たな行列をP
n,m*n′
とするステップS2と、
再構成後の行列P
n,m*n′
中の欠損値を予測し、欠損値を補完し、補完後の行列から行列D
n,m
を抽出するステップS3と、
抽出された行列D
n,m
におけるデータに対して逆変換を行うことにより、データと観測データとを同一桁にし、最終的に多元時系列データの補完を実現するステップS4と、を含むコンクリート状態の多元時系列モニタリングデータの補完方法を提供する。
【0007】
さらに、前記ステップS1における多元生データは、温度、pH値、抵抗率、塩素イオン濃度、カルシウムイオン濃度、浸透流を含む。
【0008】
さらに、前記ステップS1の具体的な過程は、
コンクリート自動化モニタリングシステムから、温度、pH値、抵抗率、塩素イオン濃度、カルシウムイオン濃度、浸透流である合計6つの変数を含む多元生データを収集するステップS1-1であって、システム測定頻度は、15分間である、ステップS1-1と、
収集された多元生データに対して、それが正規分布に従うようにBox-Cox変換を行い、変数の時系列次元の回帰特性を保証するステップS1-2であって、その式は、
JPEG
2025031561000002.jpg
21
127
であり、
ここで、x
λ
i
は、生データであり、a
i
は、変換後のデータであり、nは、データ数であり、λは、変換係数であり、データシーケンス自体によって決定される、ステップS1-2と、
最尤推定を用いてパラメータλの値を推定し、尤度関数L(λ)を確立するステップS1-3であって、その式は、
JPEG
2025031561000003.jpg
19
112
であり、
ここで、
JPEG
2025031561000004.jpg
13
70
は、aの最尤推定を表し、
JPEG
2025031561000005.jpg
11
9
は、シーケンスの平均値を表す、ステップS1-3と、である。
【0009】
さらに、前記ステップS2の具体的な過程は、
Box-Cox変換後の多元時系列データで行列D
n,m
を構成するステップS2-1であって、行列の各行は、タイムスタンプ上のデータ記録を表し、行列D
n,m
は、
JPEG
2025031561000006.jpg
22
114
で表され、
ここで、第1の列は、タイムスタンプであり、残りの列、すなわち、s
1
,s
2
,…,s
m-1
は、変数であり、mの値は、7である、ステップS2-1と、
行列における連続的な欠損要素の割合を最小化するために、行列D
n,m
の各列を長さが同一のn′個の短い列ブロックに分割するステップS2-2であって、n′は、自己相関値に基づいて計算され、分割後の行列は、
JPEG
2025031561000007.jpg
21
127
で表され、
第2列の変数1、すなわち、s
1
を例として、s
1
=[s
11
,s
12
,…,s
1n′
]
T
であり、ここで、
JPEG
2025031561000008.jpg
50
122
であり、これらの短い列ブロックが新たな列と見なされかつ水平に組み合わせられて行列を再構成することにより、行列の列関連性を保証し、再構成後の行列は、D′
n/n′,m*n′
=[T
1
,T
2
,…,T
n′
,s
11
,s
12
,…,s
1n′
,…,s
(m-1)1
,s
(m-1)2
,…,s
(m-1)n′
]である、ステップS2-2と、
時系列データにおける時間繰り返しパターンを強化するために、再構成後の行列D′
n/n′,m*n′
をn′回複製し、次にn′個の行列D
n/n′,m*n′
を垂直に組み合わせて遅延シーケンス行列
JPEG
2025031561000009.jpg
40
103
を形成するステップS2-3と、
遅延シーケンス行列H
n,m*n′
を行ごとに行列D
n,m
の後にスプライシングし、重複する観測値及び欠損値が後続の補完結果に与える影響を避けるために遅延行列の各行における繰り返し要素を削除して、新たな遅延シーケンス行列をH′
n,m*(n′-1)
とし、行列D
n,m
と新たな遅延シーケンス行列とによって新たな行列P
n,m*n′
=[D
n,m
,H′
n,m*(n′-1)
]を構成するステップS2-4と、である。
【0010】
さらに、前記ステップS2-2でのnの求解方法は、
ある行における要素が全部欠損することがあるか否かについて、行列D
n,m
の各行を観察するA1と、
存在する場合、nのすべての約数を含み、それに対応する商がオリジナル行列の列m以上であるセットSを確立するA2と、
存在しない場合、そのままA4を実行するA3と、
n′は、セットS中の要素であり、新たな列の長さn/n′は、行列D
n,m
の列の長さより大きく、すなわち、n/n′>mであり、n′は、
JPEG
2025031561000010.jpg
15
32
を満たすべきであり、ここで
JPEG
2025031561000011.jpg
9
10
がxより大きい最小整数を表し、分割後の行列の行数及び列数は、いずれもmより大きいA4と、である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社高橋監理
不同沈下修正機
19日前
株式会社エスイー
防災構造物
今日
個人
潜水式土運船と土砂降ろし方法
19日前
カナデビア株式会社
サクション基礎
19日前
株式会社大林組
建築物の基礎構造及び方法
5日前
株式会社オーイケ
擁壁および基礎ブロック
19日前
埼玉八栄工業株式会社
地盤撹拌装置
12日前
株式会社竹内製作所
作業用車両
9日前
株式会社竹内製作所
作業用車両
9日前
株式会社竹内製作所
作業用車両
5日前
株式会社加藤建設
固化材の吐出方法
今日
株式会社CSPホールディングス
杭抜き方法
5日前
株式会社本久
砂防ソイルセメント材の品質管理方法
9日前
ジャパンパイル株式会社
中空既製杭の吊り下げ装置
今日
日立建機株式会社
作業機械
5日前
日立建機株式会社
建設機械
5日前
日立建機株式会社
建設機械
5日前
日立建機株式会社
作業機械
5日前
アロン化成株式会社
排水設備用蓋
19日前
株式会社みどり工学研究所
上下動抑制埋設支柱及び埋設工法
5日前
清水建設株式会社
山留め工法及び山留め構造
5日前
株式会社ササキコーポレーション
除去作業機
6日前
株式会社ササキコーポレーション
除去作業機
6日前
株式会社大林組
地中連続壁の構築方法及び地中連続壁
13日前
株式会社ヤマックス
擁壁構造体と重力式擁壁構造体の築造方法
13日前
大和ハウス工業株式会社
振動低減地盤構造およびその構築方法
今日
個人
ミサイル阻止・破壊が有っても、短期に修復できる階段ダム装置
5日前
株式会社マキタ
回転工具用アクセサリ
5日前
上海勘測設計研究院有限公司
洋上風力発電の単杭基礎及び施工方法
5日前
大和ハウス工業株式会社
杭引き抜き治具
19日前
JFEシビル株式会社
柱と杭との接合構造
19日前
株式会社竹内製作所
リモコンユニット、及び、作業用車両
12日前
株式会社竹内製作所
リモコンユニット、及び、作業用車両
12日前
筑豊金網工業株式会社
じゃかご
9日前
大和ハウス工業株式会社
増設構造体の脚部固定構造と脚部固定方法
今日
日立建機株式会社
建設機械のバケット用ツース
5日前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ