TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025014344
公報種別
公開特許公報(A)
公開日
2025-01-30
出願番号
2023116830
出願日
2023-07-18
発明の名称
位置情報取得システム、位置情報取得方法、及びプログラム
出願人
トヨタ自動車株式会社
代理人
個人
主分類
G06Q
50/04 20120101AFI20250123BHJP(計算;計数)
要約
【課題】複数のデバイスを設け、作業位置に応じて最適なデバイスを自動選択することによりデータ取得のロバスト性及び精度を確保することができる位置情報取得システムを提供する。
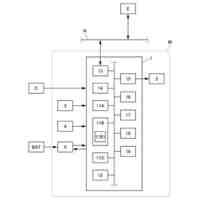
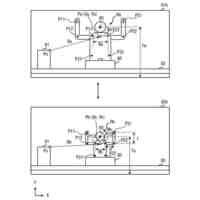
【解決手段】対象物に対して動作する複数のセンサまたは作業デバイスから位置情報を取得する位置情報取得部と、対象物の周辺領域を分割した分割領域に応じて位置情報を取得する前記センサまたはデバイスを切り替える切り替え部と、を備える、位置情報取得システムを提供する。
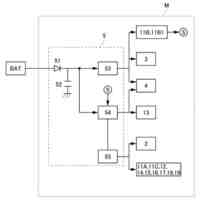
【選択図】図16
特許請求の範囲
【請求項1】
対象物に対して動作する複数のセンサまたはデバイスから位置情報を取得する位置情報取得部と、
前記対象物の周辺領域を分割した分割領域に応じて前記位置情報を取得する前記センサまたはデバイスを切り替える切り替え部と、を備える、位置情報取得システム。
続きを表示(約 670 文字)
【請求項2】
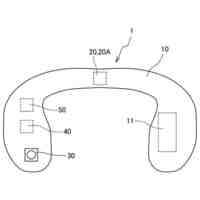
前記分割領域は、前記対象物から離れた対象物離隔領域と、前記対象物と接する対象物接近領域と、対象物内領域である、請求項1に記載の位置情報取得システム。
【請求項3】
前記対象物離隔領域は、インドアGPS(Global Positioning System)またはIMU(Inertial Measurement Unit)で前記位置情報が取得され、
前記対象物接近領域は、画像骨格推定、IMUまたはインドアGPSで前記位置情報が取得され、
前記対象物内領域は、IMUまたはインドアGPSで前記位置情報が取得される、請求項2に記載の位置情報取得システム。
【請求項4】
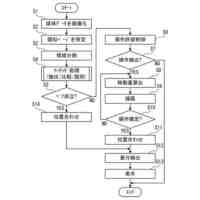
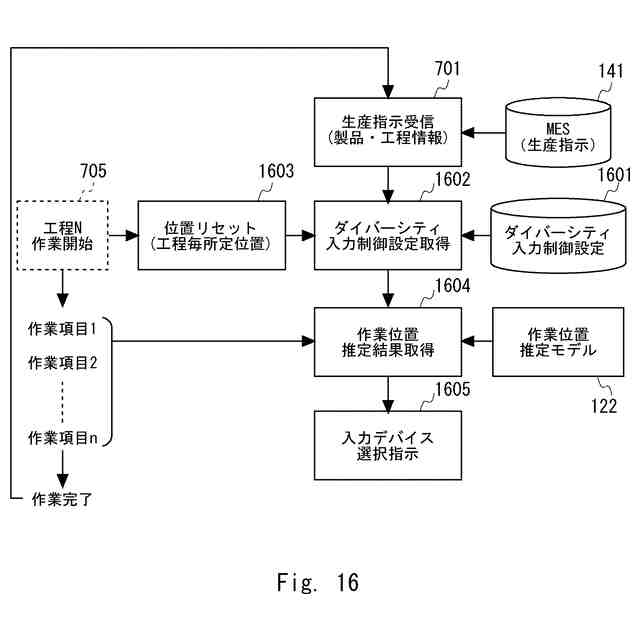
さらに、生産指示を受信する受信部と、
前記生産指示に従って複数の前記センサまたはデバイスの入力制御設定が取得される、入力制御設定取得部と、を備える、請求項1乃至3のいずれか1項に記載の位置情報取得システム。
【請求項5】
対象物に対して動作する複数のセンサまたはデバイスから位置情報を取得し、
前記対象物の周辺領域を分割した分割領域に応じて前記位置情報を取得する前記センサまたはデバイスを切り替える、位置情報取得方法。
【請求項6】
対象物に対して動作する複数のセンサまたはデバイスから位置情報を取得し、
前記対象物の周辺領域を分割した分割領域に応じて前記位置情報を取得する前記センサまたはデバイスを切り替えることを情報処理装置に実行させるプログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、位置情報取得システム、位置情報取得方法、及びプログラムに関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
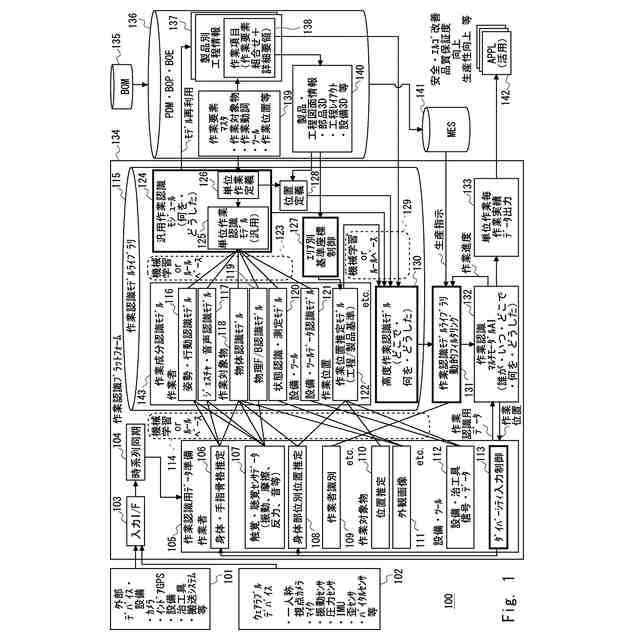
センサにより作業者の体情報と物体を認識し、作業と関連付ける作業認識方法が特許文献1に記載されている。特許文献1の作業認識システムは、センサデータを取得するセンサデータ取得部と、センサデータに基づき、作業者の体の部位を検出して作業者の体の部位に関する体部位情報を取得する体部位情報取得部を備える。また、作業認識システムは、センサデータに基づき、物体を検出して物体に関する物体情報を取得する物体情報取得部と、体部位情報と、物体情報とに基づき、物体と、物体を用いた作業を行った作業者の体の部位との関連付けを行う関連付け部を備える。さらに、作業認識システムは、関連付け部で関連付けられた関連付け結果に関する関連付け情報に基づき、作業者によって実施された作業を認識する認識結果分析部を備える。
【先行技術文献】
【特許文献】
【0003】
国際公開第2018/087844号
【発明の概要】
【発明が解決しようとする課題】
【0004】
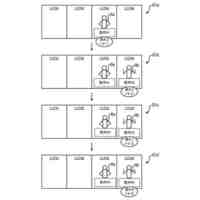
カメラ、GPS、IMU等のデバイスを使って作業実績データを取得する場合、工程及び製品との位置関係によっては、カメラの死角など障害物などでデバイスが使用できないまたはGPSの電波の反射・遮蔽等正確に機能しないことがある。そのため、複数デバイスからの入力を機械学習したモデルまたはルールベースにて作業を認識する作業認識システムにおいて、各種作業環境・条件下でのデータ取得のロバスト性の確保が困難になる虞がある。そこで本開示の目的は、複数のデバイスを設け、作業位置に応じて最適なデバイスを自動選択することによりデータ取得のロバスト性及び精度を確保することができる位置情報取得システムを提供することである。
【課題を解決するための手段】
【0005】
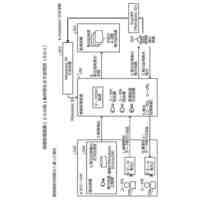
本開示の位置情報取得システムは、
対象物に対して動作する複数のセンサまたはデバイスから位置情報を取得する位置情報取得部と、
前記対象物の周辺領域を分割した分割領域に応じて前記位置情報を取得する前記センサまたはデバイスを切り替える切り替え部と、を備える、位置情報取得システムである。
【0006】
上記構成により、複数のデバイスを設け、作業位置に応じて最適なデバイスを自動選択することによりデータ取得のロバスト性及び精度を確保することができる位置情報取得システムを提供できる。
【0007】
本開示の位置情報取得システムは、
前記分割領域は、前記対象物から離れた対象物離隔領域と、前記対象物と接する対象物接近領域と、対象物内領域である、ことを特徴とする。
【0008】
上記構成により、周辺領域を対象物遠接近領域と、対象物近接近領域と、対象物内領域に分割できる。
【0009】
本開示の位置情報取得システムは、
前記対象物離隔領域は、インドアGPS(Global Positioning System)またはIMU(Inertial Measurement Unit)で前記位置情報が取得され、
前記対象物接近領域は、画像骨格推定、IMUまたはインドアGPSで前記位置情報が取得され、
前記対象物内領域は、IMUまたは画像骨格推定で前記位置情報が取得される、ことを特徴とする。
【0010】
上記構成により、分割領域に応じてインドアGPSと画像骨格推定とIMUでそれぞれの手段の精度及び信頼性を考慮した優先度とバックアップのロジックにより臨機応変に最適な手段を選択し、ロバスト性を確保することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
情報提示方法
18日前
個人
自動精算システム
26日前
個人
プログラム
17日前
個人
プログラム
10日前
個人
RFタグ読取装置
1か月前
個人
アカウントマップ
11日前
個人
売買システム
1か月前
個人
管理サーバ
1か月前
個人
発想支援方法及びシステム
21日前
個人
市場受発注システム
24日前
個人
分類処理プログラム及び方法
21日前
個人
学習装置及び推論装置
10日前
日本精機株式会社
車両用表示装置
1か月前
日本精機株式会社
車両用表示装置
1か月前
個人
VRによる人体各部位の立体化
1か月前
富士通株式会社
金融システム
18日前
株式会社発明屋
電池指向の構造設計
4日前
井関農機株式会社
ロボット作業車両
26日前
キヤノン株式会社
情報処理装置
1か月前
トヨタ自動車株式会社
推定装置
1か月前
個人
未来型家系図構築システム
1か月前
株式会社SEKT
文字認識装置
1か月前
トヨタ自動車株式会社
管理装置
5日前
富士通株式会社
プロセッサ
3日前
株式会社プレニーズ
仲介システム
11日前
トヨタ自動車株式会社
表認識装置
1か月前
トヨタ自動車株式会社
情報通知方法
24日前
トヨタ自動車株式会社
作業評価装置
1か月前
トヨタ自動車株式会社
画像処理装置
1か月前
トヨタ自動車株式会社
作業管理装置
24日前
富士通株式会社
情報処理プログラム
1か月前
ダイハツ工業株式会社
移動支援装置
1か月前
村田機械株式会社
人員配置システム
21日前
ブラザー工業株式会社
無線通信装置
24日前
個人
情報処理装置およびプログラム
1か月前
トヨタ自動車株式会社
記号識別方法
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ