TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025014646
公報種別
公開特許公報(A)
公開日
2025-01-30
出願番号
2023117371
出願日
2023-07-19
発明の名称
自動運転情報算出システム、及び自動運転情報算出方法
出願人
株式会社安藤・間
,
コベルコ建機株式会社
代理人
弁理士法人 武政国際特許商標事務所
主分類
E02F
9/20 20060101AFI20250123BHJP(水工;基礎;土砂の移送)
要約
【課題】本願発明の課題は、従来技術が抱える問題を解決することであり、すなわち「作業機材」の挙動を指定するだけで所定の動作をする自動運転情報算出システムと、その自動運転に必要な情報を出力する自動運転情報算出方法を提供することである。
【解決手段】本願発明の自動運転情報算出システムは、建設機械を自動運転させるための情報を求めるシステムであって、中継情報算出手段を備えたものである。作業機材は、所定の作業用途を実現するものであり、中継情報算出手段は、入力された作業機材に係る「機材挙動情報」に基づいて中継機構の「機構動作情報」を算出する手段である。機材挙動情報は、作機材位置情報と機材姿勢情報、経過時刻からなる複数の「ポイント挙動情報」を含む。
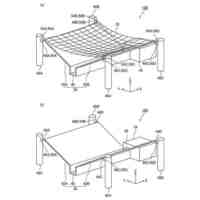
【選択図】図4
特許請求の範囲
【請求項1】
建設機械を自動運転させるための情報を求めるシステムであって、
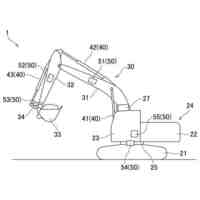
前記建設機械は、本体部と、該本体部に取り付けられる中継機構と、該中継機構に取り付けられる作業機材と、を含んで構成され、
前記作業機材は、前記建設機械の作業用途を実現する機能を有し、
前記中継機構は、前記作業機材の挙動を制御する機能を有し、
前記作業機材に係る機材挙動情報に基づいて、前記中継機構の機構動作情報を算出する中継情報算出手段を、備え、
前記機材挙動情報は、前記作業機材のうちあらかじめ設定された特定点に係る機材位置情報、該作業機材の姿勢を示す機材姿勢情報、及び経過時刻からなる複数のポイント挙動情報を含み、
前記機材位置情報は、前記本体部のうちあらかじめ設定された基準点を原点とする座標系における3次元座標であり、
前記中継情報算出手段は、前記ポイント挙動情報の前記経過時刻において、前記作業機材が該ポイント挙動情報の前記機材位置情報と前記機材姿勢情報に適合するように、前記機構動作情報を算出する、
ことを特徴とする自動運転情報算出システム。
続きを表示(約 1,200 文字)
【請求項2】
機構制御手段を有する前記建設機械を、さらに備え
前記機構制御手段は、前記中継情報算出手段によって算出された前記機構動作情報に基づいて、前記中継機構を制御する、
ことを特徴とする請求項1記載の自動運転情報算出システム。
【請求項3】
前記建設機械が油圧ショベルであって、
前記作業機材が、地盤を掘削し、又は土砂を積み込むためのバケットであり、
前記中継機構は、アーム、ブーム、及び油圧シリンダを含んで構成され、
前記機構制御手段は、前記油圧シリンダを制御することによって、前記機構動作情報に適合するように前記作業機材を制御する、
ことを特徴とする請求項2記載の自動運転情報算出システム。
【請求項4】
前記中継情報算出手段は、前記中継機構の旋回が拘束されたことを条件として、前記機構動作情報を算出する、
ことを特徴とする請求項1記載の自動運転情報算出システム。
【請求項5】
前記中継情報算出手段は、前記中継機構が旋回可能であることを条件として、前記機構動作情報を算出する、
ことを特徴とする請求項1記載の自動運転情報算出システム。
【請求項6】
建設機械を自動運転させるための情報を求める方法であって、
前記建設機械は、本体部と、該本体部に取り付けられる中継機構と、該中継機構に取り付けられる作業機材と、を含んで構成され、
前記作業機材は、前記建設機械の作業用途を実現する機能を有し、
前記中継機構は、前記作業機材の挙動を制御する機能を有し、
前記作業機材に係る機材挙動情報を設定する挙動情報設定工程と、
前記機材挙動情報に基づいて、前記中継機構の機構動作情報を算出する中継情報算出工程と、を備え、
前記機材挙動情報は、前記作業機材のうちあらかじめ設定された特定点の機材位置情報、該作業機材の姿勢を示す機材姿勢情報、及び経過時刻からなる複数のポイント挙動情報を含み、
前記機材位置情報は、前記本体部のうちあらかじめ設定された基準点を原点とする座標系における3次元座標であり、
前記中継情報算出工程では、前記ポイント挙動情報の前記経過時刻において、前記作業機材が該ポイント挙動情報の前記機材位置情報と前記機材姿勢情報に適合するように、前記機構動作情報を算出する、
ことを特徴とする自動運転情報算出方法。
【請求項7】
オペレータが前記建設機械を操作しながら、前記ポイント挙動情報を取得するポイント挙動情報取得工程を、さらに備え、
前記挙動情報設定工程では、前記ポイント挙動情報取得工程で取得された前記ポイント挙動情報に基づいて、前記機材挙動情報を設定する、
ことを特徴とする請求項6記載の自動運転情報算出方法。
発明の詳細な説明
【技術分野】
【0001】
本願発明は、建設機械の自動運転に関する技術であり、より具体的には、油圧ショベルにおけるバケットなどその建設機械の作業用途を実現する機材の位置や角度を用いて自動運転を行う建設機械と、自動運転に必要な情報を出力するプログラムに関するものである。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
近年、建設業界における人手不足の問題が深刻化しており、行政が計画している工事の遂行にも少なからず影響を及ぼしている。他方、災害現場や事故現場など人が立ち入るには危険な場所で施工することもあるが、その場合の安全対策は極めて慎重に行わなければならない。このような背景のもと、さらに情報通信技術や測位技術の飛躍的な進歩もあって、無人の建設機械によって施工を行う「無人施工」が実用化されるようになってきた。
【0003】
この無人施工は、遠隔操作形式と自動運転形式に大別することができる。遠隔操作形式は、人が建設機械から離れた位置に立ち、無線操作送信機を操作することによって建設機械を操る手法であり、一方の自動運転形式は、一連の作業を指令する処理が組み込まれたプログラムを、コンピュータが実行することによって建設機械が自動的に稼働する手法である。
【0004】
建設機械による自動化施工に関しては、これまでにも様々な技術が提案されており、例えば特許文献1では、いわゆるティーチングデータとプレーバックによる手法を利用し、トラックの進入に応じて所定の作業を自動的に行う油圧ショベルについて提案している。
【先行技術文献】
【特許文献】
【0005】
特開平10-183665号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献1をはじめ従来の自動運転に係る技術は、特定の建設機械を対象とするものであった。すなわち、その建設機械に特有の諸条件やパラメータに基づいて当該建設機械が所定の動作を行うように計算し、そのうえで自動運転用のプログラムを作成していた。したがって、同種の建設機械、つまりその作業用途を実現するための機材(以下、「作業機材」という。)が共通する建設機械どうしでも、それぞれ建設機械ごとに計算し、プログラムを作成する必要があった。例えば、バケット(作業機械)を有するという点で共通する同じバックホウであっても、メーカーや仕様(バケット容量など)が異なれば、それぞれバックホウごとに自動運転用のプログラムを作成しなければならないわけである。
【0007】
また従来技術では、建設機械を構成する種々の機材を対象としたうえで、その建設機械が所定の動作を行うように計算していた。例えば特許文献1では、旋回体とブーム、アーム、バケットを対象とし、それぞれの角度などを算出したうえで、プログラムを作成することとしていた。この場合、その計算が煩雑であるうえ、建設機械の安定性や効率など考えると実際には実施しないような動作を指示したり、あるいは論理的には可能であっても現実的には実施できない動作を指示したりすることが考えられる。
【0008】
本願発明の課題は、従来技術が抱える問題を解決することであり、すなわち「作業機材」の挙動を指定するだけで所定の動作をする自動運転情報算出システムと、その自動運転に必要な情報を出力する自動運転情報算出方法を提供することである。
【課題を解決するための手段】
【0009】
本願発明は、同種の建設機械に共通する「作業機材」の挙動を指定することによって、種々の建設機械の自動運転に共通して利用することができる、という点に着目してなされたものであり、これまでにない発想に基づいて行われた発明である。
【0010】
本願発明の自動運転情報算出システムは、建設機械を自動運転させるための情報を求めるシステムであって、中継情報算出手段を備えたものである。なお、この建設機械は、本体部と、本体部に取り付けられる中継機構、中継機構に取り付けられる作業機材を含んで構成される。また作業機材は、建設機械の作業用途を実現する機能を有するもので、中継機構は、作業機材の挙動を制御する機能を有するものである。中継情報算出手段は、作業機材に係る「機材挙動情報」に基づいて中継機構の「機構動作情報」を算出する手段である。機材挙動情報は、作業機材のうちあらかじめ設定された特定点に係る「機材位置情報」と、作業機材の姿勢を示す「機材姿勢情報」、「経過時刻」からなる複数の「ポイント挙動情報」を含む。また機材位置情報は、本体部のうちあらかじめ設定された基準点を原点とする座標系における3次元座標である。そして中継情報算出手段が、ポイント挙動情報の経過時刻において、作業機材がポイント挙動情報の機材位置情報と機材姿勢情報に適合するように機構動作情報を算出する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社安藤・間
移動式架台
2か月前
株式会社安藤・間
柱梁接合構造
1か月前
株式会社安藤・間
柱梁接合部構造
1か月前
株式会社安藤・間
構造物の健全性評価方法
1日前
株式会社安藤・間
プレキャストコンクリート基礎梁構造
22日前
プルガティオ株式会社
除菌システム
1か月前
プルガティオ株式会社
除菌システム
1か月前
太平洋マテリアル株式会社
床形成方法
1か月前
株式会社安藤・間
バイオマス焼却灰含有組成物およびその硬化体
23日前
株式会社安藤・間
自動運転情報算出システム、及び自動運転情報算出方法
1か月前
株式会社安藤・間
柱梁接合部プレキャストコンクリート部材および柱梁接合部構造
1か月前
太平洋マテリアル株式会社
下地材及び自己平滑性モルタルの連続施工方法
1か月前
株式会社高橋監理
不同沈下修正機
15日前
個人
潜水式土運船と土砂降ろし方法
15日前
大和クレス株式会社
斜樋管保護部材
23日前
カナデビア株式会社
サクション基礎
15日前
株式会社大林組
建築物の基礎構造及び方法
1日前
埼玉八栄工業株式会社
地盤撹拌装置
8日前
株式会社オーイケ
擁壁および基礎ブロック
15日前
株式会社竹内製作所
作業用車両
5日前
株式会社竹内製作所
作業用車両
5日前
五洋建設株式会社
鋼管矢板の接合方法
29日前
日本国土開発株式会社
堆積物移動装置
22日前
株式会社竹内製作所
作業用車両
1日前
コベルコ建機株式会社
作業機械
22日前
株式会社本久
砂防ソイルセメント材の品質管理方法
5日前
日本車輌製造株式会社
杭打機の制御システム
22日前
株式会社小松製作所
作業機械
22日前
株式会社CSPホールディングス
杭抜き方法
1日前
日立建機株式会社
建設機械
1日前
アロン化成株式会社
排水設備用蓋
15日前
日立建機株式会社
建設機械
1日前
株式会社みどり工学研究所
上下動抑制埋設支柱及び埋設工法
1日前
日立建機株式会社
作業機械
1日前
日立建機株式会社
作業機械
1日前
株式会社鴻池組
地盤締固め工法
23日前
続きを見る
他の特許を見る









 特許ウォッチ
特許ウォッチ