TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025010668
公報種別
公開特許公報(A)
公開日
2025-01-23
出願番号
2023112769
出願日
2023-07-10
発明の名称
車載自動運転装置および自動運転車両システム
出願人
三菱電機株式会社
代理人
弁理士法人ぱるも特許事務所
主分類
G08G
1/16 20060101AFI20250116BHJP(信号)
要約
【課題】車載センサの大型化、高コスト化を抑制しつつ、車載センサの検出距離の低下を招かずに、異なる自動運転車両の車載センサ間の相互干渉を防ぐことができる車載自動運転装置、および自動運転車両システムを提供する。
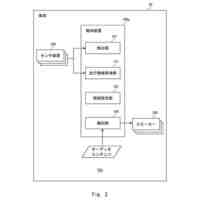
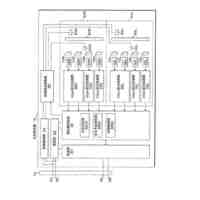
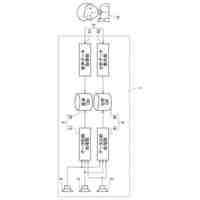
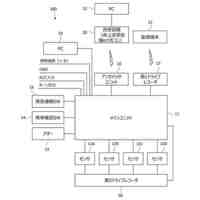
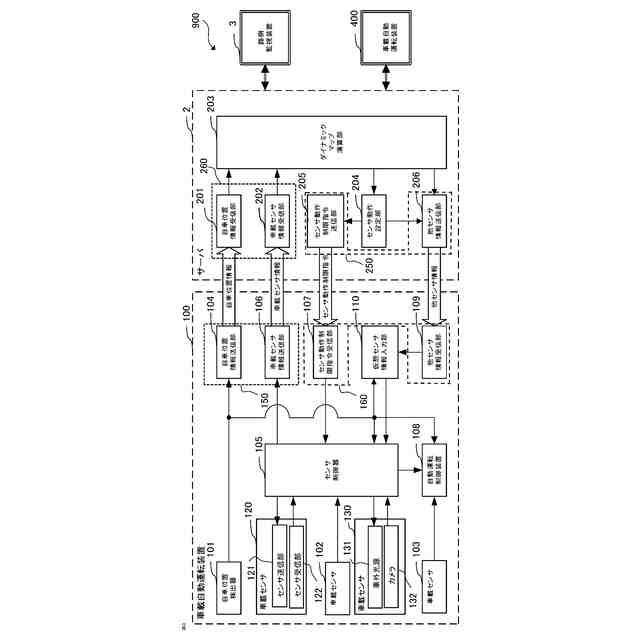
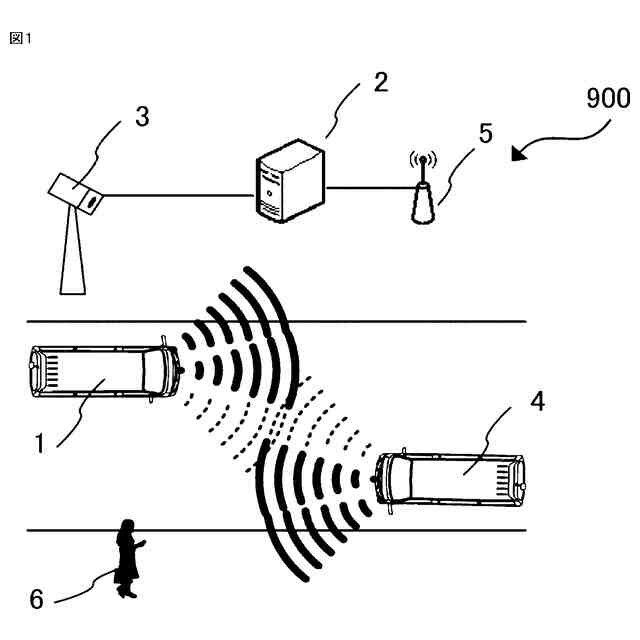
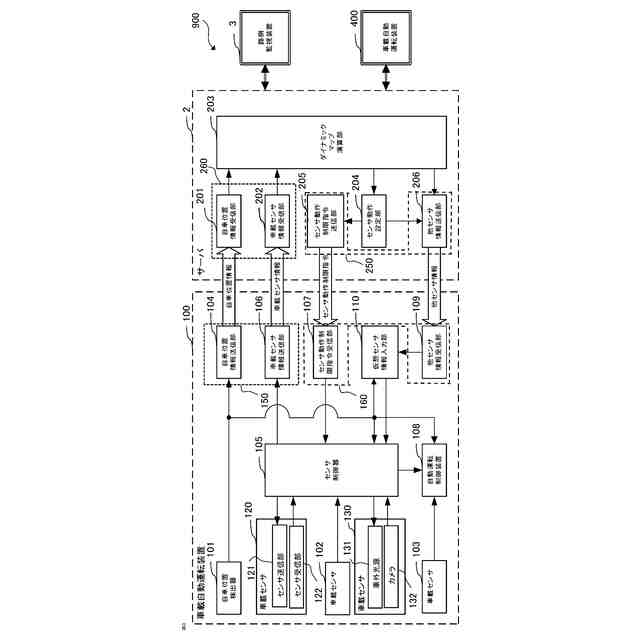
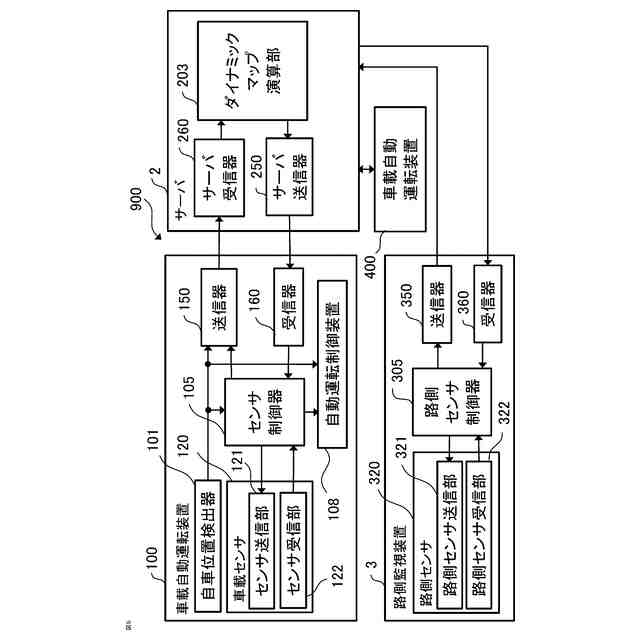
【解決手段】車載自動運転装置は、自車位置検出器、放射指令に基づいてセンサ用の送信波を放射するセンサ送信部とセンサ受信部とを有する車載センサ、センサ受信情報に加えて車載センサの特性についての情報を包含する車載センサ情報を出力し、センサ動作制限指令に基づいて放射指令を制限するセンサ制御器、送信器、センサ動作制限指令を受信する受信器、および、自車位置情報と、車載センサ情報を用いて自動運転を実施する自動運転制御装置が設けられたものである。自動運転車両システムは、複数の車載自動運転装置と管理用サーバを備えたものである。
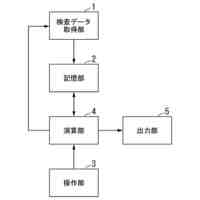
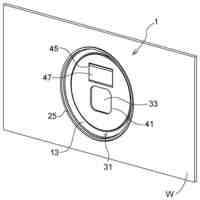
【選択図】図3
特許請求の範囲
【請求項1】
車両に搭載され前記車両の位置を検出して自車位置情報を出力する自車位置検出器、
放射指令を生成し前記放射指令に基づいて前記車両の周囲にセンサ用の送信波を放射するセンサ送信部と、車両の周囲の物体による前記送信波の反射波を受信するセンサ受信部とを有し、前記センサ受信部によって受信された前記車両の周囲の情報をセンサ受信情報として出力する車載センサ、
前記車載センサによって出力された前記センサ受信情報に加えて前記車載センサの取り付け位置と前記車載センサの特性についての情報を包含する車載センサ情報を出力し、センサ動作制限指令に基づいて前記放射指令を制限するセンサ制御器、
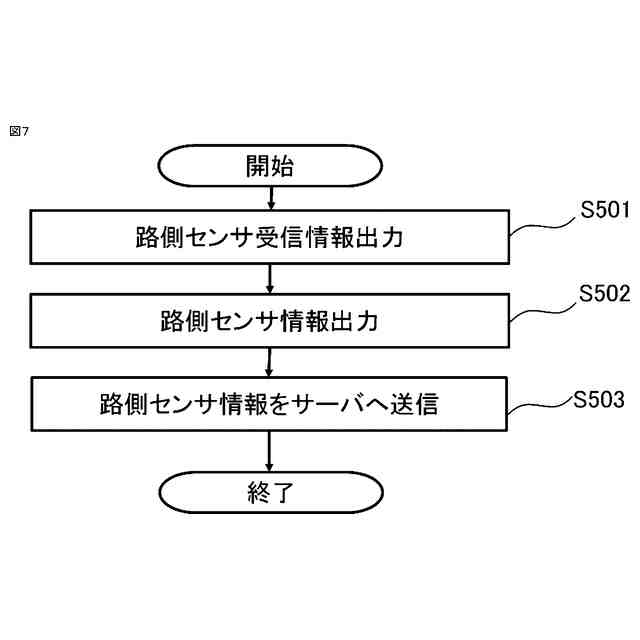
前記自車位置検出器によって出力された自車位置情報と、前記センサ制御器によって出力された前記車載センサ情報を車外へ送信する送信器、
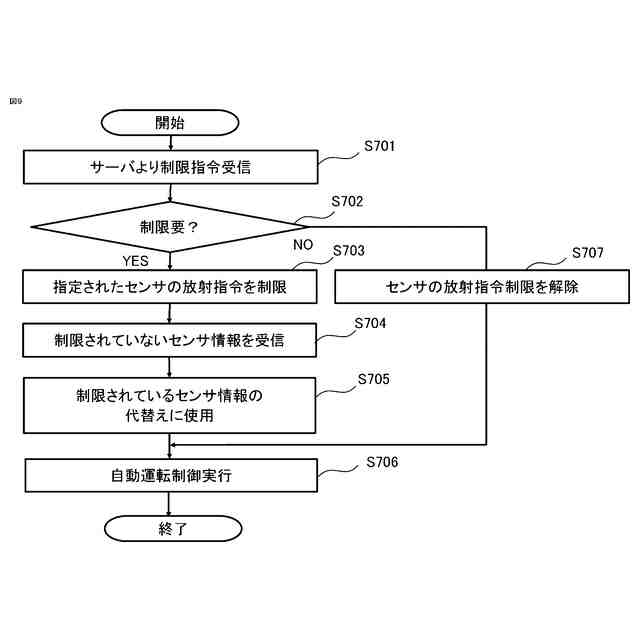
車外から前記センサ動作制限指令を受信して前記センサ制御器に伝達する受信器、および、
前記自車位置情報と、前記車載センサ情報を用いて自動運転を実施する自動運転制御装置が設けられた車載自動運転装置。
続きを表示(約 1,300 文字)
【請求項2】
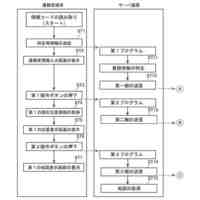
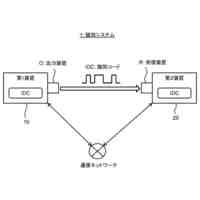
複数の請求項1に記載の車載自動運転装置と、
複数の前記車載自動運転装置の前記自車位置情報と前記車載センサ情報を受信するサーバ受信器、
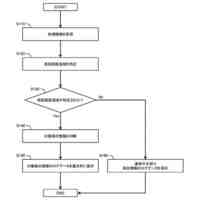
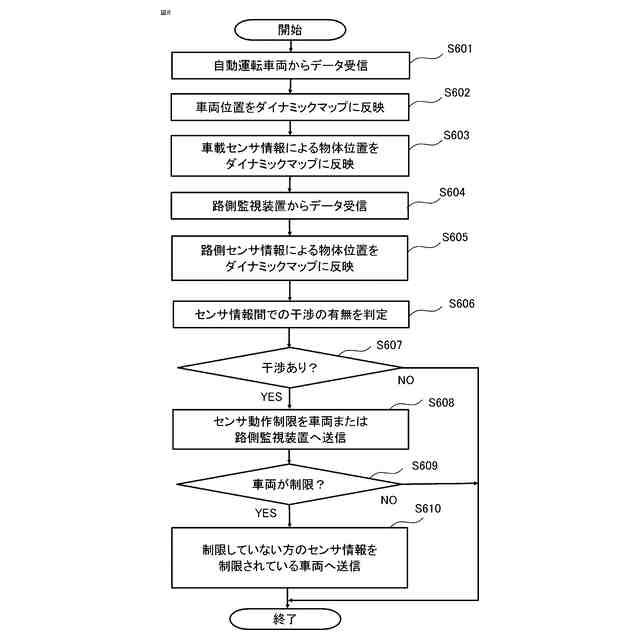
前記サーバ受信器から受け取った複数の前記車両の前記自車位置情報と前記車載センサ情報に基づいてダイナミックマップを更新し、前記車両間の前記車載センサが干渉すると判断した場合は、いずれか一方の前記車載自動運転装置の前記車載センサの前記放射指令を制限する判定をするダイナミックマップ演算部、および、
前記放射指令を制限する前記車載自動運転装置に前記センサ動作制限指令を送信するサーバ送信器が設けられたサーバと、を備えた自動運転車両システム。
【請求項3】
前記車載自動運転装置は、前記センサ制御器が出力する前記車載センサ情報の包含する前記車載センサの特性は、前記車載センサの前記センサ送信部の送信波および前記センサ受信部が検出する反射波の超音波、電波、光の種別、周波数帯、指向角度領域、および、出力または到達距離の情報を含む請求項2に記載の自動運転車両システム。
【請求項4】
前記サーバのダイナミックマップ演算部は、前記車載センサの位置と前記特性から前記車両間の前記車載センサの干渉の有無を判断する請求項3に記載の自動運転車両システム。
【請求項5】
前記車載自動運転装置は、車両ごとに複数の前記車載センサが設けられ、
前記サーバのダイナミックマップ演算部は、前記車両間の前記車載センサのうち干渉すると判断した前記車載センサについて、少なくとも一方の前記車載自動運転装置の前記車載センサの前記放射指令を制限する判定をする請求項2に記載の自動運転車両システム。
【請求項6】
前記サーバのダイナミックマップ演算部は、車両間の優先度を判定し、前記車両間の前記車載センサのうち干渉すると判断した前記車載センサについて、一方の車両の優先度以下の優先度を有する他方の車両の前記車載自動運転装置の前記車載センサの前記放射指令を制限する請求項2に記載の自動運転車両システム。
【請求項7】
前記サーバのダイナミックマップ演算部は、車両間の優先度を前記車両の走行状態に基づいて判定する請求項6に記載の自動運転車両システム。
【請求項8】
前記サーバのダイナミックマップ演算部は、車両間の優先度を前記車両の走行速度が高いほど優先度が高いと判定する請求項7に記載の自動運転車両システム。
【請求項9】
前記サーバのダイナミックマップ演算部は、車両間の優先度を判定し、前記車両間の前記車載センサのうち干渉すると判断した前記車載センサについて、一方の車両の優先度以下の優先度を有する他方の車両の前記車載自動運転装置の前記車載センサの前記放射指令を禁止する請求項5に記載の自動運転車両システム。
【請求項10】
前記サーバのダイナミックマップ演算部は、前記車両間の前記車載センサのうち干渉すると判断した前記車載センサについて、少なくとも一方の前記車両の前記車載自動運転装置の前記車載センサの前記センサ送信部の出力を低減する請求項5に記載の自動運転車両システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、車載自動運転装置および自動運転車両システムに関するものである。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
近年、自動車の自動運転技術の開発が盛んにおこなわれており、ユーザの運転支援のみにとどまらず、ユーザの運転操作の介在を必要としない完全自動運転に関する技術が脚光を帯びている。自動運転の導入によって、物流分野におけるドライバ不足の改善、交通渋滞の改善、ラストワンマイル問題への対応、といった様々な社会問題の解決が期待されている。
【0003】
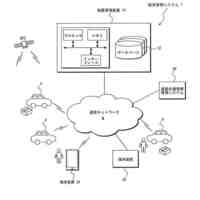
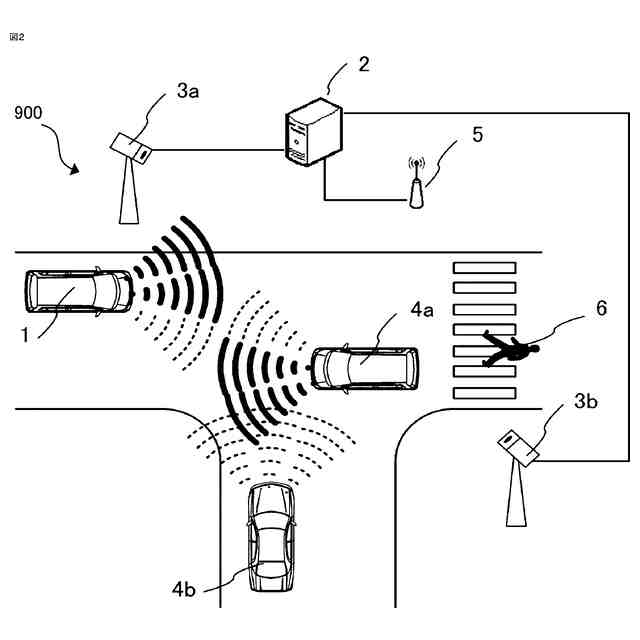
自動運転技術において、特に交差点、横断歩道、駐車場といった交通弱者と車両の分離が難しい場面での完全自動運転には困難が伴う。このため、交通管制サーバ(MECサーバとも称される)によりダイナミックマップを用いたエリア内の自動運転車両の管制を行う路車協調システムを構築することで課題解決を行う取り組みがされている。
【0004】
こういった路車協調システムを構築して、車両近傍の歩行者、障害物などの検知漏れを防ぐために自動運転車両に搭載する車載センサの数は増大している。そして、自動運転車両間において、搭載される車載センサ間の相互干渉が問題となっている。
【0005】
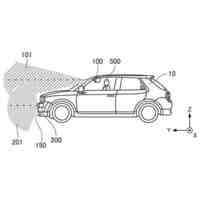
超音波、電波、レーザ光などによる物体検出において、車両の周囲にセンサ用の送信波を放射しその反射波を受信して車両の周囲の情報を得ることができる。異なる車両において同種の車載センサから送信波を放射した場合に、自車の車載センサの送信波の反射波に、他車両の車載センサの送信波が重畳されて受信されてしまう場合が考えられる。
【0006】
このような、異なる車両における車載センサ間の干渉を防止する方法として、各センサの送信波にランダムな符号化情報を加重し送信することが提案されている。そのようにして、異なる車両の車載センサから届く受信波を分離し干渉を防ぐことができる。(例えば特許文献1)
【先行技術文献】
【特許文献】
【0007】
特表2002-522773号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
特許文献1に開示されている技術では、各車載センサごとに固有のランダム情報、固有IDなどを送信波にデジタル符号化を行ったうえで重畳する必要がある。送信波にデジタル符号を重畳するために、高周波回路が必要であり、また受信波から自車の放射した送信波の反射波のみを分離するための回路が必要であり、車載センサの大型化、高コスト化を招くこととなる。さらに、重畳した高周波が減衰すると、自車の発した信号であるとの認識が困難となる。そのため、車載センサでの周囲の物体の検出が、近距離に限定され検出距離が低下するといった課題が存在する。
【0009】
本開示は、上記のような問題点を解決するためになされたものである。本開示は、車載センサの大型化、高コスト化を抑制しつつ、車載センサの検出距離の低下を招かずに、異なる自動運転車両の車載センサ間の相互干渉を防ぐことができる、車載自動運転装置、および自動運転車両システムを提供することを目的とするものである。
【課題を解決するための手段】
【0010】
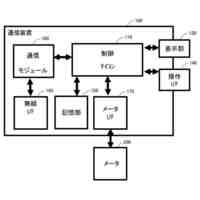
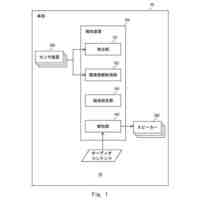
本開示に係る車載自動運転装置は、
車両に搭載され車両の位置を検出して自車位置情報を出力する自車位置検出器、
放射指令を生成し放射指令に基づいて車両の周囲にセンサ用の送信波を放射するセンサ送信部と、車両の周囲の物体による送信波の反射波を受信するセンサ受信部とを有し、センサ受信部によって受信された車両の周囲の情報をセンサ受信情報として出力する車載センサ、
車載センサによって出力されたセンサ受信情報に加えて車載センサの取り付け位置と車載センサの特性についての情報を包含する車載センサ情報を出力し、センサ動作制限指令に基づいて放射指令を制限するセンサ制御器、
自車位置検出器によって出力された自車位置情報と、センサ制御器によって出力された車載センサ情報を車外へ送信する送信器、
車外からセンサ動作制限指令を受信してセンサ制御器に伝達する受信器、および、
自車位置情報と、車載センサ情報を用いて自動運転を実施する自動運転制御装置が設けられたものである。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
迷子支援システム
6日前
株式会社サンライン
発炎筒携行容器
14日前
ニッタン株式会社
発信機
6日前
ニッタン株式会社
発信機
6日前
株式会社あおい興産
避難誘導灯
今日
京セラ株式会社
制御装置
6日前
戸田建設株式会社
検知システム
14日前
シャープ株式会社
通信装置および通信方法
14日前
株式会社JVCケンウッド
報知装置及び報知方法
6日前
株式会社JVCケンウッド
報知装置及び報知方法
6日前
株式会社JVCケンウッド
報知装置及び報知方法
6日前
株式会社デンソー
障害物通知システム
今日
株式会社デンソー
車両用表示装置
14日前
トヨタ自動車株式会社
情報処理装置
8日前
株式会社JVCケンウッド
運転支援装置及び運転支援方法
14日前
カシオ計算機株式会社
判定装置、判定方法及びプログラム
8日前
株式会社JVCケンウッド
運転支援装置及び運転支援方法
14日前
株式会社JVCケンウッド
運転支援装置及び運転支援方法
7日前
ホーチキ株式会社
火災検知器及びトンネル防災システム
3日前
個人
行動時間管理システム、行動時間管理方法及びプログラム
3日前
日産自動車株式会社
配車管理装置及び配車管理方法
6日前
日本無線株式会社
航海データ記憶装置および航海データ記憶方法
14日前
京セラ株式会社
情報処理装置及び情報処理方法
14日前
キヤノン株式会社
表示装置、制御方法及びプログラム
14日前
日立Astemo株式会社
検査監視装置
6日前
トヨタ自動車株式会社
車両制御装置
3日前
株式会社日立製作所
自律制御システムおよび自律制御方法
6日前
トヨタ自動車株式会社
識別システム
6日前
トヨタ自動車株式会社
情報処理方法
3日前
株式会社ユピテル
システム等
9日前
日本信号株式会社
バス接近案内システム及びバスロケーションシステム
14日前
トヨタ自動車株式会社
自動運転システム
今日
トヨタ自動車株式会社
自動運転システム
今日
能美防災株式会社
表示灯
3日前
能美防災株式会社
表示灯
3日前
トヨタ自動車株式会社
自動運転システム
今日
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ