TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025014949
公報種別
公開特許公報(A)
公開日
2025-01-30
出願番号
2023117940
出願日
2023-07-20
発明の名称
追跡システム、追跡方法、および、プログラム
出願人
株式会社デンソー
,
トヨタ自動車株式会社
,
株式会社ミライズテクノロジーズ
代理人
弁理士法人明成国際特許事務所
主分類
G06T
7/277 20170101AFI20250123BHJP(計算;計数)
要約
【課題】追跡する画像間のターゲットの対応付けの正確さを向上する。
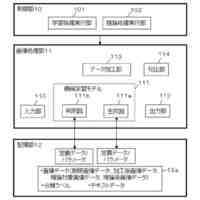
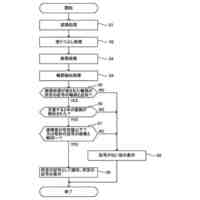
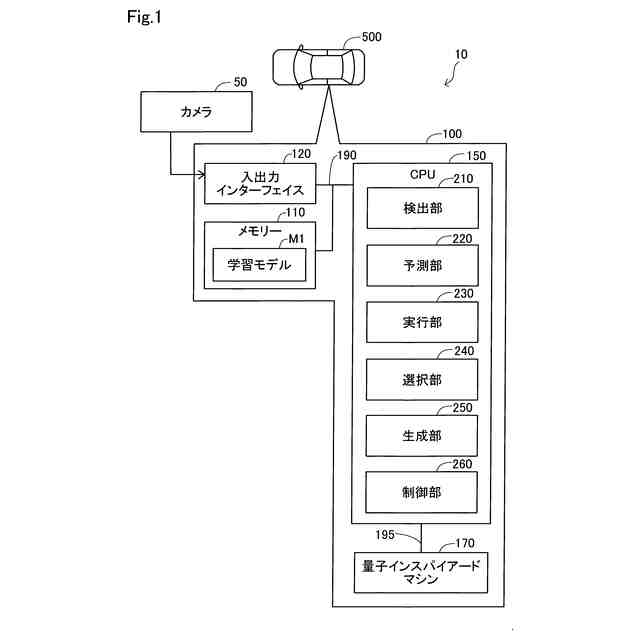
【解決手段】追跡システム10は、現フレーム内の物体が存在する領域を表す物体領域情報と現フレーム内でターゲットが存在すると予測される領域を表す予測情報とを用いて、現フレーム内で検出されたターゲットと予測ターゲットとの対応付けの解を得る最適化処理を複数の異なる探索条件の下でJ回(Jは2以上の整数)実行し、J個の対応付けの解をコスト関数の評価値とともに出力する最適化処理部170と、コスト関数の評価値に基づいてJ個の対応付けの解からK(Kは2以上かつJ以下の整数)組を選択する選択部240と、(K-M)組(Mは0以上の整数)の対応付けの解と現フレームについての物体領域情報とを用いて、次フレーム内のターゲットが存在する領域を表す予測情報の生成に用いるための現フレームについての(K-M)組の対象領域情報を生成する生成部250と、を備える。
【選択図】図1
特許請求の範囲
【請求項1】
時系列で取得された複数のフレーム内のターゲットを追跡する追跡システム(10)であって、
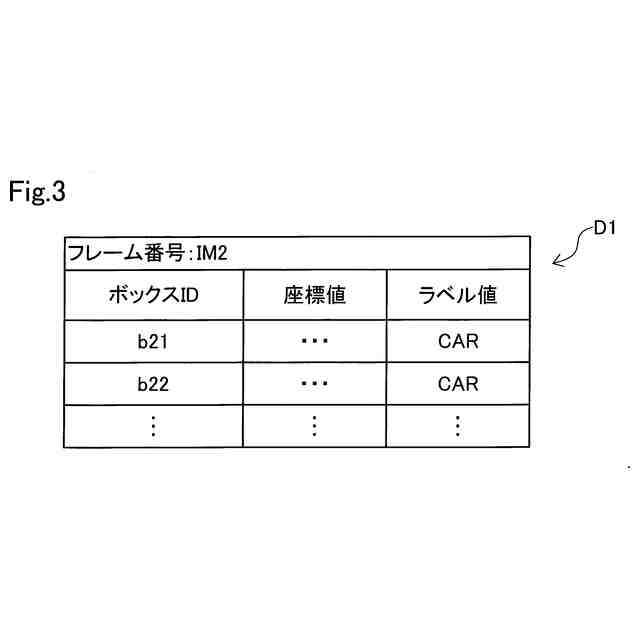
現フレームに基づいて前記現フレーム内の物体が存在する領域を表す物体領域情報(D1)を出力する検出部(210)と、
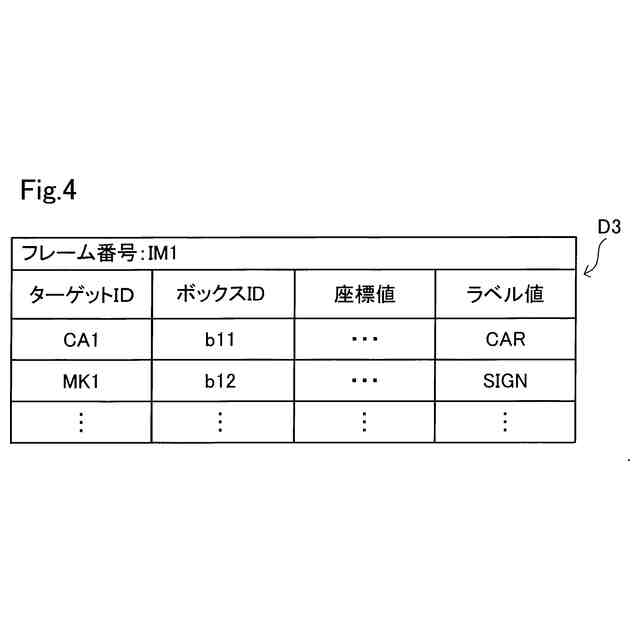
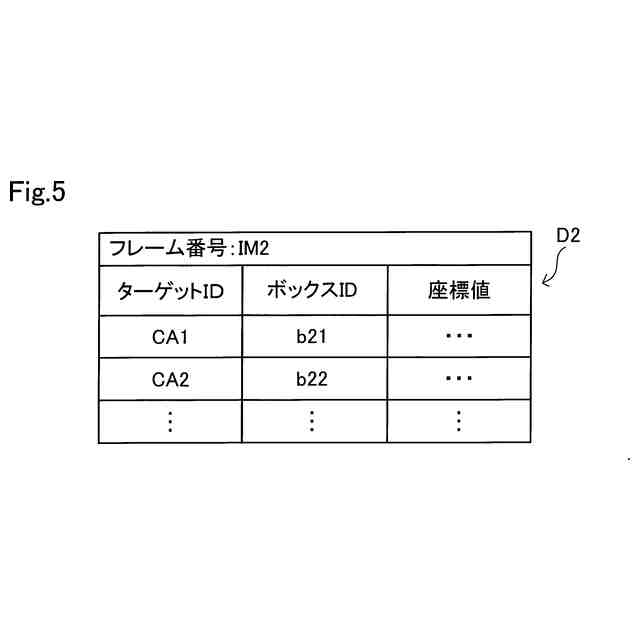
前フレーム内で検出されたターゲットが存在する領域を表す対象領域情報(D3)を用いて、前記現フレーム内で前記ターゲットが存在すると予測される領域を表す予測情報(D2)を出力する予測部(220)と、
前記物体領域情報と前記予測情報とを用いて、前記現フレーム内で検出された前記ターゲットと予測ターゲットとの対応付けの解を得る最適化処理を、複数の異なる探索条件の下でJ回(Jは2以上の整数)実行し、J個の対応付けの解をそれぞれに対応するコスト関数の評価値とともに出力する最適化処理部(70)と、
前記コスト関数の評価値に基づいて前記J個の対応付けの解から、K組(Kは2以上かつJ以下の整数)の対応付けの解を選択する選択部(240)と、
(K-M)組(Mは0以上の整数)の対応付けの解と、前記現フレームについての前記物体領域情報とを用いて、次フレーム内の前記ターゲットが存在する領域を表す前記予測情報の生成に用いるための前記現フレームについての前記対象領域情報として、(K-M)組の前記対象領域情報を生成する生成部(250)と、
前記検出部と、前記予測部と、前記最適化処理部と、前記選択部と、前記生成部と、にそれぞれの処理を前記複数のフレームについて順次実行させる制御部(260)と、
を備える追跡システム。
続きを表示(約 2,000 文字)
【請求項2】
請求項1に記載の追跡システムであって、
前記生成部は、前記K組の対応付けの解のうちの2組以上の対応付けの解が同じである場合、同じである前記2組以上の対応付けの解のうち1組だけを残すことにより、前記K組の対応付けの解を前記(K-M)組の対応付けの解に絞り込む、
追跡システム。
【請求項3】
請求項2に記載の追跡システムであって、
前記最適化処理部による前記最適化処理では、量子力学的な揺らぎを用いた状態探索のアルゴリズムが用いられる、
追跡システム。
【請求項4】
請求項3に記載の追跡システムであって、
前記異なる探索条件下とは、前記現フレーム内で検出された前記物体と、前記前フレーム内で検出された前記ターゲットと、の対応付けの組み合わせを探索する問題をイジングモデルで定式化した場合における制約項の重みと、変数として取り得る値を表す量子ビットの数と、前記量子ビットの初期値と、のうちの少なくともひとつが異なっていることである、
追跡システム。
【請求項5】
請求項4に記載の追跡システムであって、
前記生成部は、前記(K-M)組の対応付けの解のうちから、それぞれの対応付けの解についての評価値に基づいて選択した1つの対応付けの解を最適解として出力する、
追跡システム。
【請求項6】
時系列で取得された複数のフレーム内のターゲットを追跡する追跡方法であって、
第1コンピュータ(100)が、現フレームに基づいて現フレーム内の物体が存在する領域を表す物体領域情報(D1)を出力する検出ステップと、
前記第1コンピュータが、前フレーム内で検出されたターゲットが存在する領域を表す対象領域情報(D3)を用いて、前記現フレーム内で前記ターゲットが存在すると予測される領域を表す予測情報(D2)を出力する予測ステップと、
量子インスパイアードマシン(170)が、前記物体領域情報と前記予測情報とを用いて、前記現フレーム内で検出された前記ターゲットと予測ターゲットとの対応付けの解を得る最適化処理を、複数の異なる探索条件の下でJ回(Jは2以上の整数)実行し、J個の対応付けの解をそれぞれに対応するコスト関数の評価値とともに出力する最適化処理ステップと、
前記第1コンピュータが、前記コスト関数の評価値に基づいて前記J個の対応付けの解から、K組(Kは2以上かつJ以下の整数)の対応付けの解を選択する選択ステップと、
前記第1コンピュータが、(K-M)組の対応付けの解と、前記現フレームについての前記物体領域情報とを用いて、次フレーム内の前記ターゲットが存在する領域を表す前記予測情報の生成に用いるための前記現フレームについての前記対象領域情報として、(K-M)組の前記対象領域情報を生成する生成ステップと、
前記複数のフレームに対して、前記検出ステップと、前記予測ステップと、前記最適化処理ステップと、前記選択ステップと、前記生成ステップと、を順次実行させるステップと、
を含む追跡方法。
【請求項7】
時系列で取得された複数のフレーム内のターゲットを追跡するコンピュータ(100)が実行するプログラムであって、
前記コンピュータに、
現フレームに基づいて前記現フレーム内の物体が存在する領域を表す物体領域情報(D1)を出力する検出手順と、
前フレーム内で検出されたターゲットが存在する領域を表す対象領域情報(D3)を用いて、前記現フレーム内で前記ターゲットが存在すると予測される領域を表す予測情報(D2)を出力する予測手順と、
量子インスパイアードマシン(170)に対して、前記物体領域情報と前記予測情報とを用いて、前記現フレーム内で検出された前記ターゲットと予測ターゲットとの対応付けの解を得る最適化処理を、複数の異なる探索条件の下でJ回(Jは2以上の整数)実行させ、J個の対応付けの解をそれぞれに対応するコスト関数の評価値とともに出力させる最適化処理手順と、
前記コスト関数の評価値に基づいて前記J個の対応付けの解から、K組(Kは2以上かつJ以下の整数)の対応付けの解を選択する選択手順と、
前記(K-M)組(Mは0以上の整数)の対応付けの解と、前記現フレームについての前記物体領域情報とを用いて、次フレーム内の前記ターゲットが存在する領域を表す前記予測情報の生成に用いるための前記現フレームについての前記対象領域情報として、(K-M)組の前記対象領域情報を生成する生成手順と、
前記複数のフレームに対して、前記検出手順と、前記予測手順と、前記最適化処理手順と、前記選択手順と、前記生成手順と、を順次実行させる手順と、
を実行させるためのプログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、追跡システム、追跡方法、および、プログラムに関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
特許文献1には、複数のフレーム画像を用いて移動する物体を追跡する技術について記載されている。
【先行技術文献】
【特許文献】
【0003】
特開2011-181014号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
時系列で取得された画像を用いて、移動する2以上の物体を追跡する場合、追跡の対象の外観の類似度合い、および、追跡の対象の動きによっては、直前に取得された画像における物体と今回取得された画像における同じ物体とが正しく対応付けられないことがある。マッチングにミスが生じてしまうと、正確な追跡結果を得られなくなる。画像間の追跡の対象の対応付けの正確さを向上できる技術が求められていた。
【課題を解決するための手段】
【0005】
本開示の一形態によれば、追跡システム(10)が提供される。この追跡システムは、時系列で取得された複数のフレーム内のターゲットを追跡する。この追跡システムは、現フレームに基づいて前記現フレーム内の物体が存在する領域を表す物体領域情報(D1)を出力する検出部(210)と、前フレーム内で検出されたターゲットが存在する領域を表す対象領域情報(D3)を用いて、前記現フレーム内で前記ターゲットが存在すると予測される領域を表す予測情報(D2)を出力する予測部(220)と、前記物体領域情報と前記予測情報とを用いて、前記現フレーム内で検出された前記ターゲットと予測ターゲットとの対応付けの解を得る最適化処理を、複数の異なる探索条件の下でJ回(Jは2以上の整数)実行し、J個の対応付けの解をそれぞれに対応するコスト関数の評価値とともに出力する最適化処理部(70)と、前記コスト関数の評価値に基づいて前記J個の対応付けの解から、K組(Kは2以上かつJ以下の整数)の対応付けの解を選択する選択部(240)と、(K-M)組(Mは0以上の整数)の対応付けの解と、前記現フレームについての前記物体領域情報とを用いて、次フレーム内の前記ターゲットが存在する領域を表す前記予測情報の生成に用いるための前記現フレームについての前記対象領域情報として、(K-M)組の前記対象領域情報を生成する生成部(250)と、前記検出部と、前記予測部と、前記最適化処理部と、前記選択部と、前記生成部と、にそれぞれの処理を前記複数のフレームについて順次実行させる制御部(260)と、
を備える追跡システム。
【0006】
現フレーム内で検出されたターゲットと予測ターゲットとの対応付けについて、1つの解のみを求める態様では、その対応付けに誤りが生じた場合、以降のフレームにおけるターゲットの対応付けの処理で誤りを修正できない。しかしながら、上記の形態によれば、現フレーム内で検出されたターゲットと予測ターゲットとの対応付けの複数の対応付けの解に基づいて、次フレーム内のターゲットが存在する領域について複数のパターンを予測する。よって、ターゲットの対応付けに誤りが生じた場合でも、以降のフレームについての各部における処理により、対応付けの誤りの修正が可能である。したがって、フレーム間の追跡の対象の対応付けの正確さを向上できる。
【図面の簡単な説明】
【0007】
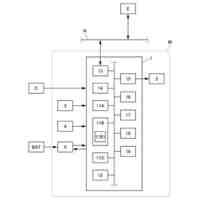
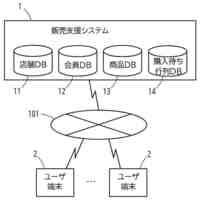
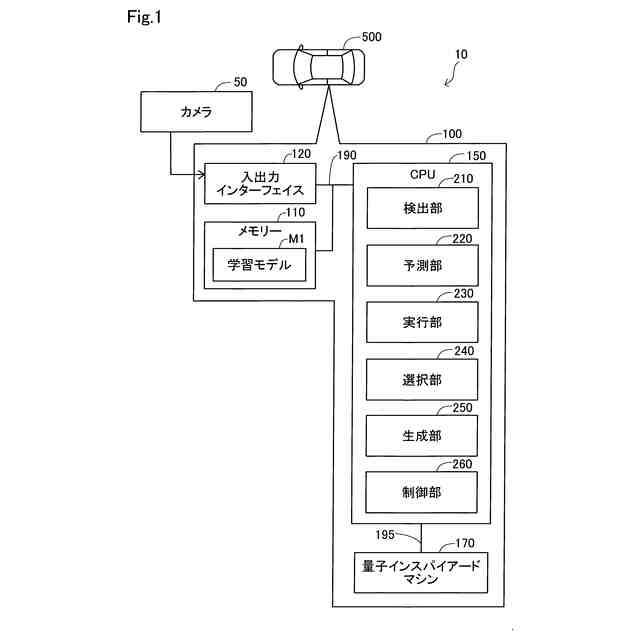
物体追跡システムの概略構成を表すブロック図である。
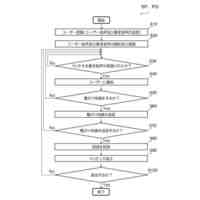
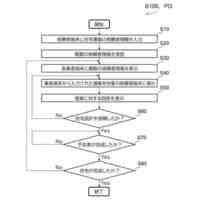
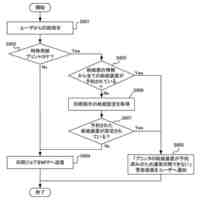
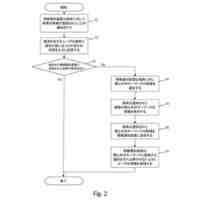
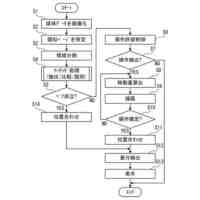
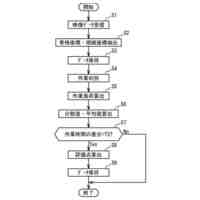
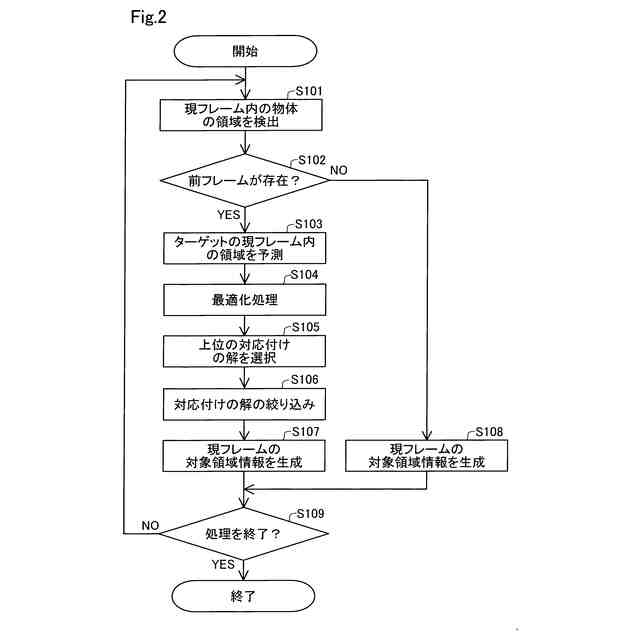
ターゲットを追跡する処理のフローチャートである。
物体領域情報についての説明図である。
対象領域情報についての説明図である。
予測情報についての説明図である。
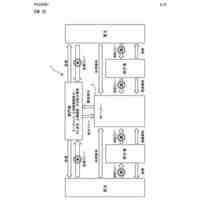
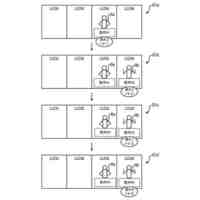
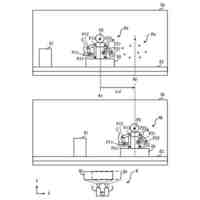
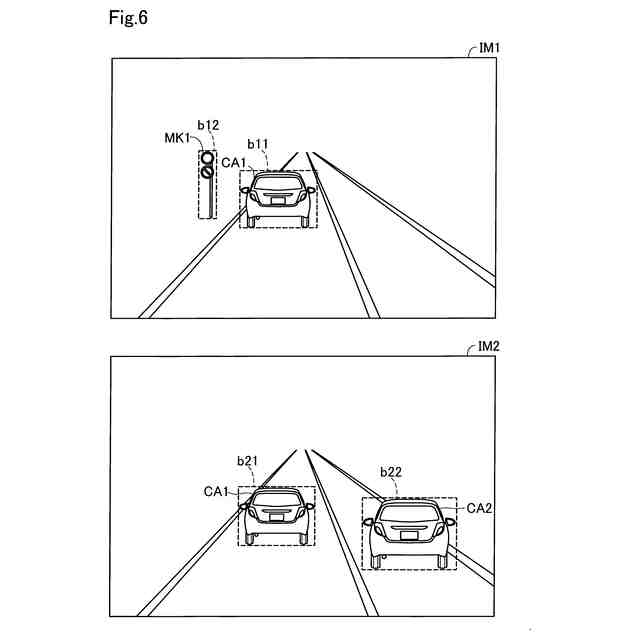
連続したフレームの例を示す図である。
【発明を実施するための形態】
【0008】
A.実施形態:
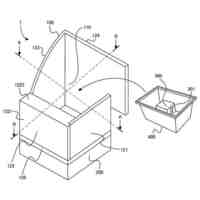
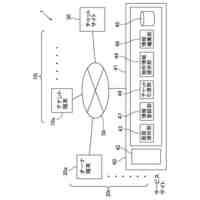
図1に示すように、物体追跡システム10は、車両500に備えられた画像センサにより時系列で取得された複数のフレーム内の対象物を追跡する。対象物は、四輪車、二輪車、自転車、電動カート、車椅子、歩行者等である。車両500は、ADAS(Advanced Driving Assistant System: 先進運転システム)による走行が可能である。物体追跡システム10を追跡システムともよぶ。
【0009】
物体追跡システム10は、カメラ50と、追跡装置100と、を備える。カメラ50と、追跡装置100とは、車両500に搭載されている。
【0010】
カメラ50は車両500に備えられた画像センサである。カメラ50は、車両500のフロントガラスの上端近傍に設置されている単眼カメラである。カメラ50は、あらかじめ決められたフレームレートで車両500の前方の決められた範囲を撮像する。撮像された個々のフレームは、ノンインタレース方式で表示可能な静止画像である。カメラ50は、フレームのデータを追跡装置100に出力する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
情報提示方法
8日前
個人
プログラム
今日
個人
アカウントマップ
1日前
個人
自動精算システム
16日前
個人
RFタグ読取装置
25日前
個人
プログラム
7日前
個人
売買システム
22日前
個人
管理サーバ
1か月前
個人
発想支援方法及びシステム
11日前
個人
市場受発注システム
14日前
日本精機株式会社
車両用表示装置
24日前
日本精機株式会社
車両用表示装置
24日前
個人
学習装置及び推論装置
今日
個人
分類処理プログラム及び方法
11日前
井関農機株式会社
ロボット作業車両
16日前
富士通株式会社
金融システム
8日前
個人
VRによる人体各部位の立体化
1か月前
キヤノン株式会社
情報処理装置
1か月前
株式会社プレニーズ
仲介システム
1日前
トヨタ自動車株式会社
作業管理装置
14日前
ブラザー工業株式会社
無線通信装置
14日前
個人
販売支援システム
16日前
トヨタ自動車株式会社
情報通知方法
14日前
トヨタ自動車株式会社
画像処理装置
1か月前
村田機械株式会社
人員配置システム
11日前
トヨタ自動車株式会社
記号識別方法
1か月前
トヨタ自動車株式会社
作業評価装置
23日前
個人
情報処理装置およびプログラム
1か月前
トヨタ自動車株式会社
生成装置
8日前
AICRO株式会社
情報処理システム
14日前
トヨタ自動車株式会社
習熟度判定装置
1か月前
NISSHA株式会社
入力装置
11日前
大王製紙株式会社
RFIDタグ
1か月前
株式会社半導体エネルギー研究所
検索システム
14日前
中国電力株式会社
業務依頼支援システム
16日前
株式会社JVCケンウッド
情報処理装置
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ