TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025012070
公報種別
公開特許公報(A)
公開日
2025-01-24
出願番号
2023114613
出願日
2023-07-12
発明の名称
計算機システム及び計画の評価方法
出願人
株式会社日立製作所
代理人
藤央弁理士法人
主分類
G06Q
10/06 20230101AFI20250117BHJP(計算;計数)
要約
【課題】放射線の被ばくの危険性がある空間の作業の計画立案において、計画に基づく作業のシミュレーションの正確性を担保し、計画を評価する。
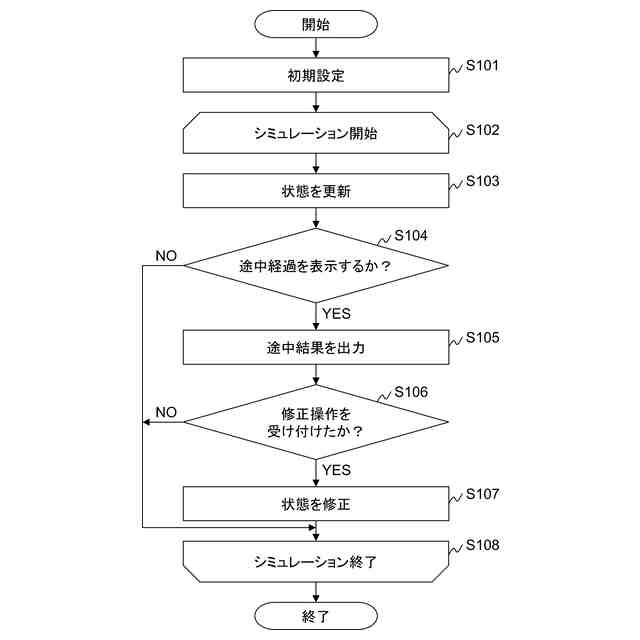
【解決手段】放射線の被ばくの危険性がある空間で行われる作業の計画を評価するシステムは、複数の作業から構成される計画を含むシミュレーション実行指示を受け付け、計画に基づいて、仮想的な作業空間における作業者の作業のシミュレーションを実行し、シミュレーションの結果に基づいて、計画の評価指標を算出する。計算機システムは、シミュレーションにおいて、タイムステップごとに、状態の更新を実行し、所定のタイムステップ数ごとに、最新の状態を出力し、状態の修正を受け付ける。
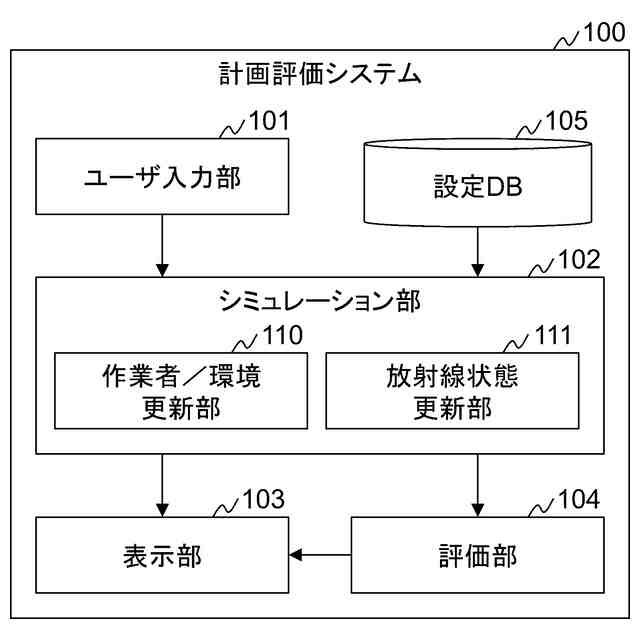
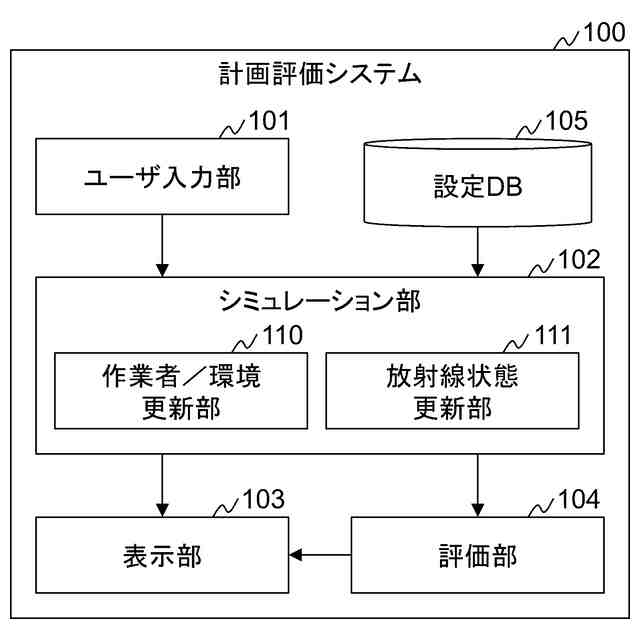
【選択図】図1
特許請求の範囲
【請求項1】
放射線の被ばくの危険性がある空間で行われる作業の計画を評価する計算機システムであって、
プロセッサ、前記プロセッサに接続される記憶装置、及び前記プロセッサに接続され、外部装置と接続するインタフェースを備え、
前記プロセッサは、
複数の作業から構成される計画を含むシミュレーション実行指示を受け付け、前記記憶装置に前記計画を格納し、
前記計画に基づいて、仮想的な作業空間における作業者の作業のシミュレーションを実行し、前記シミュレーションの実行結果を前記記憶装置に格納し、
前記シミュレーションの実行結果に基づいて、前記計画の評価指標を算出し、前記記憶装置に格納し、
前記プロセッサは、前記シミュレーションにおいて、
タイムステップごとに、前記作業者の作業状態、前記作業者の身体状態、前記作業空間に配置された物体の状態、前記作業空間の放射線の線量分布、及び前記作業空間の放射線の遮蔽領域の更新を実行し、前記更新の結果を前記記憶装置に格納し、
所定のタイムステップ数ごとに、前記インタフェースを介して、最新の前記作業者の作業状態、最新の前記作業者の身体状態、最新の前記作業空間に配置された物体の状態、最新の前記作業空間の放射線の線量分布、及び最新の前記作業空間の放射線の遮蔽領域を出力し、前記インタフェースを介して、前記作業者の作業状態及び身体状態、前記作業空間に配置された物体の状態、並びに、前記作業空間の放射線の線量分布及び遮蔽領域の少なくともいずれかの修正を受け付けることを特徴とする計算機システム。
続きを表示(約 2,200 文字)
【請求項2】
請求項1に記載の計算機システムであって、
前記プロセッサは、前記シミュレーションにおいて、所定のタイムステップ数ごとに、最新の前記作業者の作業状態、最新の前記作業者の身体状態、最新の前記作業空間に配置された物体の状態、最新の前記作業空間の放射線の線量分布、及び最新の前記作業空間の放射線の遮蔽領域に基づいて前記計画の評価指標を算出し、前記インタフェースを介して前記計画の評価指標を出力することを特徴とする計算機システム。
【請求項3】
請求項2に記載の計算機システムであって、
前記作業者の身体状態は、前記作業者の放射線の被ばく量を含み、
前記プロセッサは、前記作業者の作業状態、前記作業空間の放射線の線量分布、及び前記作業空間の放射線の遮蔽領域に基づいて、前記作業者の被ばく量を算出することを特徴とする計算機システム。
【請求項4】
請求項2に記載の計算機システムであって、
前記プロセッサは、前記シミュレーションにおいて、
所定のタイムステップ数ごとに、前記計画の評価指標に基づいて、最終的な前記計画の評価指標を推定し、
前記インタフェースを介して、推定された前記計画の評価指標及び閾値の比較結果を出力することを特徴とする計算機システム。
【請求項5】
請求項2に記載の計算機システムであって、
前記プロセッサは、前記作業者の疲労度、前記作業者の被ばく量、前記計画の作業の達成度、及び前記計画の無駄を表す冗長度を前記計画の評価指標として算出することを特徴とする計算機システム。
【請求項6】
計算機システムが実行する、放射線の被ばくの危険性がある空間で行われる作業の計画の評価方法であって、
前記計算機システムは、プロセッサ、前記プロセッサに接続される記憶装置、及び前記プロセッサに接続され、外部装置と接続するインタフェースを有し、
前記計画の評価方法は、
前記プロセッサが、複数の作業から構成される計画を含むシミュレーション実行指示を受け付け、前記記憶装置に前記計画を格納する第1のステップと、
前記プロセッサが、前記計画に基づいて、仮想的な作業空間における作業者の作業のシミュレーションを実行し、前記シミュレーションの実行結果を前記記憶装置に格納する第2のステップと、
前記プロセッサが、前記シミュレーションの実行結果に基づいて、前記計画の評価指標を算出し、前記記憶装置に格納する第3のステップと、
を含み、
前記第2のステップは、
前記プロセッサが、タイムステップごとに、前記作業者の作業状態、前記作業者の身体状態、前記作業空間に配置された物体の状態、前記作業空間の放射線の線量分布、及び前記作業空間の放射線の遮蔽領域の更新を実行し、前記更新の結果を前記記憶装置に格納するステップと、
前記プロセッサが、所定のタイムステップ数ごとに、前記インタフェースを介して、最新の前記作業者の作業状態、最新の前記作業者の身体状態、最新の前記作業空間に配置された物体の状態、最新の前記作業空間の放射線の線量分布、及び最新の前記作業空間の放射線の遮蔽領域を出力し、前記インタフェースを介して、前記作業者の作業状態及び身体状態、前記作業空間に配置された物体の状態、並びに、前記作業空間の放射線の線量分布及び遮蔽領域の少なくともいずれかの修正を受け付けるステップと、を含むことを特徴とする計画の評価方法。
【請求項7】
請求項6に記載の計画の評価方法であって、
前記第2のステップは、前記プロセッサが、前記シミュレーションにおいて、所定のタイムステップ数ごとに、最新の前記作業者の作業状態、最新の前記作業者の身体状態、最新の前記作業空間に配置された物体の状態、最新の前記作業空間の放射線の線量分布、及び最新の前記作業空間の放射線の遮蔽領域に基づいて前記計画の評価指標を算出し、前記インタフェースを介して前記計画の評価指標を出力するステップを含むことを特徴とする計画の評価方法。
【請求項8】
請求項7に記載の計画の評価方法であって、
前記作業者の身体状態は、前記作業者の放射線の被ばく量を含み、
前記第2のステップは、前記プロセッサが、前記作業者の作業状態、前記作業空間の放射線の線量分布、及び前記作業空間の放射線の遮蔽領域に基づいて、前記作業者の被ばく量を算出するステップを含むことを特徴とする計画の評価方法。
【請求項9】
請求項7に記載の計画の評価方法であって、
前記第2のステップは、
前記プロセッサが、所定のタイムステップ数ごとに、前記計画の評価指標に基づいて、最終的な前記計画の評価指標を推定するステップと、
前記プロセッサが、前記インタフェースを介して、推定された前記計画の評価指標及び閾値の比較結果を出力するステップと、を含むことを特徴とする計画の評価方法。
【請求項10】
請求項7に記載の計画の評価方法であって、
前記第2のステップは、前記プロセッサが、前記作業者の疲労度、前記作業者の被ばく量、前記計画の作業の達成度、及び前記計画の無駄を表す冗長度を前記計画の評価指標として算出するステップを含むことを特徴とする計画の評価方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ユーザによる現場の作業計画立案を補助する技術に関するものである。
続きを表示(約 2,900 文字)
【背景技術】
【0002】
工事、保守作業、及び点検作業等では、効率性及び安全性の観点から、精度の高い計画の立案が求められる。原子力プラントの作業等、作業員に危険がおよぶ現場の作業では、正確な計画の立案の重要性が高い。そのため、事前に現場の細かな調査が行われ、原寸大のモックアップを用いた訓練/検証及び放射線シミュレータを用いた安全性評価が行われる。
【0003】
計画を評価する技術として非特許文献1及び非特許文献2に記載の技術が知られている。非特許文献1には、生産ラインの工程計画において、ラインのレイアウトや作業を仮想空間内に再現し、シミュレーションすることが記載されている。非特許文献2には、仮想空間内に放射線源を配置した場合の空間の放射線分布を算出することが記載されている。
【先行技術文献】
【非特許文献】
【0004】
“VPS GP4”、[online]、[令和5年6月30日検索]、インターネット<URL:https://www.fujitsu.com/jp/solutions/industry/manufacturing/monozukuri-total-support/products/plm-software/dmu/vps/gp4/>
Tatsuhiko Sato, Yosuke Iwamoto, Shintaro Hashimoto, Tatsuhiko Ogawa, Takuya Furuta, Shinichiro Abe, Takeshi Kai, Pi-En Tsai, Norihiro Matsuda, Hiroshi Iwase, Nobuhiro Shigyo, Lembit Sihver & Koji Niita (2018) Features of Particle and Heavy Ion Transport code System (PHITS) version 3.02, Journal of Nuclear Science and Technology, 55:6, 684-690, DOI: 10.1080/00223131.2017.1419890
【発明の概要】
【発明が解決しようとする課題】
【0005】
シミュレーションを実行するためには、事前に、作業内容、作業空間、及び状態変化の規則等に関する設定を正確に行う必要がある。しかし、様々なステークホルダが存在する作業の計画では全ての設定を完全に行うことは難しい。設定が不完全な状態でシミュレーションを実行すると、想定しない事象の発生等によって、シミュレーションの正確性が担保されない。作業者の高い安全性が求められる作業においては、シミュレーションの正確性が重要である。
【0006】
本発明は、放射線の被ばくの危険性がある空間の作業の計画立案において、計画に基づく作業のシミュレーションの正確性を担保し、計画を評価する技術を提供する。
【課題を解決するための手段】
【0007】
本願において開示される発明の代表的な一例を示せば以下の通りである。すなわち、放射線の被ばくの危険性がある空間で行われる作業の計画を評価する計算機システムであって、プロセッサ、前記プロセッサに接続される記憶装置、及び前記プロセッサに接続され、外部装置と接続するインタフェースを備え、前記プロセッサは、複数の作業から構成される計画を含むシミュレーション実行指示を受け付け、前記記憶装置に前記計画を格納し、前記計画に基づいて、仮想的な作業空間における作業者の作業のシミュレーションを実行し、前記シミュレーションの実行結果を前記記憶装置に格納し、前記シミュレーションの実行結果に基づいて、前記計画の評価指標を算出し、前記記憶装置に格納し、前記プロセッサは、前記シミュレーションにおいて、タイムステップごとに、前記作業者の作業状態、前記作業者の身体状態、前記作業空間に配置された物体の状態、前記作業空間の放射線の線量分布、及び前記作業空間の放射線の遮蔽領域の更新を実行し、前記更新の結果を前記記憶装置に格納し、所定のタイムステップ数ごとに、前記インタフェースを介して、最新の前記作業者の作業状態、最新の前記作業者の身体状態、最新の前記作業空間に配置された物体の状態、最新の前記作業空間の放射線の線量分布、及び最新の前記作業空間の放射線の遮蔽領域を出力し、前記インタフェースを介して、前記作業者の作業状態及び身体状態、前記作業空間に配置された物体の状態、並びに、前記作業空間の放射線の線量分布及び遮蔽領域の少なくともいずれかの修正を受け付ける。
【発明の効果】
【0008】
本発明によれば、正確性が担保されたシミュレーションの結果に基づいて計画を評価することができる。上記した以外の課題、構成及び効果は、以下の実施例の説明により明らかにされる。
【図面の簡単な説明】
【0009】
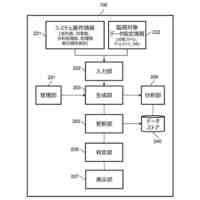
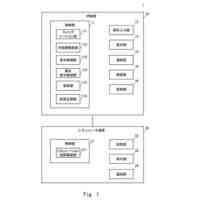
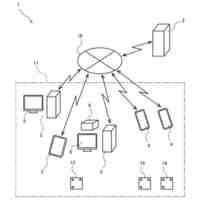
実施例1の計画評価システムの構成の一例を示す図である。
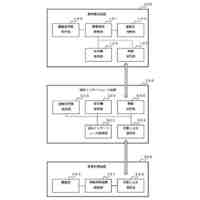
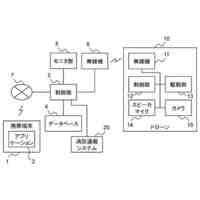
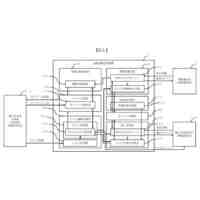
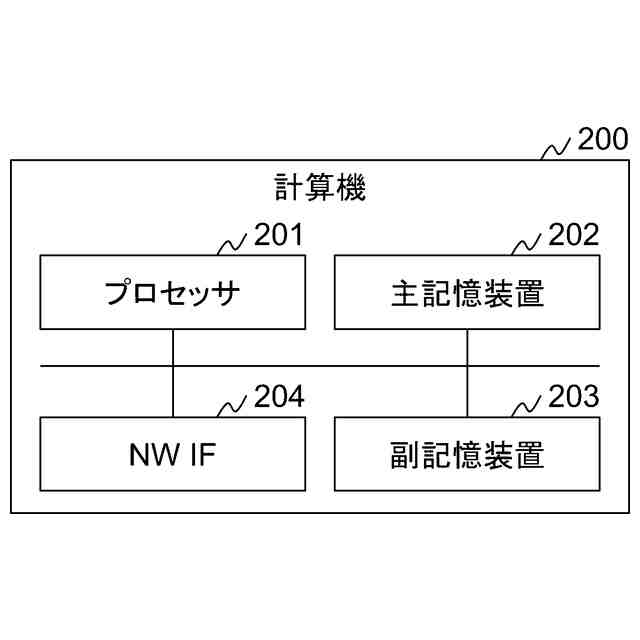
実施例1の計画評価システムを構成する計算機のハードウェア構成の一例を示す図である。
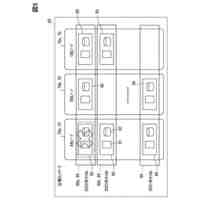
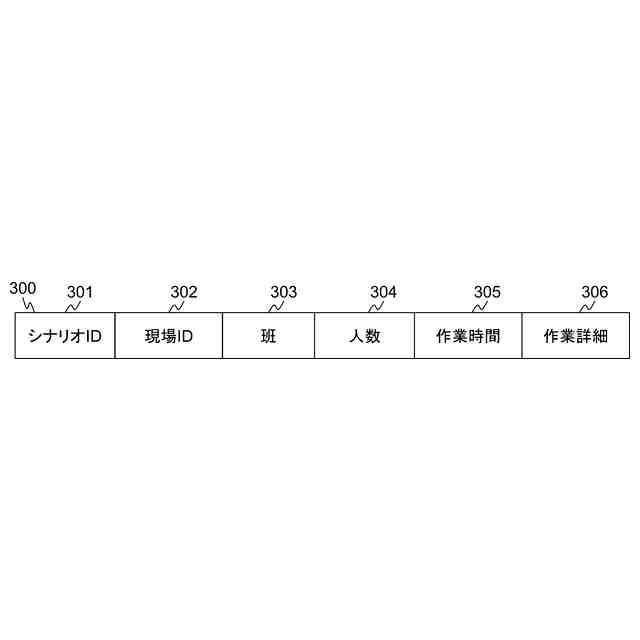
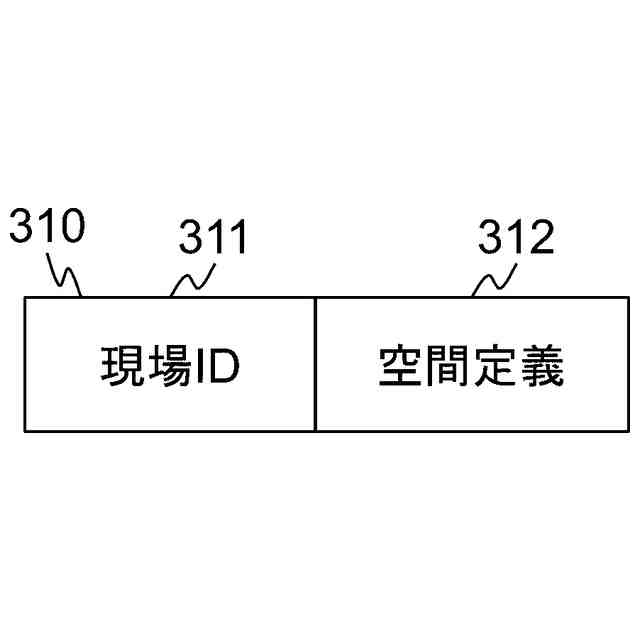
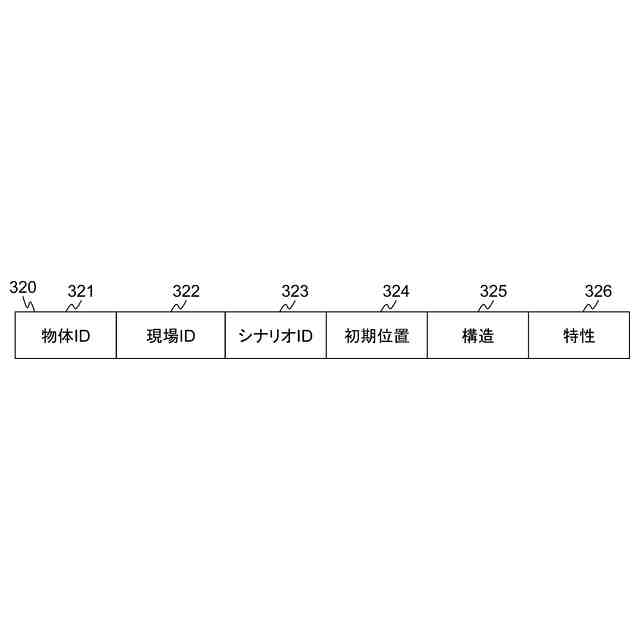
実施例1の設定DBに格納されるデータのデータ構造の一例を示す図である。
実施例1の設定DBに格納されるデータのデータ構造の一例を示す図である。
実施例1の設定DBに格納されるデータのデータ構造の一例を示す図である。
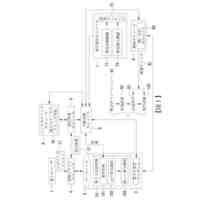
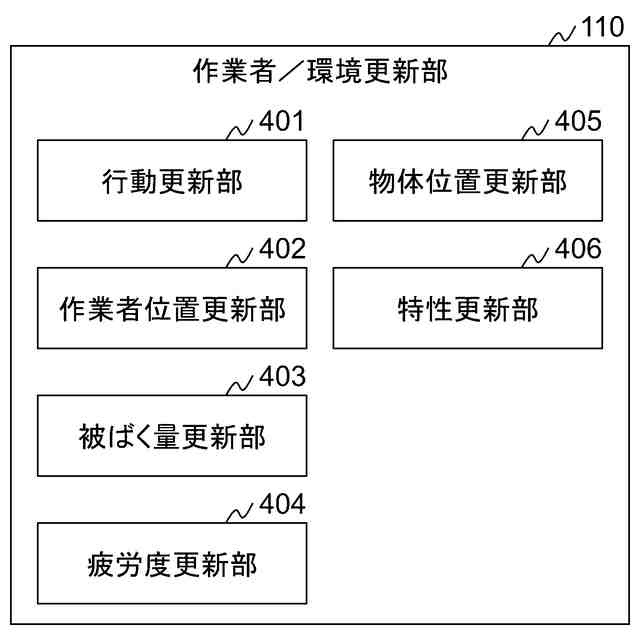
実施例1の作業者/環境更新部の機能構成の一例を示す図である。
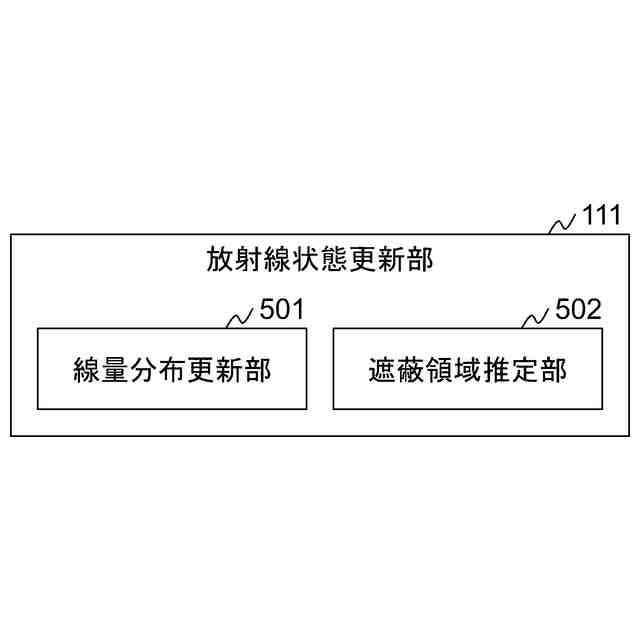
実施例1の放射線状態更新部の機能構成の一例を示す図である。
実施例1の評価部の機能構成の一例を示す図である。
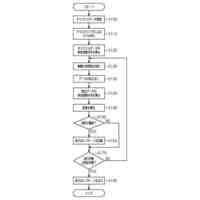
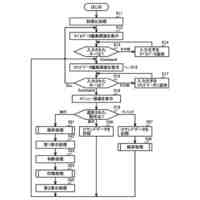
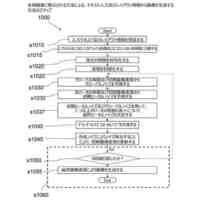
実施例1のシミュレーション部が実行する処理の一例を説明するフローチャートである。
実施例1の評価部が実行する処理の一例を説明するフローチャートである。
実施例2の評価部の機能構成の一例を示す図である。
実施例2のシミュレーション部が実行する処理の一例を説明するフローチャートである。
実施例2の評価部が実行する処理の一例を説明するフローチャートである。
実施例2の評価部が出力する評価値の時間推移の一例を示す図である。
実施例2の評価部が出力する評価値の時間推移の一例を示す図である。
実施例3の設定DBに格納されるデータのデータ構造の一例を示す図である。
【発明を実施するための形態】
【0010】
以下、図面を参照して本発明の実施形態を説明する。以下の記載及び図面は、本発明を説明するための例示であって、説明の明確化のため、適宜、省略及び簡略化がなされている。本発明は、他の種々の形態でも実施することが可能である。特に限定しない限り、各構成要素は単数でも複数でも構わない。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社日立製作所
生成支援プログラムおよび生成支援装置
2日前
株式会社日立製作所
地域情報管理装置、地域情報管理方法および地域情報管理プログラム
2日前
個人
非正規コート
12日前
個人
人物再現システム
9日前
個人
AI飲食最適化プラグイン
2日前
個人
電話管理システム及び管理方法
3日前
キヤノン電子株式会社
通信システム
23日前
有限会社ノア
データ読取装置
10日前
個人
広告提供システムおよびその方法
12日前
株式会社ザメディア
出席管理システム
17日前
個人
日誌作成支援システム
9日前
個人
ポイント還元付き配送システム
10日前
株式会社タクテック
商品取出集品システム
16日前
ミサワホーム株式会社
情報処理装置
16日前
トヨタ自動車株式会社
工程計画装置
17日前
トヨタ自動車株式会社
作業評価装置
23日前
トヨタ自動車株式会社
作業判定方法
18日前
オベック実業株式会社
接続構造
9日前
ゼネラル株式会社
RFIDタグ付き物品
19日前
個人
公益寄付インタラクティブシステム
23日前
トヨタ自動車株式会社
情報処理システム
18日前
株式会社村田製作所
動き検知装置
16日前
個人
コンテンツ配信システム
16日前
トヨタ自動車株式会社
情報処理方法
18日前
株式会社国際電気
支援システム
19日前
株式会社実身美
ワーキングシェアリングシステム
10日前
株式会社ドクター中松創研
生成AIの適切使用法
9日前
ブラザー工業株式会社
ラベルプリンタ
18日前
株式会社エスシーシー
置き配システム
10日前
個人
プラットフォームシステム
16日前
株式会社デンソー
情報処理方法
23日前
富士通株式会社
画像生成方法
22日前
トヨタ自動車株式会社
作業支援システム
16日前
株式会社 喜・扇
緊急事態対応円滑化システム
9日前
個人
注文管理システム及び注文管理プログラム
9日前
株式会社K-model
運用設計資料作成装置
12日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ