TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025020833
公報種別
公開特許公報(A)
公開日
2025-02-13
出願番号
2023124439
出願日
2023-07-31
発明の名称
制御装置、システム、制御方法、およびプログラム
出願人
日本電気株式会社
代理人
個人
主分類
G08G
1/16 20060101AFI20250205BHJP(信号)
要約
【課題】基地局と移動体との間の通信の通信品質が低下した際、通信量を削減すべき移動体を適切に選択し制御することが可能な制御装置、システム、制御方法、およびプログラムを提供すること。
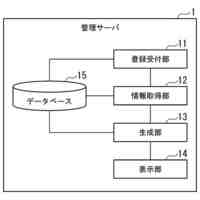
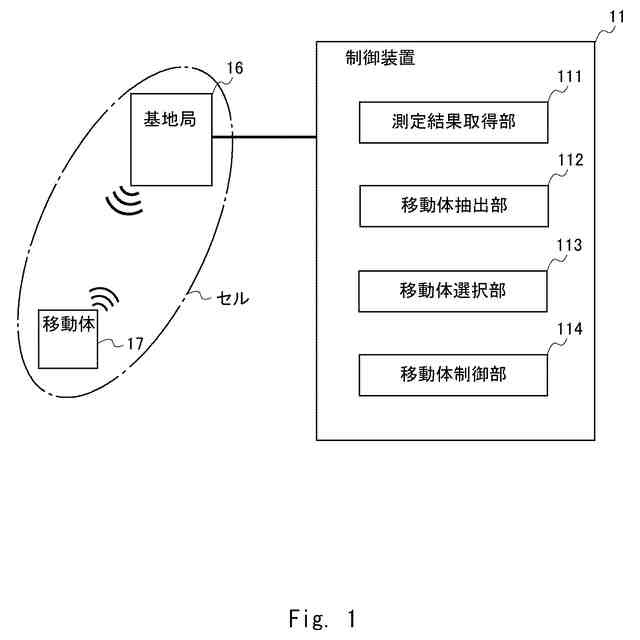
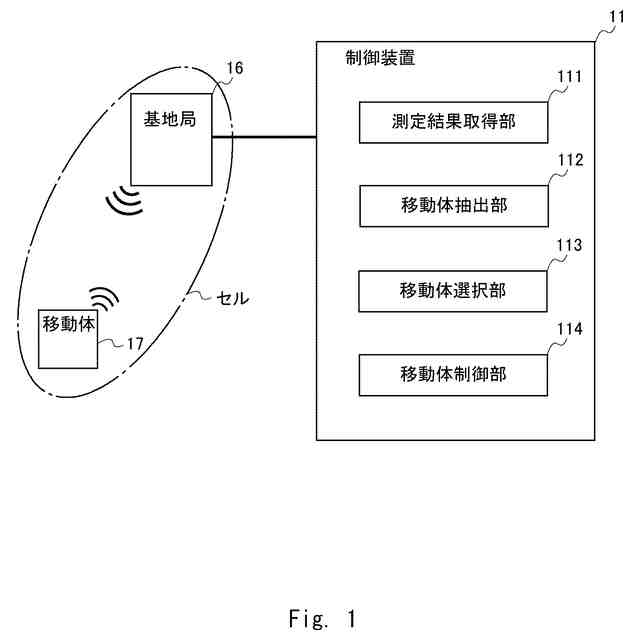
【解決手段】本開示に係る制御装置は、セル内における基地局と複数の移動体との間のそれぞれの通信の前記移動体での通信品質の測定結果を取得する測定結果取得部と、前記通信品質が前記移動体に設定されている通信品質設定情報に基づいた通信品質以下となる前記移動体を低品質移動体として複数の前記移動体から抽出する移動体抽出部と、前記低品質移動体に設定されている優先度情報が所定の優先度情報以下である低品質低優先度移動体を複数の前記低品質移動体から選択する移動体選択部と、前記低品質低優先度移動体の移動速度を所定の移動速度以下または停止するように制御する移動体制御部と、を備える。
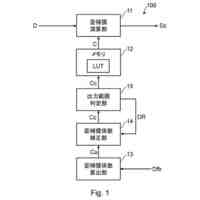
【選択図】図1
特許請求の範囲
【請求項1】
セル内における基地局と複数の移動体との間のそれぞれの通信の前記移動体での通信品質の測定結果を取得する測定結果取得部と、
前記通信品質が前記移動体に設定されている通信品質設定情報に基づいた通信品質以下となる前記移動体を低品質移動体として複数の前記移動体から抽出する移動体抽出部と、
前記低品質移動体に設定されている優先度情報が所定の優先度情報以下である低品質低優先度移動体を複数の前記低品質移動体から選択する移動体選択部と、
前記低品質低優先度移動体の移動速度を所定の移動速度以下または停止するように制御する移動体制御部と、
を備える制御装置。
続きを表示(約 3,500 文字)
【請求項2】
前記移動体制御部は、前記低品質低優先度移動体にカメラが搭載されている場合、前記カメラの分解能を所定の分解能以下に設定するように制御する、
請求項1に記載の制御装置。
【請求項3】
セル内における基地局と複数の移動体との間のそれぞれの通信の前記基地局での通信品質の測定結果を取得する測定結果取得部と、
複数の前記移動体との間の通信のうち少なくとも1つの通信の前記通信品質が所定の通信品質以下となった場合、今後、前記基地局との間で通信を試みる新たな移動体に対して、
移動速度を所定の移動速度以下または停止する、
優先度情報を所定の優先度情報以下に設定する、および
前記セル内に、現在通信している通信方式とは異なる他の通信方式が存在する場合、前記他の通信方式で通信する指示を出す、
のうち少なくともいずれか1つを実行するように制御する移動体制御部と、
を備える制御装置。
【請求項4】
前記移動体制御部は、前記新たな移動体に対して、前記他の通信方式で通信する指示を出すことに代えて、他のセル内の前記基地局と通信する指示を出す、
請求項3に記載の制御装置。
【請求項5】
複数の移動体の位置情報をそれぞれ取得する位置情報取得部と、
複数の前記移動体について、前記位置情報に基づいて移動体相互間の距離を求める距離計算部と、
複数の前記移動体相互間の距離のうち、前記移動体相互間の距離が所定の距離以下の所定の移動体間を抽出する移動体間抽出部と、
前記所定の移動体間の距離をLiDAR(Light Detection And Ranging)を用いて再度測定するLiDAR部と、
前記所定の移動体間を構成する第1の移動体と第2の移動体の第3方向における距離が前記所定の距離以下の場合、前記第1の移動体と前記第2の移動体は衝突の可能性が有ると判断する衝突判断部と、
前記第1の移動体と前記第2の移動体のうち、優先度情報が低い方の前記移動体の移動速度を所定の移動速度以下または停止するように制御する移動体制御部と、
を備え、
前記第1の移動体は第1方向および前記第1方向と直交する第2方向を含む第1平面に沿って移動し、
前記第2の移動体は前記第1平面に沿って移動し、
前記第3方向は、前記第1平面に垂直な方向である、
制御装置。
【請求項6】
前記移動体の前記位置情報は、GPS(Global Positioning System)測位により測定される、
請求項5に記載の制御装置。
【請求項7】
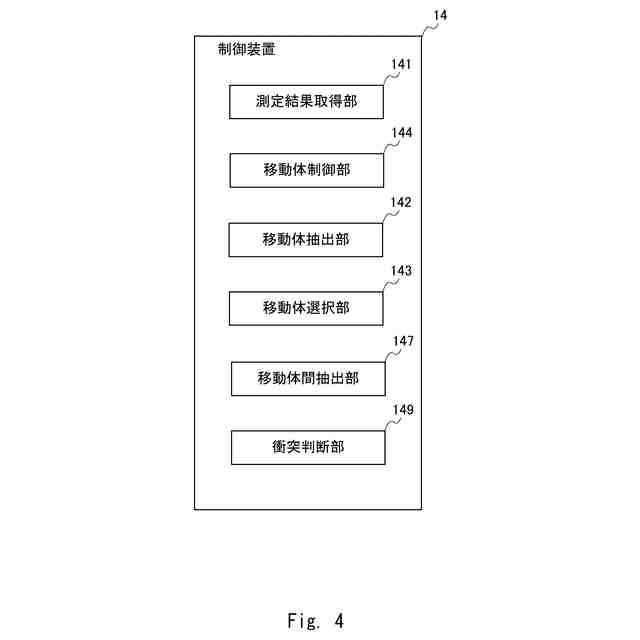
測定結果取得部と、移動体制御部と、移動体抽出部と、移動体選択部と、移動体間抽出部と、衝突判断部と、を備え、
前記測定結果取得部は、
セル内における基地局と複数の移動体との間のそれぞれの通信の前記基地局での通信品質の測定結果を取得し、
前記移動体制御部は、
複数の前記移動体との間の通信のうち少なくとも1つの通信の前記基地局での前記通信品質が所定の通信品質以下となった場合、今後、前記基地局との間で通信を試みる新たな移動体に対して、
移動速度を所定の移動速度以下または停止する、
優先度情報を所定の優先度情報以下に設定する、および、
前記セル内に、現在通信している通信方式とは異なる他の通信方式が存在する場合、前記他の通信方式で通信する指示を出す、
のうち少なくともいずれか1つを実行するように制御し、
前記測定結果取得部は、
前記セル内における前記基地局と複数の前記移動体との間のそれぞれの通信の前記移動体での前記通信品質の測定結果を取得し、
前記移動体抽出部は、前記移動体での前記通信品質が予め設定された前記優先度情報に基づいた通信品質以下となる低品質移動体を、複数の前記移動体から抽出し、
前記移動体間抽出部は、複数の前記移動体の位置情報に基づいて求められた複数の移動体相互間の距離のうち、前記移動体相互間の距離が所定の距離以下の所定の移動体間を抽出し、
前記衝突判断部は、前記所定の移動体間を構成する第1の移動体と第2の移動体の第3方向における距離が前記所定の距離以下の場合、前記第1の移動体と前記第2の移動体は衝突の可能性が有ると判断し、
前記移動体選択部は、前記低品質移動体に設定されている前記優先度情報が所定の優先度情報以下である低品質低優先度移動体を複数の前記低品質移動体から選択すると共に、前記第1の移動体と前記第2の移動体のうち、前記優先度情報が低い方の移動体を選択し、
前記移動体制御部は、前記低品質低優先度移動体、および前記優先度情報が前記低い方の移動体の移動速度を前記所定の移動速度以下または停止するように制御し、
前記第1の移動体は第1方向および前記第1方向と直交する第2方向を含む第1平面に沿って移動し、
前記第2の移動体は前記第1平面に沿って移動し、
前記第3方向は、前記第1平面に垂直な方向である、
制御装置。
【請求項8】
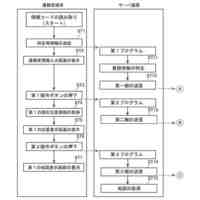
セル内に有する移動体と、前記移動体と通信する基地局と、前記移動体および前記基地局を制御する制御装置と、を備え、
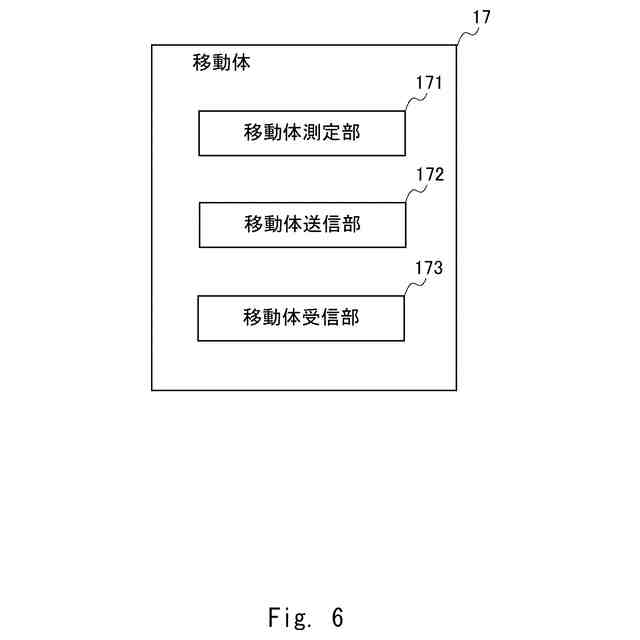
前記移動体は、
前記移動体での通信品質を測定して測定結果を取得する移動体測定部と、
前記測定結果および前記移動体に予め設定された優先度情報を前記基地局経由で前記制御装置に送信する移動体送信部と、
前記移動体を制御するための制御情報を前記制御装置から前記基地局経由で受信する移動体受信部と、を有し、
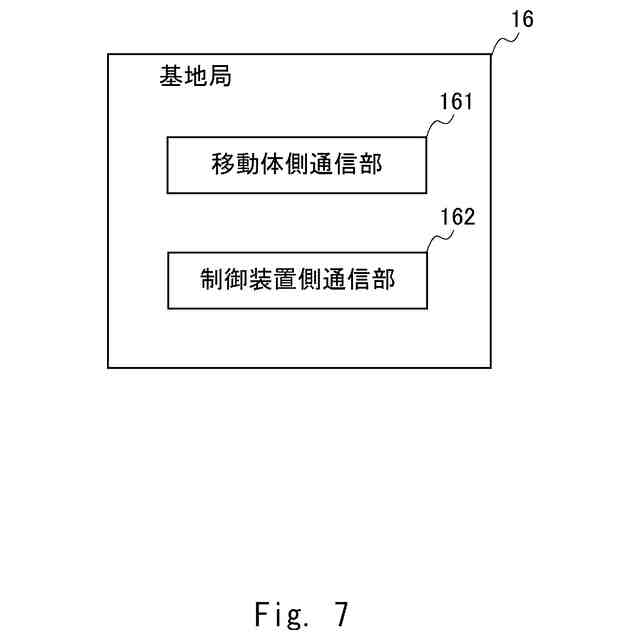
前記基地局は、
前記測定結果および前記優先度情報を前記移動体から受信し、前記制御情報を前記移動体に送信する移動体側基地局通信部と、
前記測定結果および前記優先度情報を前記制御装置に送信し、前記制御情報を前記制御装置から受信する制御装置側基地局通信部と、
を有し、
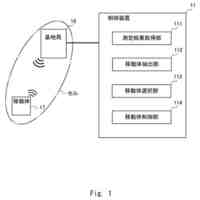
前記制御装置は、
前記セル内における前記基地局と複数の前記移動体との間のそれぞれの通信の前記移動体での前記通信品質の前記測定結果を取得する測定結果取得部と、
前記通信品質が前記移動体に設定されている通信品質設定情報に基づいた前記通信品質以下となる前記移動体を低品質移動体として複数の前記移動体から抽出する移動体抽出部と、
前記低品質移動体に設定されている前記優先度情報が所定の優先度情報以下である低品質低優先度移動体を複数の前記低品質移動体から選択する移動体選択部と、
前記低品質低優先度移動体の移動速度を所定の移動速度以下または停止するように制御する移動体制御部と、を有する、
システム。
【請求項9】
セル内における基地局と複数の移動体との間のそれぞれの通信の前記移動体での通信品質の測定結果を取得することと、
前記通信品質が前記移動体に設定されている通信品質設定情報に基づいた通信品質以下となる前記移動体を低品質移動体として複数の前記移動体から抽出することと、
前記低品質移動体に設定されている優先度情報が所定の優先度情報以下である低品質低優先度移動体を複数の前記低品質移動体から選択することと、
前記低品質低優先度移動体の移動速度を所定の移動速度以下または停止するように制御することと、
を備える制御方法。
【請求項10】
セル内における基地局と複数の移動体との間のそれぞれの通信の前記移動体での通信品質の測定結果を取得することと、
前記通信品質が前記移動体に設定されている通信品質設定情報に基づいた通信品質以下となる前記移動体を低品質移動体として複数の前記移動体から抽出することと、
前記低品質移動体に設定されている優先度情報が所定の優先度情報以下である低品質低優先度移動体を複数の前記低品質移動体から選択することと、
前記低品質低優先度移動体の移動速度を所定の移動速度以下または停止するように制御することと、
をコンピュータに実行させるプログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、制御装置、システム、制御方法、およびプログラムに関し、特に、基地局と移動体との間の通信の通信品質が低下した際、通信量を削減すべき移動体を適切に選択し制御することが可能な制御装置、システム、制御方法、およびプログラムに関する。
続きを表示(約 2,600 文字)
【背景技術】
【0002】
近年、自動車、ドローン、ロボット等の移動体を自動運転制御する場合においては、通信ネットワーク(NW:Net Work)を介した通信制御(遠隔制御)のリアルタイム性が重要となっている。また、移動体を安全で公平に自動運転制御することが可能な社会を実現するためには、以下に示すような問題(課題)がある。
移動体が移動して特定の基地局に通信が集中することで発生する通信NWの輻輳を回避すること。
移動体の渋滞防止および物理的な衝突事故を防止するため、屋内および屋外における移動体の位置情報を正確に把握すること。
高速移動を伴う移動体に対して、NW遅延量をより小さくすること。
【0003】
これらの問題の解決として、基地局の性能を向上させてNW遅延量を低下させること、NWスライスによる優先度を制御して無線通信を高度化させること等が挙げられる。しかしながら、各々の移動体は相互に無関係で排他的な通信を行うため、場合によっては物理的に衝突することもあり、無線通信と共に移動体の物理的な動きにも着目し、それらを制御する必要がある。
【0004】
特許文献1には、「移動体制御装置は、対象の第1の移動体と、第1の移動体に衝突する可能性が高い第2の移動体それぞれについて、位置を表す位置情報と、速度を表す速度情報と、交差点の位置を表す交差点位置情報と、通信の遅延時間を表す通信遅延時間情報とを用いて、第1の移動体が交差点へ到達する第1の到達時間と、第2の移動体が交差点へ到達する第2の到達時間とを算出して、第1の移動体と第2の移動体とが交差点において衝突するか否かを推定する、推定部と、第1の移動体と第2の移動体とが交差点において衝突すると推定された場合、第1の移動体と第2の移動体との距離を表す距離情報と、第1の移動体の制動距離を表す制動距離情報と、第2の移動体の速度情報と通信遅延時間とを用いて表される衝突回避条件に基づいて、交差点において衝突回避可能な第1の移動体の速度を算出する、算出部とを有する。」が開示されている。特許文献1には、「通信品質が移動体に設定されている通信品質設定情報に基づいた通信品質以下となる移動体を低品質移動体として複数の移動体から抽出すること」は、開示されていない。また、特許文献1には、水平方向に移動する第1の移動体と第2の移動体について、垂直方向における距離が所定の距離の場合、第1の移動体と第2の移動体は衝突の可能性が有ると判断することは、開示されていない。
【先行技術文献】
【特許文献】
【0005】
国際公開第2020/194729号
【発明の概要】
【発明が解決しようとする課題】
【0006】
上述のとおり、移動体について、通信NWの輻輳や物理的な衝突回避のため、無線通信の制御と共に、移動体の物理的な動きの制御をする必要があるという課題があった。
【0007】
本開示の目的は、上述した課題を解決するため、基地局と移動体との間の通信の通信品質が低下した際、通信量を削減すべき移動体を適切に選択し制御することが可能な制御装置、システム、制御方法、およびプログラムを提供することにある。
【課題を解決するための手段】
【0008】
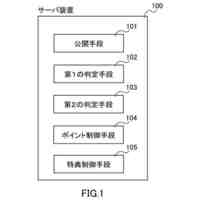
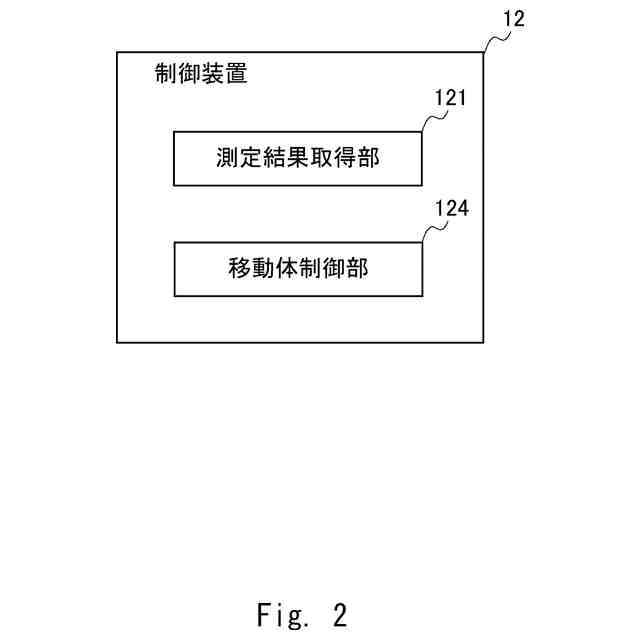
本開示に係る制御装置は、
セル内における基地局と複数の移動体との間のそれぞれの通信の前記移動体での通信品質の測定結果を取得する測定結果取得部と、
前記通信品質が前記移動体に設定されている通信品質設定情報に基づいた通信品質以下となる前記移動体を低品質移動体として複数の前記移動体から抽出する移動体抽出部と、
前記低品質移動体に設定されている優先度情報が所定の優先度情報以下である低品質低優先度移動体を複数の前記低品質移動体から選択する移動体選択部と、
前記低品質低優先度移動体の移動速度を所定の移動速度以下または停止するように制御する移動体制御部と、
を備える。
【0009】
本開示に係る制御装置は、
セル内における基地局と複数の移動体との間のそれぞれの通信の前記基地局での通信品質の測定結果を取得する測定結果取得部と、
複数の前記移動体との間の通信のうち少なくとも1つの通信の前記通信品質が所定の通信品質以下となった場合、今後、前記基地局との間で通信を試みる新たな移動体に対して、
移動速度を所定の移動速度以下または停止する、
優先度情報を所定の優先度情報以下に設定する、および
前記セル内に、現在通信している通信方式とは異なる他の通信方式が存在する場合、前記他の通信方式で通信する指示を出す、
のうち少なくともいずれか1つを実行するように制御する移動体制御部と、
を備える。
【0010】
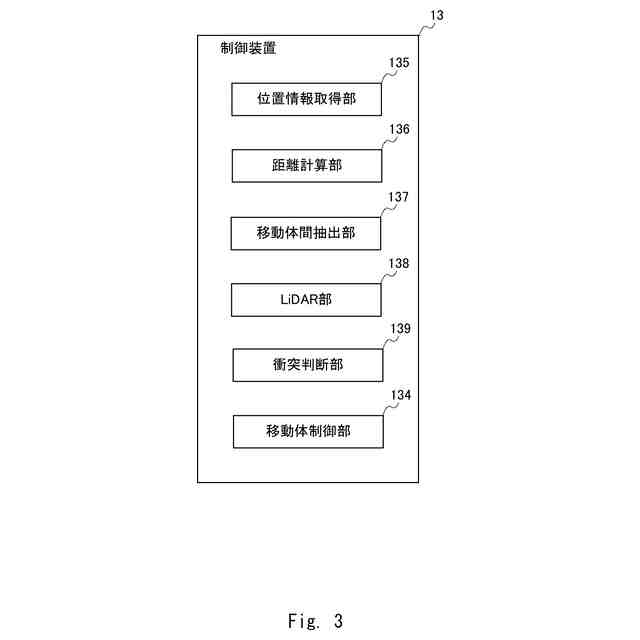
本開示に係る制御装置は、
複数の移動体の位置情報をそれぞれ取得する位置情報取得部と、
複数の前記移動体について、前記位置情報に基づいて移動体相互間の距離を求める距離計算部と、
複数の前記移動体相互間の距離のうち、前記移動体相互間の距離が所定の距離以下の所定の移動体間を抽出する移動体間抽出部と、
前記所定の移動体間の距離をLiDAR(Light Detection And Ranging)を用いて再度測定するLiDAR部と、
前記所定の移動体間を構成する第1の移動体と第2の移動体の第3方向における距離が前記所定の距離以下の場合、前記第1の移動体と前記第2の移動体は衝突の可能性が有ると判断する衝突判断部と、
前記第1の移動体と前記第2の移動体のうち、優先度情報が低い方の前記移動体の移動速度を所定の移動速度以下または停止するように制御する移動体制御部と、
を備え、
前記第1の移動体は第1方向および前記第1方向と直交する第2方向を含む第1平面に沿って移動し、
前記第2の移動体は前記第1平面に沿って移動し、
前記第3方向は、前記第1平面に垂直な方向である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日本電気株式会社
デルタシグマ変調装置
9日前
日本電気株式会社
超伝導共振回路及び測定方法
10日前
日本電気株式会社
回転台、制御システム、および制御方法
3日前
日本電気株式会社
情報処理装置、情報処理方法、プログラム
2日前
日本電気株式会社
情報処理装置、情報処理方法、及びプログラム
2日前
日本電気株式会社
情報処理装置、情報処理方法、及びプログラム
2日前
日本電気株式会社
衛星制御装置、衛星制御方法、およびプログラム
9日前
日本電気株式会社
超伝導量子回路装置と超伝導量子回路の制御方法
9日前
日本電気株式会社
最適化装置、最適化方法および最適化プログラム
2日前
日本電気株式会社
サーバ装置、サーバ装置の制御方法及びプログラム
3日前
日本電気株式会社
制御装置、システム、制御方法、およびプログラム
3日前
日本電気株式会社
管制局、処理システム、処理方法、およびプログラム
2日前
日本電気株式会社
車両追跡方法、車両追跡システム、およびプログラム
10日前
日本電気株式会社
無線通信装置、無線通信方法、及び無線通信システム
2日前
日本電気株式会社
映像符号化装置
10日前
日本電気株式会社
歪補償回路、無線送信装置、歪補償方法、及び歪補償プログラム
9日前
中部電力株式会社
設備構造推定装置及び設備構造推定プログラム
10日前
日本電気株式会社
制御装置、量子アニーリングシステム、制御方法およびプログラム
10日前
日本電気株式会社
暗号化装置、復号装置、暗号システム、暗号化方法、復号方法およびプログラム
10日前
日本電気株式会社
プログラム、及び、集荷支援方法
4日前
日本電気株式会社
映像符号化装置および映像復号装置
2日前
日本電気株式会社
溶断装置および溶断装置の制御方法
4日前
日本電気株式会社
オンライン会議支援装置、オンライン会議支援システムおよびオンライン会議支援方法
10日前
日本電気株式会社
情報処理装置、制御方法、及びプログラム
10日前
日本電気株式会社
無線LAN端末、無線LAN基地局、及び方法
2日前
日本電気株式会社
プログラム、情報処理方法、および情報処理システム
4日前
日本電気株式会社
干渉エリア情報出力装置、干渉エリア情報出力システム、干渉エリア情報出力方法および干渉エリア情報出力プログラム
2日前
日本電気株式会社
情報処理装置、情報処理システム、情報処理方法、および情報処理プログラム
2日前
個人
自動運転車
1か月前
ニッタン株式会社
煙感知器
2か月前
個人
迷子支援システム
1か月前
個人
万引き防止システム
2日前
株式会社ニカデン
検出装置
16日前
株式会社サンライン
発炎筒携行容器
1か月前
ABT合同会社
詐欺防止装置
2日前
能美防災株式会社
表示灯カバー
2か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ