TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025014106
公報種別
公開特許公報(A)
公開日
2025-01-29
出願番号
2024082835
出願日
2024-05-21
発明の名称
機械学習評価パイプラインのシステム及び方法
出願人
ウーブン・バイ・トヨタ株式会社
代理人
個人
,
個人
,
個人
,
個人
,
個人
,
個人
主分類
G06N
3/0985 20230101AFI20250122BHJP(計算;計数)
要約
【課題】ニューラルアーキテクチャ探索(NAS)パイプラインのための方法等の提供。
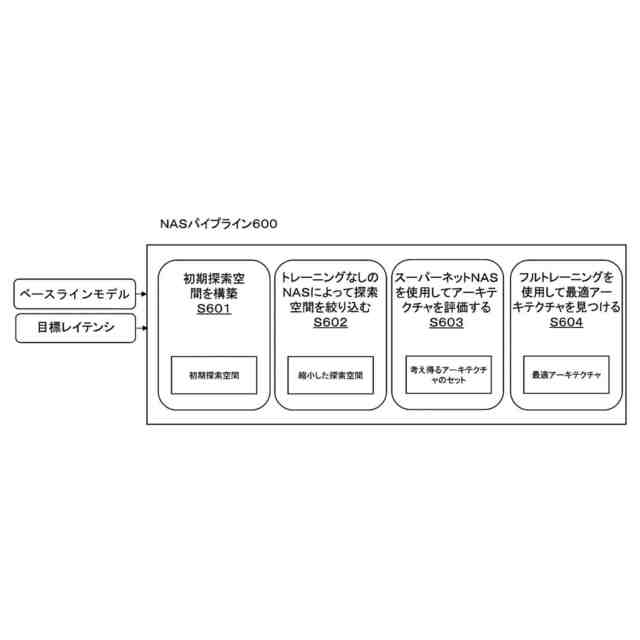
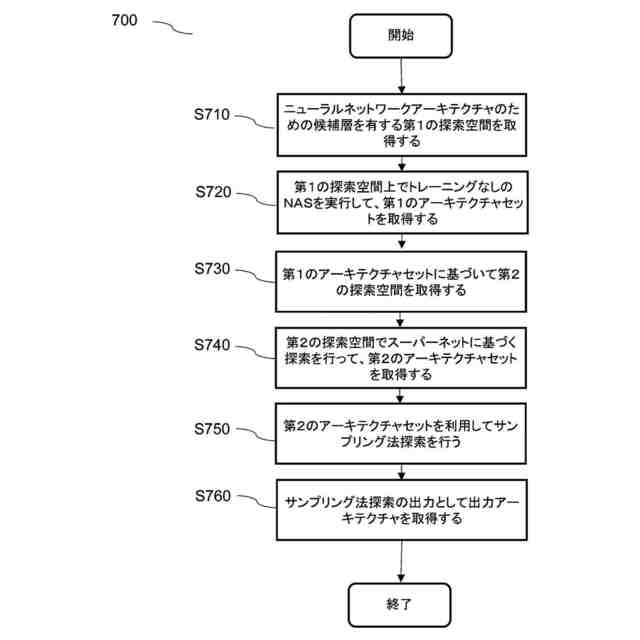
【解決手段】最適化されたニューラルアーキテクチャ探索(NAS)を行うためのニューラルアーキテクチャ探索(NAS)パイプラインのための方法、システム、及びデバイスが提供される。この方法は、ニューラルネットワークアーキテクチャのための複数の候補層を含む第1の探索空間を取得することと、第1のアーキテクチャセットを取得するために、第1の探索空間内でトレーニングなしのNASを行うことと、第1の探索空間内でトレーニングなしのNASを行って第2のアーキテクチャセットを取得することと、第2の探索空間内で勾配に基づく探索を行って第2のアーキテクチャセットを取得することと、第2のアーキテクチャセットを初期サンプルとして利用してサンプリング法探索を行うことと、サンプリング法探索の出力として出力アーキテクチャを取得することと、を含む。
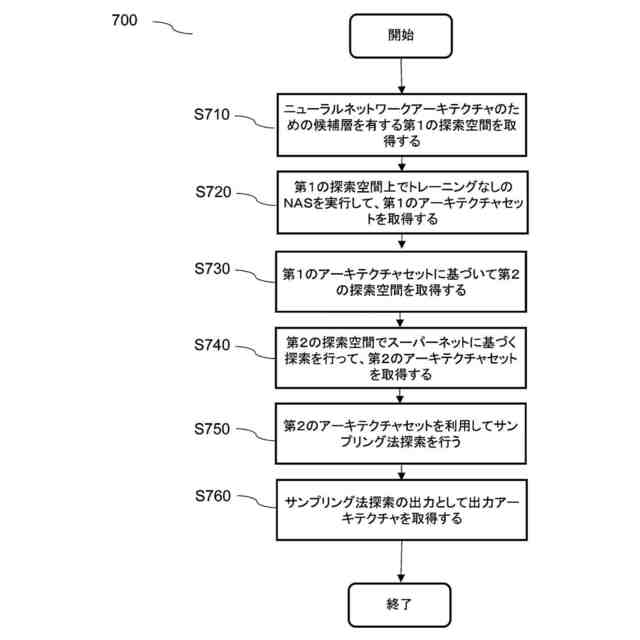
【選択図】図7
特許請求の範囲
【請求項1】
ニューラルアーキテクチャ探索(NAS)を行うための方法であって、
ニューラルネットワークアーキテクチャのための複数の候補層を含む第1の探索空間を取得することと、
前記第1の探索空間内でトレーニングなしのNASを行って第1のアーキテクチャセットを取得することと、
前記第1のアーキテクチャセットに基づいて第2の探索空間を取得することと、
前記第2の探索空間内で勾配に基づく探索を行って第2のアーキテクチャセットを取得することと、
前記第2のアーキテクチャセットを初期サンプルとして利用してサンプリング法探索を行うことと、
前記サンプリング法探索の出力として出力アーキテクチャを取得すことと、
を含む方法。
続きを表示(約 970 文字)
【請求項2】
前記第1の探索空間は、アーキテクチャパラメータのセットに基づいて取得される、請求項1に記載の方法。
【請求項3】
前記第2の探索空間は、前記第1のアーキテクチャセット内の1つ以上のアーキテクチャを含むサブ空間に基づいて取得される、請求項1又は2に記載の方法。
【請求項4】
前記サンプリング法探索は繰り返して行われる、請求項1又は2に記載の方法。
【請求項5】
前記サンプリング法探索は進化的探索アルゴリズムを含む、請求項4に記載の方法。
【請求項6】
前記サンプリング法探索の繰り返し回数は所定の閾値に基づく、請求項5に記載の方法。
【請求項7】
前記トレーニングなしのNASは1つ以上のメトリクスに基づいて行われる、請求項1又は2に記載の方法。
【請求項8】
ニューラルアーキテクチャ探索(NAS)を行うための装置であって、
コンピュータ実行可能命令を記憶した少なくとも1つのメモリと、
少なくとも1つのプロセッサと、を備え、
前記プロセッサは、前記コンピュータ実行可能命令を実行して、
ニューラルネットワークアーキテクチャのための複数の候補層を含む第1の探索空間を取得し、
前記第1の探索空間内でトレーニングなしのNASを行って第1のアーキテクチャセットを取得し、
前記第1のアーキテクチャセットに基づいて第2の探索空間を取得し、
前記第2の探索空間内で勾配に基づく探索を行って第2のアーキテクチャセットを取得し、
前記第2のアーキテクチャセットを初期サンプルとして利用してサンプリング法探索を行い、
前記サンプリング法探索の出力として出力アーキテクチャを取得する、ように構成されている、
装置。
【請求項9】
前記第1の探索空間は、アーキテクチャパラメータのセットに基づいて取得される、請求項8に記載の装置。
【請求項10】
前記第2の探索空間は、前記第1のアーキテクチャセット内の1つ以上のアーキテクチャを含むサブ空間に基づいて取得される、請求項8又は9に記載の装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示の例示的な実施形態によるシステム及び方法は、機械学習モデルを評価するためのパイプラインを提供することに関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
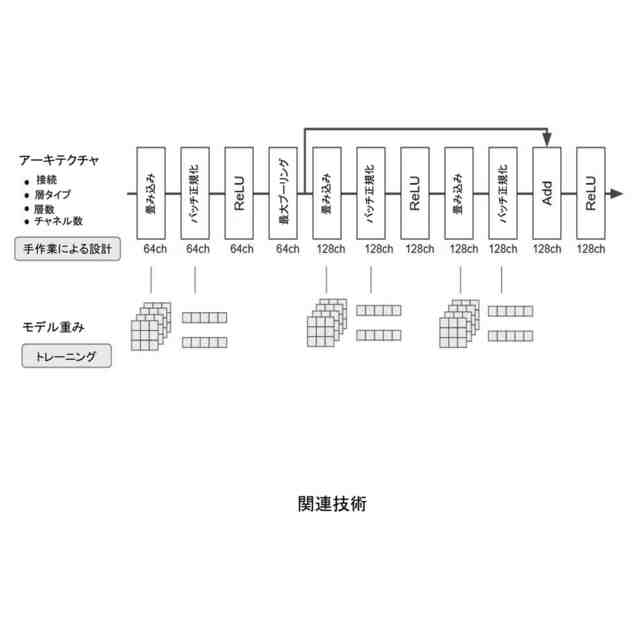
関連技術では、ニューラルネットワークは概して、(1)ニューラルネットワークのアーキテクチャ、及び(2)ニューロン間で伝送される入力に適用される重み、の2つの主なパラメータによって特徴付けられ得る。典型的には、アーキテクチャはユーザによって手動、すなわち手作業で設計され、重みは、トレーニングセット及びニューラルネットワークアルゴリズムを用いてネットワークをトレーニングすることによって最適化される。よって、ニューラルネットワークの性能を最適化するには、アーキテクチャ設計は、特にニューラルネットワークが使用のためにデプロイされた後には概して静的であるので、重要な考慮事項である。図1は、関連技術のニューラルネットワークアーキテクチャの一例を示す図である。
【0003】
図1を参照すると、関連技術のニューラルネットワークアーキテクチャ例は、接続、層のタイプ(又は動作)、層数、及び各層内のチャネル数によって定義される。層タイプには、例えば、畳み込み(畳み込みニューラルネットワーク(Convolutional Neural Network:CNN)の場合)、活性化(例えば、ReLU(Rectified Linear Unit:整流線形ユニット))、プーリング(pooling)、全結合(fully connected)、バッチ正規化(batch normalization)、ドロップアウト(dropout)などが含まれ得、ネットワークのアーキテクチャ設計は、これらの層タイプのうち少なくともいくつかに対応する層の組み合わせによって具現される。
【0004】
関連技術において、ニューラルネットワークのアーキテクチャを自動的に設計するための技法として、NAS(Neural Architecture Search:ニューラルアーキテクチャ探索)がある。NASを行うための関連技術の方法には、トレーニングなし(ゼロショット)NAS、スーパーネットに基づくNAS、及び単純な繰り返し探索が含まれ得る。
【0005】
関連技術では、トレーニングなし(ゼロショット)NASは、ネットワークパラメータをトレーニングすることなくネットワーク性能を予測する。この方法は高速であるが、良好な精度を有さないこともある。例えば、この方法は、実際にトレーニングを行うことなく、探索空間内のメトリクス又はアーキテクチャを評価することによってなされ得る。
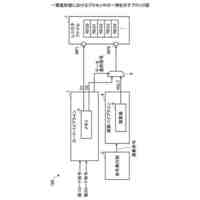
【0006】
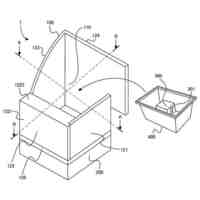
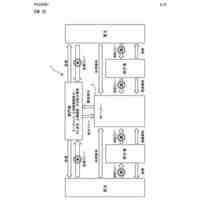
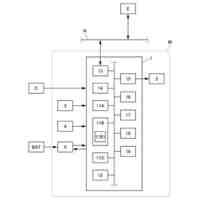
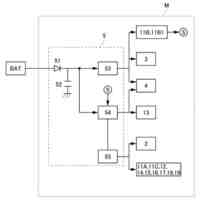
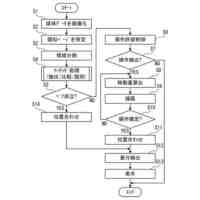
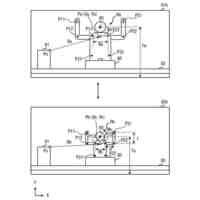
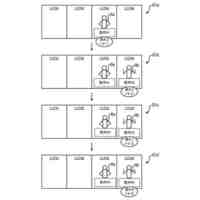
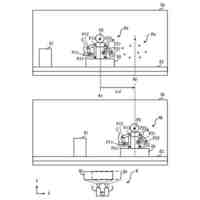
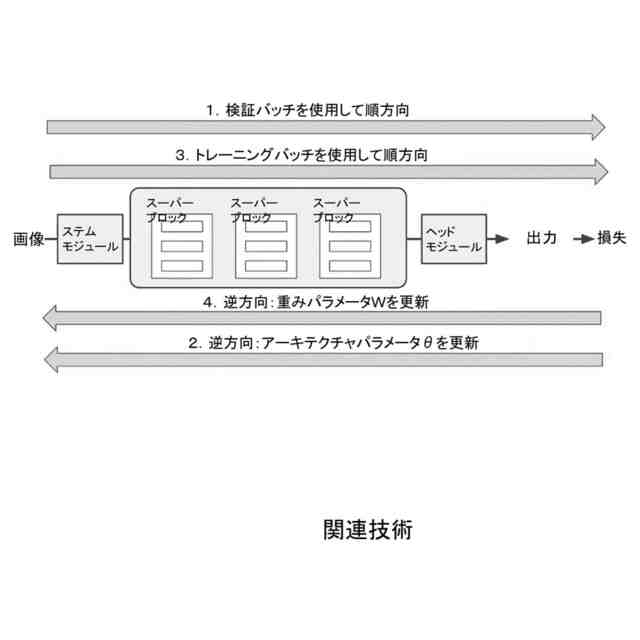
図2は、関連技術に係るスーパーネットに基づく(勾配に基づく)NASを示す図である。図3はスーパーネットに基づくNASにおけるスーパーブロックの一例を示し、図4は関連技術に係るスーパーネットに基づくNAS法の流れの一例を示す。
【0007】
スーパーネットに基づく(勾配に基づく)NASは、スーパーネットを使用し得る。スーパーネットとは、全ての候補アーキテクチャからなるネットワークである。図2を参照すると、スーパーネットに基づく探索は、複数の接続したスーパーブロックを1回だけトレーニングするプロセスを介してニューラルネットワークアーキテクチャを探索し、各スーパーブロックは1つの層(及び/又は層のセット)に対応し、候補層(及び/又は層のセット)の多くの選択肢を含む。例えば、選択肢1は3×3CNN、選択肢2は5×5CNN、選択肢3は最大プーリング又は残差ブロック、などであってもよい。スーパーネットに基づく探索では、各スーパーブロックで最良の層が探索され、選択される。図3及び図4に示すように、各候補はθ値(又はアーキテクチャパラメータ)を有し、その値はトレーニングプロセスを介して更新される。すなわち、ある候補が損失の低減に有意に寄与したと判定されると、その候補のθ値(候補層の重要性を表す)が誤差逆伝播法(back propagation)を通して増大され、逆もまた同様である。スーパーネットに基づく探索のひとつの繰り返しにおいてアーキテクチャパラメータθが更新された後、トレーニング画像(例えば、車の画像)を使用して重みパラメータが更新される。このプロセスが、ある程度のネットワーク安定度に達する(すなわち、ある程度のレイテンシ(推論時間)又は損失に達する)まで、又は所定数の繰り返しが完了するまで反復される。トレーニングが完了すると、最終的な(最適な)ネットワークアーキテクチャを生成するために、各スーパーブロックについて最良層(すなわち、最高のθ値を有する層)が選択される。
【0008】
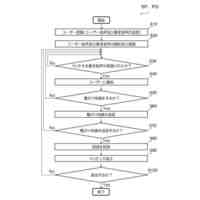
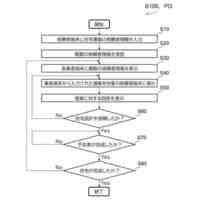
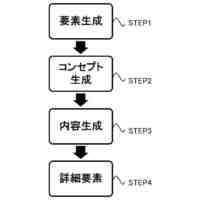
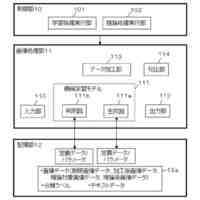
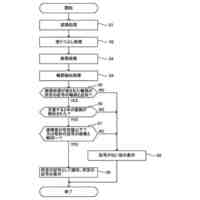
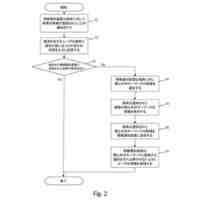
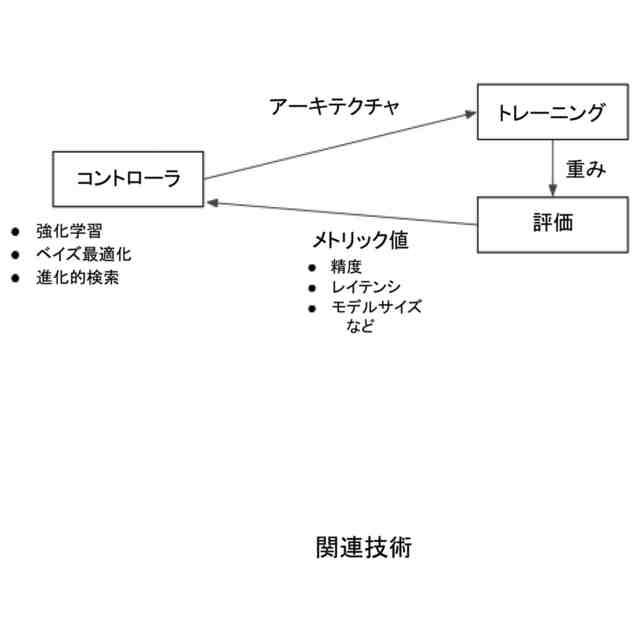
図5は、関連技術に係るサンプリング法の機能ブロック図である。図5を参照すると、このサンプリング法は繰り返しプロセスであり、そのプロセスによってコントローラがサンプルアーキテクチャ候補を(例えば層のセットからなる探索空間から)生成する。サンプルアーキテクチャは、トレーニングを介して最適化され、メトリクス値(例えば、精度、レイテンシ、モデルサイズなど)を得るために評価される。コントローラは次いで、前のサンプルの評価結果に基づき、強化学習、ベイズ最適化、進化的アルゴリズムなどの方法を用いて次のサンプルアーキテクチャ候補を生成する。このプロセスが、目標性能に達するまで(例えば、目標精度、目標レイテンシ、目標モードサイズなどが得られるまで)反復して行われる。
【0009】
図5に例示するサンプリング法は、最も正確/最適なアーキテクチャをもたらし得るが、多くのトレーニングを伴うため、大量の候補にわたって行うには非常に時間がかかる。
【0010】
NASを手動で行う(関連技術のシステムでは一般的であるように)と、より高品質のアーキテクチャが確実に得られる場合があるが、非常に時間がかかり、ユーザに負担をかける。よって、NASを自動化することが望ましい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
情報提示方法
18日前
個人
アカウントマップ
11日前
個人
プログラム
10日前
個人
自動精算システム
26日前
個人
プログラム
17日前
個人
RFタグ読取装置
1か月前
個人
売買システム
1か月前
個人
管理サーバ
1か月前
個人
市場受発注システム
24日前
個人
発想支援方法及びシステム
21日前
日本精機株式会社
車両用表示装置
1か月前
日本精機株式会社
車両用表示装置
1か月前
個人
分類処理プログラム及び方法
21日前
個人
学習装置及び推論装置
10日前
井関農機株式会社
ロボット作業車両
26日前
個人
VRによる人体各部位の立体化
1か月前
株式会社発明屋
電池指向の構造設計
4日前
富士通株式会社
金融システム
18日前
トヨタ自動車株式会社
推定装置
1か月前
キヤノン株式会社
情報処理装置
1か月前
個人
未来型家系図構築システム
1か月前
トヨタ自動車株式会社
管理装置
5日前
富士通株式会社
プロセッサ
3日前
株式会社プレニーズ
仲介システム
11日前
トヨタ自動車株式会社
記号識別方法
1か月前
ブラザー工業株式会社
無線通信装置
24日前
トヨタ自動車株式会社
画像処理装置
1か月前
ダイハツ工業株式会社
移動支援装置
1か月前
トヨタ自動車株式会社
情報通知方法
24日前
トヨタ自動車株式会社
作業評価装置
1か月前
個人
情報処理装置およびプログラム
1か月前
個人
販売支援システム
26日前
富士通株式会社
情報処理プログラム
1か月前
トヨタ自動車株式会社
作業管理装置
24日前
トヨタ自動車株式会社
作業評価装置
1か月前
村田機械株式会社
人員配置システム
21日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ