TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025024872
公報種別
公開特許公報(A)
公開日
2025-02-21
出願番号
2023129218
出願日
2023-08-08
発明の名称
車載用制御装置
出願人
トヨタ自動車株式会社
代理人
弁理士法人アイテック国際特許事務所
主分類
B60W
30/14 20060101AFI20250214BHJP(車両一般)
要約
【課題】車間時間と自車速との車間関係をより適正に学習する。
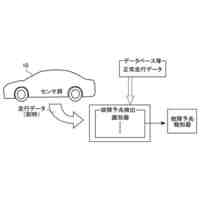
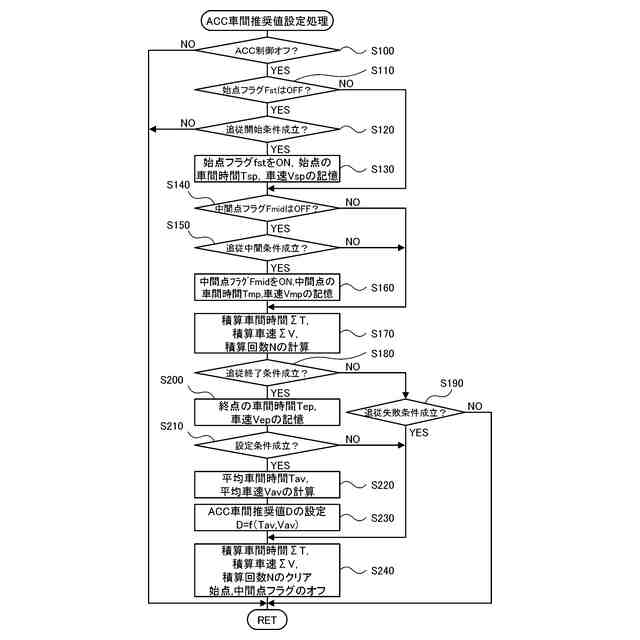
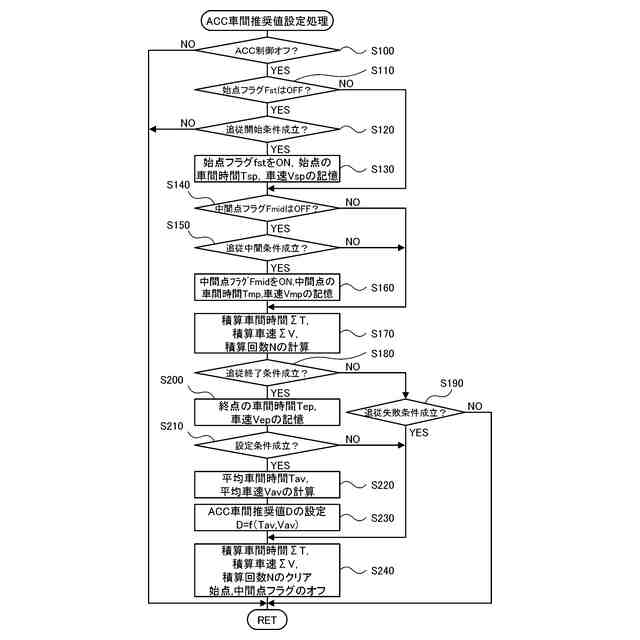
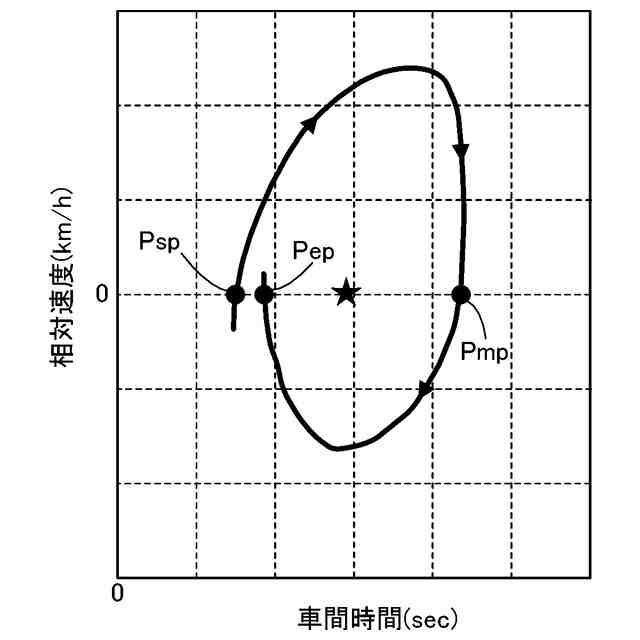
【解決手段】車載用制御装置は、先行車に自動的に追従して走行する自動追従走行モードを有する自動車に搭載され、自動追従走行モードの際の先行車との車間時間と自車の車速との車間関係に対して、自動追従走行モードを用いずに手動によって先行車を追従しているときに先行車に対する自車の相対速度が値0を跨いで正の値になったときを始点とし、始点から相対速度が値0を跨いで負の値となったときを中間点とし、中間点から相対速度が値0を跨いで正の値になったときを終点としたときに、始点から終点までの平均車間時間とを平均車速と車間関係として学習する。
【選択図】図2
特許請求の範囲
【請求項1】
先行車に自動的に追従して走行する自動追従走行モードを有する自動車に搭載されて前記自動追従走行モードの際の先行車との車間時間と自車の車速との車間関係を学習する車載用制御装置であって、
前記自動追従走行モードを用いずに手動によって先行車を追従しているときに先行車に対する自車の相対速度が値0を跨いで正の値になったときを始点とし、前記始点から前記相対速度が値0を跨いで負の値となったときを中間点とし、前記中間点から前記相対速度が値0を跨いで正の値になったときを終点としたときに、前記始点から前記終点までの平均車間時間とを平均車速と前記車間関係として学習する、
ことを特徴とする車載用制御装置。
発明の詳細な説明
【技術分野】
【0001】
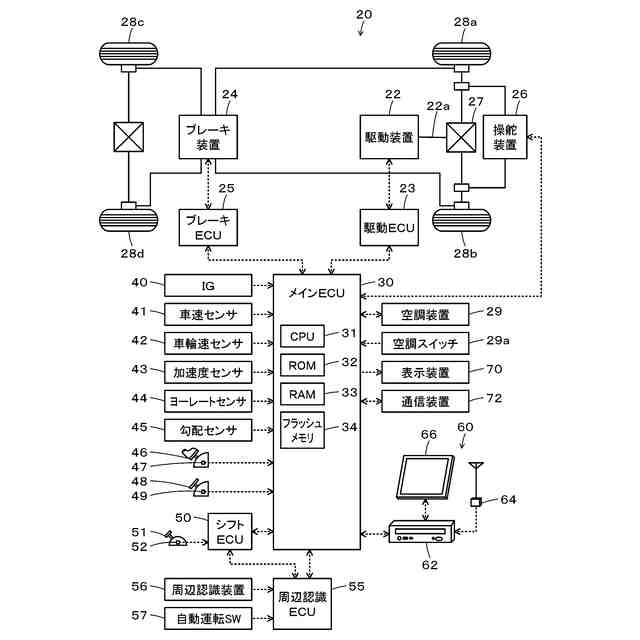
本開示は、車載用制御装置に関し、詳しくは、先行車に自動的に追従して走行する走行モードを有する自動車に搭載された車載用制御装置に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
従来、この種の車載用制御装置としては、自動追従制御が解除されている状態で、先行車との車間時間が設定範囲内である状況が設定時間継続する場合に運転者による追従運転状態として判断し、運転者の操作に応じた車両運転情報を基に自動追従制御の制御目標値を学習するものが提案されている(例えば、特許文献1参照)。この装置では、追従運転状態のときに車間時間と自車速とをサンプリングして車間時間を自車速の関数に変換し、自車速に応じた車間距離を学習している。
【先行技術文献】
【特許文献】
【0003】
特開2005-178518号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上述の車載用制御装置では、車間時間が設定範囲内である状況が設定時間継続する場合に運転者による追従運転状態として判断するため、車間距離の学習の機会が限定され、車間距離の学習をより適正に行なうことができない場合が生じる。
【0005】
本開示の車載用制御装置は、車間時間と自車速との車間関係をより適正に学習することことを主目的とする。
【課題を解決するための手段】
【0006】
本開示の車載用制御装置は、上述の主目的を達成するために以下の手段を採った。
【0007】
本開示の車載用制御装置は、先行車に自動的に追従して走行する自動追従走行モードを有する自動車に搭載されて前記自動追従走行モードの際の先行車との車間時間と自車の車速との車間関係を学習する車載用制御装置であって、前記自動追従走行モードを用いずに手動によって先行車を追従しているときに先行車に対する自車の相対速度が値0を跨いで正の値になったときを始点とし、前記始点から前記相対速度が値0を跨いで負の値となったときを中間点とし、前記中間点から前記相対速度が値0を跨いで正の値になったときを終点としたときに、前記始点から前記終点までの平均車間時間と平均車速とを前記車間関係として学習する、ことを特徴とする。
【0008】
本開示の車載用制御装置では、自動追従走行モードを用いずに手動によって先行車を追従しているときに先行車に対する自車の相対速度が値0を跨いで正の値になったときを始点とし、この始点から相対速度が値0を跨いで負の値となったときを中間点とし、中間点から相対速度が値0を跨いで正の値になったときを終点としたときに、始点から終点までの平均車間時間と平均車速とを車間関係として学習する。このように始点から終点までの平均車速と平均車間時間とを車間関係として学習することにより、車間時間と自車速との車間関係をより適正に学習することができる。
【0009】
本開示の車載用制御装置において、前記始点における車間時間と前記終点における先行車の車間時間との差分が第1所定時間未満のときに前記車間関係を学習するものとしてもよい。始点における車間時間と終点における先行車の車間時間との差分が大きいときには先行車に追従していないと考えられる場合が多いからである。また、前記始点の車間時間が第2所定時間未満であるときに前記車間関係を学習するものとしてもよい。始点の車間時間が大きいときには先行車に追従していないと考えられる場合が多いからである。さらに、前記始点から前記中間点までの所要時間が第3所定時間以上であり、且つ、前記中間点から前記終点までの所要時間が前記第3所定時間以上であるときに、前記車間関係を学習するものとしてもよい。始点から中間点までの所要時間が短すぎるときや、中間点から終点までの所要時間が短すぎるときには、安定して先行車に追従しているとは考えられない場合が多いからである。
【0010】
本開示の車載用制御装置において、前記自動追従走行モードで走行するときには、予め定められた複数の車間関係のうち前記学習結果に基づいて選択される車間関係を用いるものとしてもよい。この場合、選択される車間関係は、学習結果に最も近いものとしてもよく、学習結果より車間時間が大きいもののうち学習結果に基も近いものとしてもよい。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
トヨタ自動車株式会社
方法
5日前
トヨタ自動車株式会社
方法
5日前
トヨタ自動車株式会社
蓄電セル
5日前
トヨタ自動車株式会社
レーダ装置
5日前
トヨタ自動車株式会社
電気自動車
5日前
トヨタ自動車株式会社
情報処理装置
5日前
トヨタ自動車株式会社
情報処理装置
5日前
トヨタ自動車株式会社
情報処理装置
5日前
トヨタ自動車株式会社
情報処理装置
5日前
トヨタ自動車株式会社
情報処理装置
5日前
トヨタ自動車株式会社
車両後部構造
5日前
トヨタ自動車株式会社
管理システム
5日前
トヨタ自動車株式会社
樹脂溶解装置
5日前
トヨタ自動車株式会社
銅線の接合方法
5日前
トヨタ自動車株式会社
車両の制御装置
5日前
トヨタ自動車株式会社
NVH解析装置
5日前
トヨタ自動車株式会社
電池モジュール
5日前
トヨタ自動車株式会社
車両の制御装置
5日前
トヨタ自動車株式会社
車両挙動制御装置
5日前
トヨタ自動車株式会社
ラミネート型電池
5日前
トヨタ自動車株式会社
ルーフパネル構造
5日前
トヨタ自動車株式会社
ソーラー充電システム
5日前
トヨタ自動車株式会社
内燃機関の燃料供給装置
5日前
トヨタ自動車株式会社
車両の故障予兆検知装置
今日
トヨタ自動車株式会社
メタン化触媒の製造方法
5日前
株式会社デンソー
トランス
5日前
トヨタ自動車株式会社
内燃機関の燃料噴射制御装置
5日前
トヨタ自動車株式会社
サーバ、方法及びプログラム
5日前
トヨタ自動車株式会社
電極の製造方法、電極及び電池
5日前
トヨタ自動車株式会社
電極の製造方法、電極及び電池
5日前
トヨタ自動車株式会社
車両用動力伝達装置の制御装置
5日前
トヨタ自動車株式会社
電極の製造方法、電極及び電池
5日前
トヨタ自動車株式会社
制御装置、中継局及び制御方法
5日前
トヨタ自動車株式会社
制御装置、中継局及び制御方法
5日前
トヨタ自動車株式会社
電池セル、及び電池セル積層体
5日前
トヨタ自動車株式会社
ダイキャスト装置及び成形方法
5日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ