TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025026002
公報種別
公開特許公報(A)
公開日
2025-02-21
出願番号
2023131318
出願日
2023-08-10
発明の名称
推定装置および車両制御装置
出願人
株式会社アイシン
代理人
弁理士法人酒井国際特許事務所
主分類
B60W
40/06 20120101AFI20250214BHJP(車両一般)
要約
【課題】これから車両が走行する路面であって車両に搭載されたセンサのセンシング結果が得られていない路面の状態と車両が当該路面を走行する場合の車両の挙動との少なくとも一方を推定することができる推定装置および車両制御装置を得る。
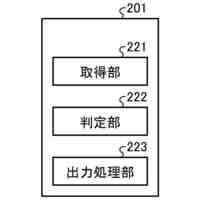
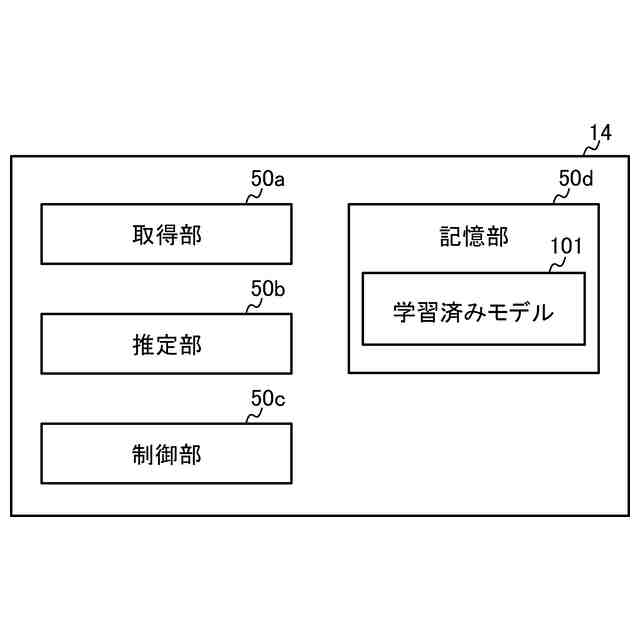
【解決手段】推定装置は、路面を走行する車両に搭載されたセンサのセンシングによって得られた車両の走行に応じた情報を取得する取得部と、情報が入力されると、センシングの結果が得られた路面よりも車両の進行方向の路面である第1の路面の状態と車両が第1の路面を走行する場合の車両の挙動との少なくとも一方を出力する学習済みモデルを利用して、情報から、第1の路面の状態と車両が前記第1の路面を走行する場合の車両の挙動との少なくとも一方を推定する推定部と、を備える。
【選択図】図4
特許請求の範囲
【請求項1】
路面を走行する車両に搭載されたセンサのセンシングによって得られた前記車両の走行に応じた情報を取得する取得部と、
前記情報が入力されると、前記センシングの結果が得られた前記路面よりも前記車両の進行方向の前記路面である第1の路面の状態と前記車両が前記第1の路面を走行する場合の前記車両の挙動との少なくとも一方を出力する学習済みモデルを利用して、前記情報から、前記第1の路面の状態と前記車両が前記第1の路面を走行する場合の前記車両の挙動との少なくとも一方を推定する推定部と、
を備える推定装置。
続きを表示(約 570 文字)
【請求項2】
前記センサは、前記車両の走行方向F1の前記路面を含む前記車両の周辺を撮像する撮像装置であり、
前記情報は、前記撮像装置の撮像によって得られた撮像画像である、
請求項1に記載の推定装置。
【請求項3】
前記第1の路面の状態は、前記第1の路面の起伏を含む、
請求項1に記載の推定装置。
【請求項4】
前記車両の挙動は、前記車両のロールと、前記車両のピッチと、前記車両のヒーブとのうちの少なくとも一つを含む、
請求項1に記載の推定装置。
【請求項5】
路面を走行する車両に搭載されたセンサのセンシングによって得られた前記車両の走行に応じた情報を取得する取得部と、
前記情報が入力されると、前記センシングの結果が得られた前記路面よりも前記車両の進行方向の前記路面である第1の路面の状態と前記車両が前記第1の路面を走行する場合の前記車両の挙動との少なくとも一方を出力する学習済みモデルを利用して、前記情報から、前記第1の路面の状態と前記車両が前記第1の路面を走行する場合の前記車両の挙動との少なくとも一方を推定する推定部と、
前記推定部による推定の結果に基づいて前記車両を制御する制御部と、
を備える車両制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、推定装置および車両制御装置に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
従来、車両が走行する路面の状態を推定する技術がある。例えば、特許文献1の技術は、上下加速度センサ等の検出結果に基づいて、路面の状態を推定する。また、車両に搭載されたセンサである撮像装置によって車両の進行方向の路面を撮像し、その撮像によって得られた撮像画像を用いて、撮像された路面の状態を推定する技術が知られている。このようにして推定された路面の状態は、例えば、車両の乗り心地や操縦安定性を高めるための車両の制御に用いられる。
【先行技術文献】
【特許文献】
【0003】
特開2008-183971号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、従来の技術では、路面の状態を推定できる路面の範囲は、車両の進行方向の路面を撮像可能な撮像装置を用いた場合であっても、撮像装置が撮像した路面までであり、撮像装置によって撮像された路面よりも車両の進行方向の路面の状態は推定できなかった。
【0005】
そこで、本発明の課題の一つは、これから車両が走行する路面であって車両に搭載されたセンサのセンシング結果が得られていない路面の状態と車両が当該路面を走行する場合の車両の挙動との少なくとも一方を推定することができる推定装置および車両制御装置を得ることである。
【課題を解決するための手段】
【0006】
本発明の実施形態の推定装置は、路面を走行する車両に搭載されたセンサのセンシングによって得られた前記車両の走行に応じた情報を取得する取得部と、前記情報が入力されると、前記センシングの結果が得られた前記路面よりも前記車両の進行方向の前記路面である第1の路面の状態と前記車両が前記第1の路面を走行する場合の前記車両の挙動との少なくとも一方を出力する学習済みモデルを利用して、前記情報から、前記第1の路面の状態と前記車両が前記第1の路面を走行する場合の前記車両の挙動との少なくとも一方を推定する推定部と、を備える。
【発明の効果】
【0007】
本発明の実施形態の推定装置によれば、これから車両が走行する路面であって車両に搭載されたセンサのセンシング結果が得られていない路面の状態と車両が当該路面を走行する場合の車両の挙動との少なくとも一方を推定することができる。
【図面の簡単な説明】
【0008】
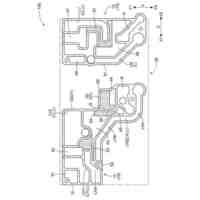
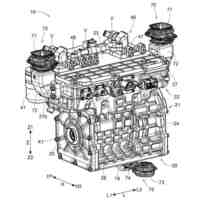
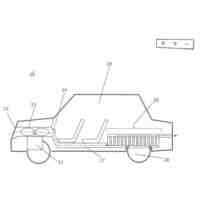
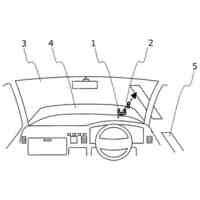
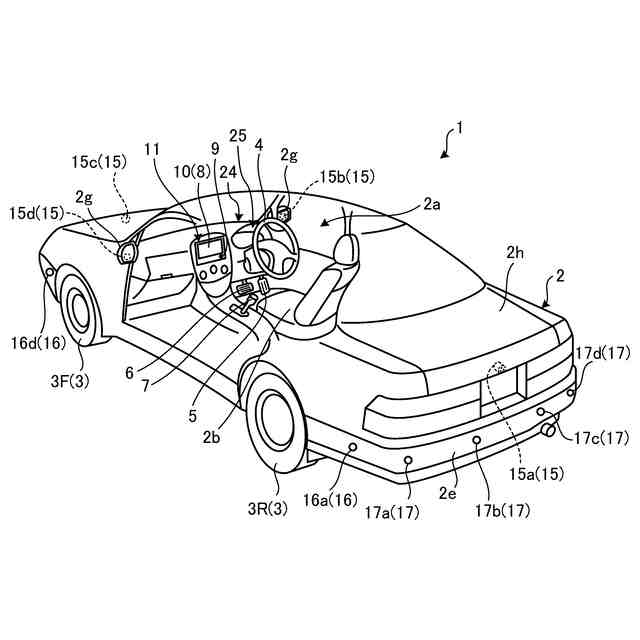
図1は、実施形態にかかる車両の車室の一部が透視された状態が示された例示的な斜視図である。
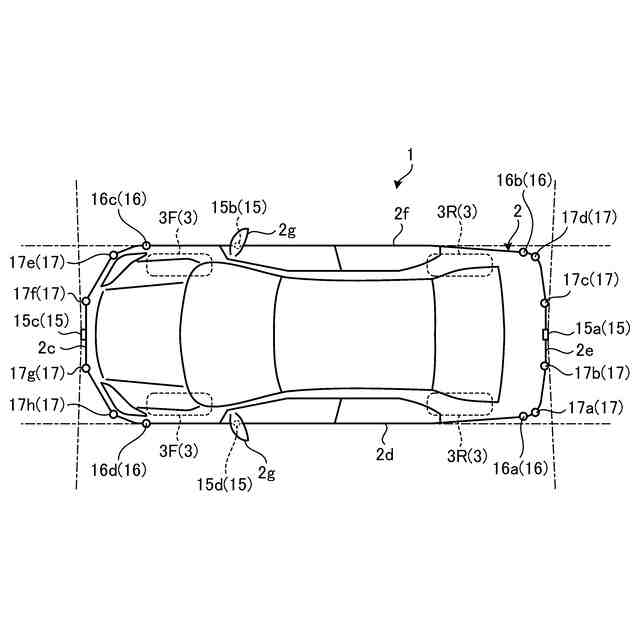
図2は、実施形態にかかる車両の例示的な平面図である。
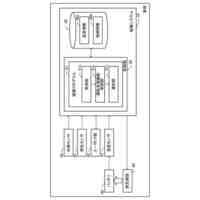
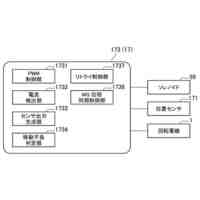
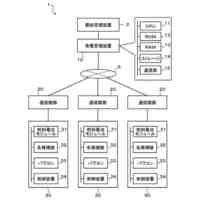
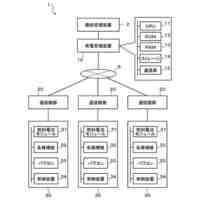
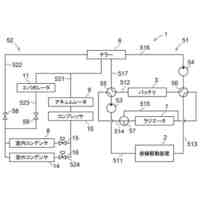
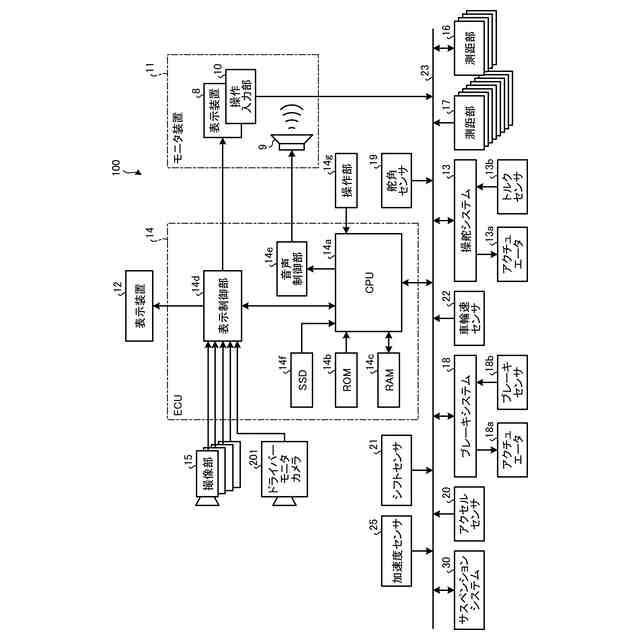
図3は、実施形態にかかる車両が有する車両制御システムの構成の例示的なブロック図である。
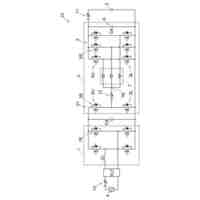
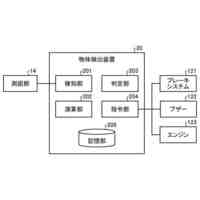
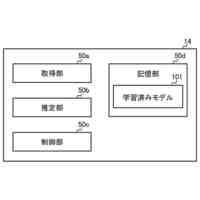
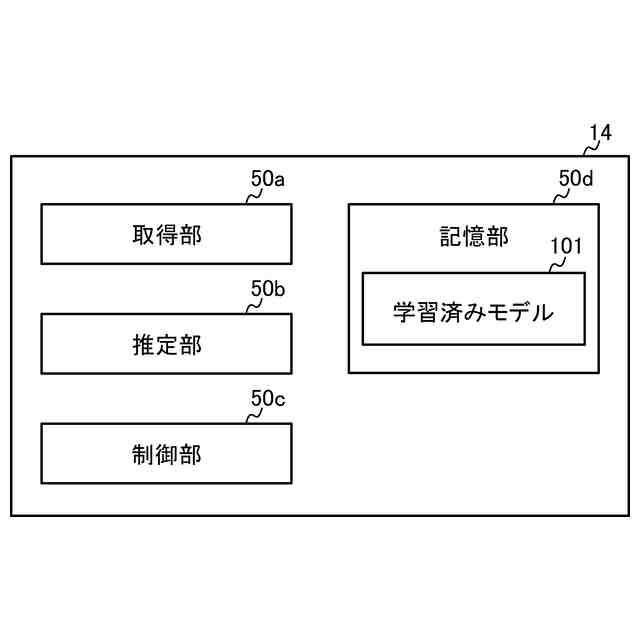
図4は、実施形態にかかる車両のECUの機能ブロック図である。
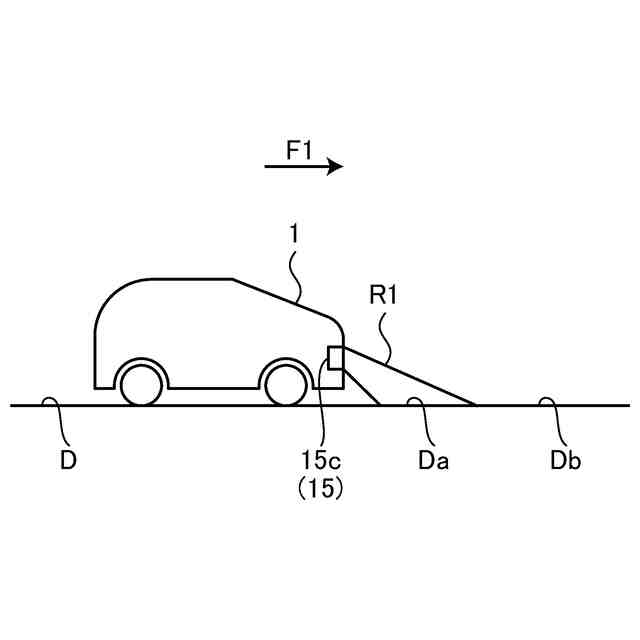
図5は、実施形態にかかる車両が路面を走行する状態を示す図である。
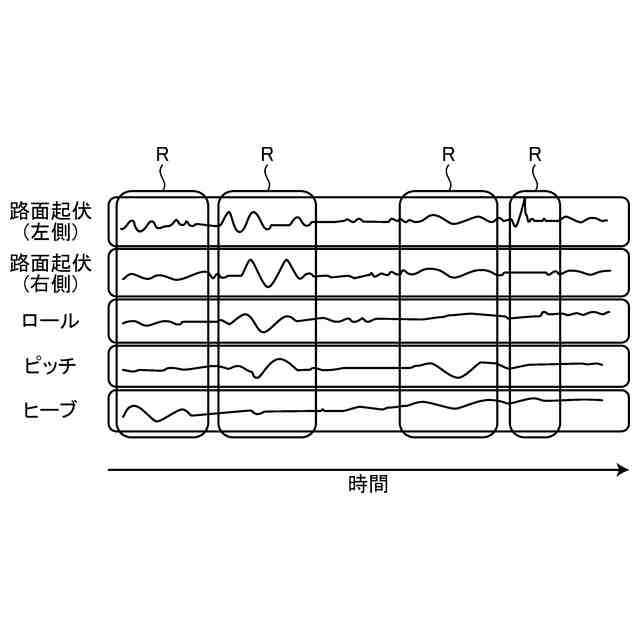
図6は、実施形態にかかる学習済みモデルを説明するための図である。
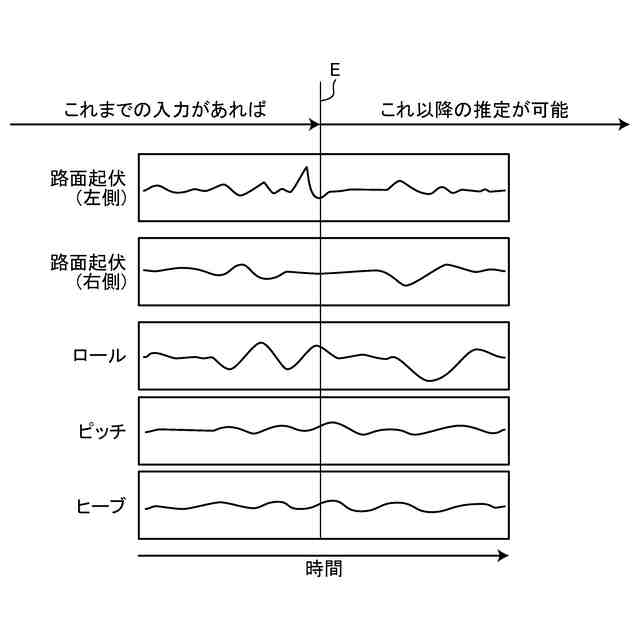
図7は、実施形態にかかる学習済みモデルを説明するための図である。
図8は、実施形態にかかるECUが実行する車両制御処理のフローチャートである。
【発明を実施するための形態】
【0009】
以下、本発明の例示的な実施形態が開示される。以下に示される実施形態の構成、ならびに当該構成によってもたらされる作用、結果、および効果は、一例である。本発明は、以下の実施形態に開示される構成以外によっても実現可能であるとともに、基本的な構成に基づく種々の効果や、派生的な効果のうち、少なくとも一つを得ることが可能である。
【0010】
本実施形態の車両1は、例えば、不図示の内燃機関を駆動源とする自動車、すなわち内燃機関自動車であってもよいし、不図示の電動機を駆動源とする自動車、すなわち電気自動車や燃料電池自動車等であってもよいし、それらの双方を駆動源とするハイブリッド自動車であってもよいし、他の駆動源を備えた自動車であってもよい。また、車両1は、種々の変速装置を搭載することができるし、内燃機関や電動機を駆動するのに必要な種々の装置、例えばシステムや部品等を搭載することができる。また、車両1における車輪3の駆動に関わる装置の方式や、数、レイアウト等は、種々に設定することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社アイシン
判定装置
2日前
株式会社アイシン
気液分離器
16日前
株式会社アイシン
暖機システム
3日前
株式会社アイシン
車両駆動装置
10日前
株式会社アイシン
発電管理装置
10日前
株式会社アイシン
発電管理装置
10日前
株式会社アイシン
マニホールド
10日前
株式会社アイシン
駐車支援装置
10日前
株式会社アイシン
車載充電装置
9日前
株式会社アイシン
車載充電装置
9日前
株式会社アイシン
物体検出装置
9日前
株式会社アイシン
直線移動機構
16日前
株式会社アイシン
情報処理装置
3日前
株式会社アイシン
車両用駆動装置
2日前
株式会社アイシン
車両用駆動装置
2日前
株式会社アイシン
車両用駆動装置
2日前
株式会社アイシン
車両用駆動装置
2日前
株式会社アイシン
水粒子送風装置
2日前
株式会社アイシン
燃料電池システム
10日前
株式会社アイシン
駐車枠取得システム
2日前
株式会社アイシン
バッテリ暖機システム
2日前
株式会社アイシン
ペロブスカイト太陽電池
16日前
株式会社アイシン
車両用駆動装置及び車両
2日前
株式会社アイシン
車両用のバッテリーケース
3日前
株式会社アイシン
固体酸化物形セルの製造方法
2日前
株式会社アイシン
推定装置および車両制御装置
2日前
株式会社アイシン
差動ギヤ機構およびその設計方法
6日前
株式会社アイシン
二酸化炭素の固定化方法及びアミノ酸水溶液
10日前
株式会社豊田中央研究所
吸着塔制御装置、ガス分離装置、複数の吸着塔の制御方法、及びコンピュータプログラム
9日前
個人
車両
3か月前
個人
飛行自動車
6日前
個人
授乳用車両
1か月前
個人
眼科手術車
1か月前
個人
自動車運転補助装置
3か月前
日本精機株式会社
表示装置
23日前
井関農機株式会社
作業車両
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ