TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025015989
公報種別
公開特許公報(A)
公開日
2025-01-31
出願番号
2023118954
出願日
2023-07-21
発明の名称
移動体管理装置、移動体管理システム、移動体管理方法、および移動体管理プログラム
出願人
三菱電機ビルソリューションズ株式会社
代理人
弁理士法人高田・高橋国際特許事務所
主分類
G06Q
50/10 20120101AFI20250124BHJP(計算;計数)
要約
【課題】施設においてより効率的に稼働させられるように自律移動体の移動を管理する移動体管理装置、移動体管理システム、移動体管理方法及び移動体管理プログラムを提供する。
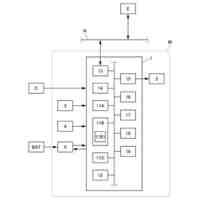
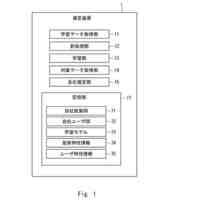
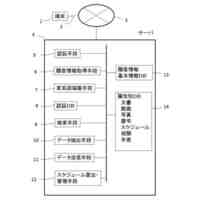
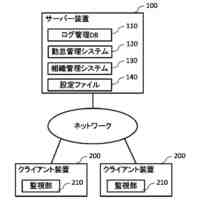
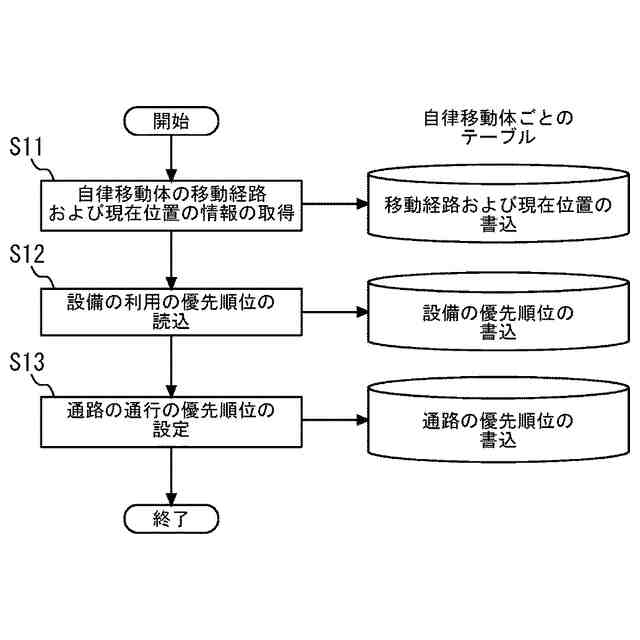
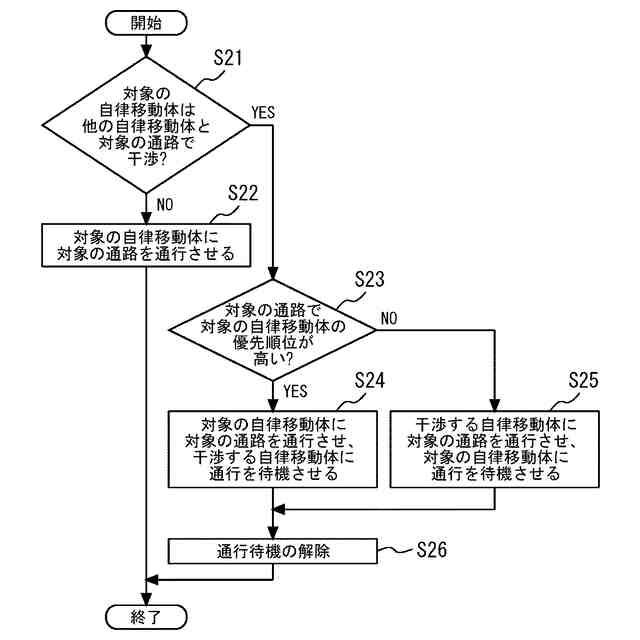
【解決手段】移動体管理システム1において、移動体管理装置7は、連携管理部12と、指令部16と、を備える。連携管理部12は、施設を移動する自律移動体2の各々について、施設に設けられた各々の設備6の利用の優先順位を管理する。2つの自律移動体2が、現在位置から目的地に移動するまでに通行する通路において互いに干渉することがある。この場合に、指令部16は、当該通路の前後に利用する設備6に関して連携管理部12が管理する優先順位に基づいて、いずれか一方の自律移動体2を優先して当該通路を通行させる指示を、両方の自律移動体2に対して行う。
【選択図】図1
特許請求の範囲
【請求項1】
各々が施設を移動する第1自律移動体および第2自律移動体について、前記施設に設けられた複数の設備の各々の利用優先順位を管理する連携管理部と、
前記第1自律移動体および前記第2自律移動体が現在位置から目的地に移動するまでに通行する通路において互いに干渉する場合に、前記複数の設備のうち前記通路の前または後に利用する設備に関して前記連携管理部が管理する前記利用優先順位に基づいて、前記第1自律移動体および前記第2自律移動体のいずれか一方を優先して前記通路を通行させる指示を前記第1自律移動体および前記第2自律移動体の両方に対して行う指令部と、
を備える、移動体管理装置。
続きを表示(約 1,500 文字)
【請求項2】
前記指令部は、前記第1自律移動体を優先させるときに、前記第2自律移動体が前記通路で前記第1自律移動体とすれ違い可能である場合に、前記第2自律移動体に停止の指示を行う、
請求項1に記載の移動体管理装置。
【請求項3】
前記指令部は、前記第1自律移動体を優先させるときに、前記第2自律移動体が前記通路で前記第1自律移動体とすれ違い不能である場合に、前記第2自律移動体に退避場所への移動の指示を行う、
請求項1に記載の移動体管理装置。
【請求項4】
前記指令部は、前記第1自律移動体を優先させるときに、前記通路の前または後の設備として通行可否を管理する通行管理設備が設けられている場合に、前記第1自律移動体が前記通行管理設備の通行を完了するまで、前記第2自律移動体に前記通行管理設備の通行を待機させる指示を行う、
請求項1から請求項3のいずれか一項に記載の移動体管理装置。
【請求項5】
前記指令部は、前記第1自律移動体を優先させるときに、前記第1自律移動体が前記通路の通行を完了した後に、前記第2自律移動体に前記通路の通行を許可する、
請求項1から請求項3のいずれか一項に記載の移動体管理装置。
【請求項6】
第1自律移動体および第2自律移動体の各々が移動する施設に設けられた複数の設備と、
前記第1自律移動体および前記第2自律移動体について、前記複数の設備の各々の利用優先順位を管理する連携管理部と、
前記第1自律移動体および前記第2自律移動体が現在位置から目的地に移動するまでに通行する通路において互いに干渉する場合に、前記複数の設備のうち前記通路の前または後に利用する設備に関して前記連携管理部が管理する前記利用優先順位に基づいて、前記第1自律移動体および前記第2自律移動体のいずれか一方を優先して前記通路を通行させる指示を前記第1自律移動体および前記第2自律移動体の両方に対して行う指令部と、
を備える、移動体管理システム。
【請求項7】
コンピュータが、
各々が施設を移動する第1自律移動体および第2自律移動体について、前記施設に設けられた複数の設備の各々の利用優先順位を管理することと、
前記第1自律移動体および前記第2自律移動体が現在位置から目的地に移動するまでに通行する通路において互いに干渉する場合に、前記複数の設備のうち前記通路の前または後に利用する設備に関する前記利用優先順位に基づいて、前記第1自律移動体および前記第2自律移動体のいずれか一方を優先して前記通路を通行させる指示を前記第1自律移動体および前記第2自律移動体の両方に対して行うことと、
を実行する、移動体管理方法。
【請求項8】
コンピュータに、
各々が施設を移動する第1自律移動体および第2自律移動体について、前記施設に設けられた複数の設備の各々の利用優先順位を管理することと、
前記第1自律移動体および前記第2自律移動体が現在位置から目的地に移動するまでに通行する通路において互いに干渉する場合に、前記複数の設備のうち前記通路の前または後に利用する設備に関する前記利用優先順位に基づいて、前記第1自律移動体および前記第2自律移動体のいずれか一方を優先して前記通路を通行させる指示を前記第1自律移動体および前記第2自律移動体の両方に対して行うことと、
を実行させる、移動体管理プログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、移動体管理装置、移動体管理システム、移動体管理方法、および移動体管理プログラムに関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
特許文献1は、移動支援システムの例を開示する。移動支援システムは、ロボットなどの自律移動体によるエレベーターの行先階の登録を受け付ける。移動支援システムは、登録された行先階に対応する呼びに、エレベーターのいずれかのかごを割り当てる。
【先行技術文献】
【特許文献】
【0003】
国際公開第2020/230305号
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1の移動支援システムにおいて、施設を移動する複数の自律移動体に、当該施設の設備であるエレベーターの利用の優先度が設定される。一方、施設において設備に至るまでの通路については、優先度が設定されていない。このため、施設を移動する複数の自律移動体同士が、優先度の設定されない通路において、互いに身動きが取れなくなる膠着状態に陥る可能性がある。このとき、自律移動体が施設において効率的に稼働できない可能性がある。
【0005】
本開示は、このような課題の解決に係るものである。本開示は、施設においてより効率的に稼働させられるように自律移動体の移動を管理する移動体管理装置、移動体管理システム、移動体管理方法、および移動体管理プログラムを提供する。
【課題を解決するための手段】
【0006】
本開示に係る移動体管理装置は、各々が施設を移動する第1自律移動体および第2自律移動体について、前記施設に設けられた複数の設備の各々の利用優先順位を管理する連携管理部と、前記第1自律移動体および前記第2自律移動体が現在位置から目的地に移動するまでに通行する通路において互いに干渉する場合に、前記複数の設備のうち前記通路の前または後に利用する設備に関して前記連携管理部が管理する前記利用優先順位に基づいて、前記第1自律移動体および前記第2自律移動体のいずれか一方を優先して前記通路を通行させる指示を前記第1自律移動体および前記第2自律移動体の両方に対して行う指令部と、を備える。
【0007】
本開示に係る移動体管理システムは、第1自律移動体および第2自律移動体の各々が移動する施設に設けられた複数の設備と、前記第1自律移動体および前記第2自律移動体について、前記複数の設備の各々の利用優先順位を管理する連携管理部と、前記第1自律移動体および前記第2自律移動体が現在位置から目的地に移動するまでに通行する通路において互いに干渉する場合に、前記複数の設備のうち前記通路の前または後に利用する設備に関して前記連携管理部が管理する前記利用優先順位に基づいて、前記第1自律移動体および前記第2自律移動体のいずれか一方を優先して前記通路を通行させる指示を前記第1自律移動体および前記第2自律移動体の両方に対して行う指令部と、を備える。
【0008】
本開示に係る移動体管理方法は、コンピュータが、各々が施設を移動する第1自律移動体および第2自律移動体について、前記施設に設けられた複数の設備の各々の利用優先順位を管理することと、前記第1自律移動体および前記第2自律移動体が現在位置から目的地に移動するまでに通行する通路において互いに干渉する場合に、前記複数の設備のうち前記通路の前または後に利用する設備に関する前記利用優先順位に基づいて、前記第1自律移動体および前記第2自律移動体のいずれか一方を優先して前記通路を通行させる指示を前記第1自律移動体および前記第2自律移動体の両方に対して行うことと、を実行する方法である。
【0009】
本開示に係る移動体管理プログラムは、コンピュータに、各々が施設を移動する第1自律移動体および第2自律移動体について、前記施設に設けられた複数の設備の各々の利用優先順位を管理することと、前記第1自律移動体および前記第2自律移動体が現在位置から目的地に移動するまでに通行する通路において互いに干渉する場合に、前記複数の設備のうち前記通路の前または後に利用する設備に関する前記利用優先順位に基づいて、前記第1自律移動体および前記第2自律移動体のいずれか一方を優先して前記通路を通行させる指示を前記第1自律移動体および前記第2自律移動体の両方に対して行うことと、を実行させる。
【発明の効果】
【0010】
本開示に係る移動体管理装置、移動体管理システム、移動体管理方法、または移動体管理プログラムによれば、施設においてより効率的に稼働させられるように自律移動体の移動が管理されるようになる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
情報提示方法
18日前
個人
プログラム
17日前
個人
RFタグ読取装置
1か月前
個人
自動精算システム
26日前
個人
アカウントマップ
11日前
個人
プログラム
10日前
個人
自動精算システム
2か月前
個人
売買システム
1か月前
個人
救急搬送システム
2か月前
個人
管理サーバ
1か月前
個人
市場受発注システム
24日前
個人
発想支援方法及びシステム
21日前
日本精機株式会社
車両用表示装置
1か月前
個人
分類処理プログラム及び方法
21日前
日本精機株式会社
車両用表示装置
1か月前
キヤノン株式会社
印刷装置
2か月前
個人
学習装置及び推論装置
10日前
富士通株式会社
金融システム
18日前
井関農機株式会社
ロボット作業車両
26日前
個人
生成AIとの常時接続システム
2か月前
株式会社発明屋
電池指向の構造設計
4日前
個人
VRによる人体各部位の立体化
1か月前
トヨタ自動車株式会社
推定装置
1か月前
個人
コンテンツ開示順位判定システム
2か月前
トヨタ自動車株式会社
管理装置
5日前
キヤノン株式会社
情報処理装置
1か月前
個人
未来型家系図構築システム
1か月前
株式会社SEKT
文字認識装置
1か月前
株式会社COLORS
表示装置
2か月前
株式会社プレニーズ
仲介システム
11日前
キヤノン電子株式会社
業務管理システム
2か月前
トヨタ自動車株式会社
表認識装置
1か月前
富士通株式会社
プロセッサ
3日前
トヨタ自動車株式会社
情報通知方法
24日前
個人
販売支援システム
26日前
トヨタ自動車株式会社
作業評価装置
1か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ