TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025010520
公報種別
公開特許公報(A)
公開日
2025-01-21
出願番号
2024108703
出願日
2024-07-05
発明の名称
シーンの1つまたは複数のオクルージョンされたエリアを検出するための方法および非一時的コンピュータ可読記憶媒体
出願人
アクシス アーベー
代理人
園田・小林弁理士法人
主分類
G06T
7/60 20170101AFI20250110BHJP(計算;計数)
要約
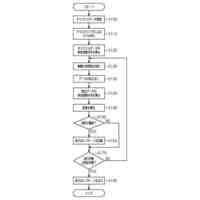
【課題】物体トラッキングシステムによって分析されるシーンの1つまたは複数のオクルージョンされたエリアを検出する方法を提供する。
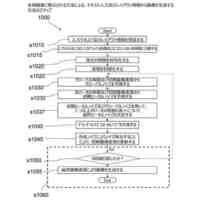
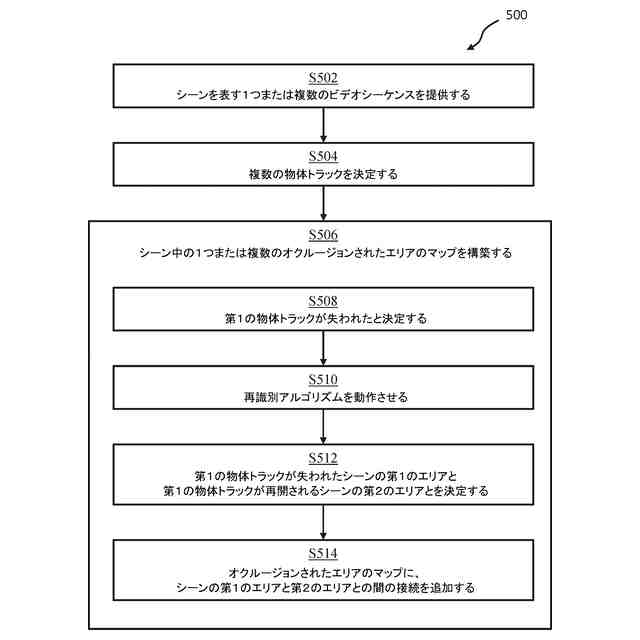
【解決手段】方法は、シーン中の1つまたは複数のオクルージョンされたエリアのマップを構築すること(S506)を含む。マップを構築することは、失われた物体トラックを再開することを試みるために、ビデオシーケンス上で再識別アルゴリズムを動作させること(S510)を含む。物体トラックが成功裡に再開された場合、第1の物体トラックが失われたシーンのエリアと、第1の物体トラックが再開されたシーンのエリアとを決定する(S512)。マップが、シーンの第1のエリア中で失われた物体トラックがシーンの第2のエリア中で再開されたことを識別するように、マップにシーンの第1のエリアと第2のエリアとの間の接続を追加する(S514)。
【選択図】図5
特許請求の範囲
【請求項1】
物体トラッキングシステムによって分析される1つまたは複数のビデオシーケンス中の1つまたは複数のオクルージョンされたエリアを検出するためのコンピュータ実装方法であって、前記方法は、
1つまたは複数のビデオシーケンスを提供することであって、前記1つまたは複数のビデオシーケンスが同じシーンを表しており、前記1つまたは複数のビデオシーケンスが複数の物体を含む、1つまたは複数のビデオシーケンスを提供することと、
前記1つまたは複数のビデオシーケンス中の複数の物体トラックを決定することと
を含み、
前記方法は、前記1つまたは複数のビデオシーケンス中の1つまたは複数のオクルージョンされたエリアのマップを構築することであって、前記マップを構築することが、
a) 前記複数の物体トラックのうちの、前記複数の物体のうちの第1の物体に対応する第1の物体トラックが失われたと決定すると、前記第1の物体トラックを再開することを試みるために、前記1つまたは複数のビデオシーケンスのうちの少なくとも1つのビデオシーケンス上で再識別アルゴリズムを動作させることと、
b) 前記第1の物体トラックを成功裡に再開すると、
前記第1の物体トラックが失われた第1のエリアであって、前記第1のエリアが、前記1つまたは複数のビデオシーケンス中の複数のエリアのうちの前記1つまたは複数のビデオシーケンス中で決定される、第1のエリアと、前記第1の物体トラックが再開される第2のエリアであって、前記第2のエリアが、前記1つまたは複数のビデオシーケンス中の前記複数のエリアのうちの前記1つまたは複数のビデオシーケンス中で決定される、第2のエリアとを決定することであって、前記1つまたは複数のビデオシーケンス中の前記複数のエリアの各エリアが、前記1つまたは複数のビデオシーケンスによってキャプチャされた前記シーンの3Dエリアの2D表現のエリアを指し、前記1つまたは複数のビデオシーケンスが、各ビデオシーケンスの画像フレーム中に表された物体およびエリアが変換されるベース座標系に関連付けられる、第1のエリアと第2のエリアとを決定することと、
1つまたは複数のオクルージョンされたエリアの前記マップが、前記第1のエリア中で失われた物体トラックが前記第2のエリア中で再開されたことを識別するように、前記マップに、前記第1のエリアと前記第2のエリアとの間の接続を追加することと
を含む、マップを構築することを含むことを特徴とする、方法。
続きを表示(約 1,800 文字)
【請求項2】
前記マップを構築することが、前記複数の物体トラックのうちの複数の失われた物体トラックに対してステップa)およびb)を実施することを含む、請求項1に記載の方法。
【請求項3】
1つまたは複数のオクルージョンされたエリアの前記マップは、前記第1のエリア中で失われた物体トラックが前記第2のエリア中で再開される確率をさらに示す、請求項2に記載の方法。
【請求項4】
前記マップは、前記第1のエリア中で失われた物体トラックが前記1つまたは複数のビデオシーケンス中のエリアのサブセット中で再開されたことを示し、前記サブセットが、前記1つまたは複数のビデオシーケンス中の前記複数のエリアのうちの前記1つまたは複数のビデオシーケンス中の少なくとも2つのエリアを含み、前記マップは、前記サブセット中の各エリアについて、前記第1のエリア中で失われた物体トラックが前記サブセット中のそのエリア中で再開される確率をさらに示す、請求項3に記載の方法。
【請求項5】
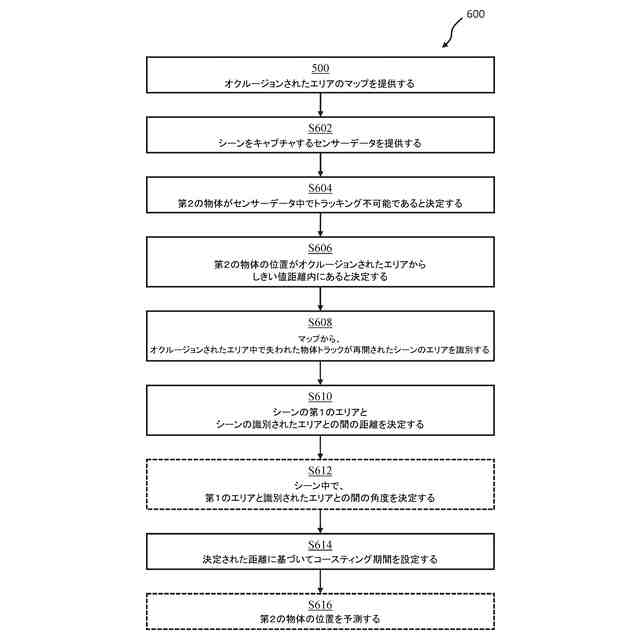
前記シーンをキャプチャするセンサーデータを提供するステップと、
第2の物体トラックを決定するために、前記センサーデータ中で第2の物体をトラッキングするステップと、
前記第2の物体が前記センサーデータ中でトラッキング不可能であると決定すると、前記第2の物体トラックにおける前記第2の物体の最新の観測の前記センサーデータにおける位置を決定するステップと、前記第2の物体トラックにおける前記第2の物体の前記最新の観測の前記位置が前記第1のエリアからしきい値距離内にあると決定すると、
前記マップから、前記第1のエリア中で失われた物体トラックが再開された前記1つまたは複数のビデオシーケンス中のエリアを識別するステップ、および前記第1のエリアと識別された前記エリアとの間の距離を決定するステップと、
決定された前記距離に基づいて前記第2の物体トラックのためのコースティング期間を設定するステップであって、より大きい距離が、同等により長いコースティング期間をもたらす、前記第2の物体トラックのためのコースティング期間を設定するステップと
をさらに含む、請求項1に記載の方法。
【請求項6】
請求項4に従属するとき、前記マップから、前記第1のエリア中で失われた物体トラックが再開された前記1つまたは複数のビデオシーケンス中のエリアを識別する前記ステップが、
前記マップによって示される最も大きい確率を有する、前記サブセットからの前記1つまたは複数のビデオシーケンス中の前記エリアを選択すること
を含む、請求項5に記載の方法。
【請求項7】
前記コースティング期間を設定することは、
前記第2の物体トラックにおける前記第2の物体の前記最新の観測において前記第2の物体の速さを決定することと、
前記第2の物体の前記速さにさらに基づいて第2のトラックのための前記コースティング期間を設定することであって、より高い速さが、同等により短いコースティング期間をもたらす、前記第2のトラックのための前記コースティング期間を設定することと
を含む、請求項5に記載の方法。
【請求項8】
前記第2の物体が前記センサーデータ中でトラッキング不可能であると決定すると、
決定された前記速さに基づいて、前記センサーデータ中でトラッキング不可能である間に、前記第2の物体の位置を予測すること
請求項7に記載の方法。
【請求項9】
前記第2の物体が前記センサーデータ中でトラッキング不可能であると決定すると、
前記1つまたは複数のビデオシーケンス中の前記第1のエリアと前記識別されたエリアとの間の角度を決定することと、
前記角度にさらに基づいて、前記センサーデータ中でトラッキング不可能である間に、前記第2の物体の前記位置を予測することと
をさらに含む、請求項8に記載の方法。
【請求項10】
センサーデータが、レーダーデータ、ライダーデータ、またはビデオデータのうちの1つである、請求項4に記載の方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、物体トラッキング(tracking)に関し、詳細には、物体トラッキングシステムによって分析されるシーンの1つまたは複数のオクルージョン(occlude)されたエリアを検出するためのコンピュータ実装方法に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
物体トラッキングは、コンピュータビジョン内の、重要な、および広く研究されている分野である。物体トラッキングの目的は、シーンをキャプチャするセンサーデータ中の物体(または複数の物体)のトラックをたどる(keep track of)ことである。
【0003】
オクルージョン(occlusion)は、たとえば、トラッキング(track)される物体がシーン中の静的物体によって隠されるとき、物体トラッキングにおける重大な課題を提示する。たとえば、トラッキングアルゴリズムは、木または建築物の後ろで瞬間的に不明瞭にされた歩行者を失い得る。
【0004】
物体トラック(track)が失われたとき、再び物体トラックを再開することを試みるために、コースティング(coasting)と呼ばれるプロセスが使用され得る。コースティングは、オクルージョンまたは信号喪失中になど、物体が一時的に検出されないとき、物体の前の移動に基づいて物体の位置を予測することを実践することを指す。コースティングは、物体の軌道を推定するために、線形外挿またはより複雑な動きモデルのような技法を利用する。コースティングは、喪失の期間中に物体の軌道を推定し続け、仮想トラックを維持する。新しい物体が仮想トラックの近くで検出されたとき、その物体は、失われたトラックの物体と同じであると見なされ得、そのトラックは、成功裡に再捕捉されたと見なされ得、トラッキングが再開する。しかしながら、コースティングは、特に、物体が、検出されない間にその速さまたは方向を変更する場合、時間とともに誤差を生じるリスクをもつ。この理由で、物体トラックのコースティングは、一般に、(コースティング期間と呼ばれる)ある時間期間の間のみ実施される。物体トラックがコースティング期間の終了の前に成功裡に再捕捉されなかった場合、コースティングは、失敗したと見なされ、物体トラックは、失われたと見なされ、削除される。
【0005】
コースティングプロセスが失敗した場合、または、概して、物体トラックが失われたとき、失われたトラックを再開することを試みるために、再識別プロセスが使用され得る。再識別は、ビデオシーケンス中の物体を、そのビデオシーケンスの前の1つまたは複数のフレーム中でまたは別のビデオシーケンスのフレーム中で(たとえば、オクルージョンされる前に)前に検出された同じ物体として、識別するプロセスを指す。物体を再識別したとき、失われたトラックは続けられ得る。再識別は、検出された物体から有意味な特徴を抽出することによって機能する。(たとえば、物体がオクルージョンされたかまたは視野から離れた後に)物体が再識別される必要があるとき、シーン中のトラッキングされていない物体から特徴が抽出される。その場合新しい検出の特徴ベクトルを、失われたトラックにおいて物体のために前に抽出された特徴ベクトルと比較するために、(ユークリッド距離またはコサイン類似度のような)類似度測度が使用される。整合が検出された場合、失われたトラックが続けられ得る。
【0006】
再識別は、一般に、かなりの計算リソースを必要とする。その上、再識別は、レーダーデバイスによってキャプチャされるデータ中で物体をトラッキングするシステムなど、すべての物体トラッキングシステムにおいて可能であるとは限らない。
【0007】
監視されるシーンのオクルージョンされたエリアのマップを維持することが、コースティングプロセスおよび/または再識別プロセスを改善し得る。しかしながら、シーン中のオクルージョンされたエリアを正しく識別し、オクルージョンされている間に、これらを使用して物体挙動を予測することは、複雑であり得る。
【0008】
したがって、このコンテキストにおける改善の必要がある。
【0009】
マルチカメラサーベイランスシステムのための階層型データベース(JAMES BLACKら、PATTERN ANALYSIS AND APPLICATIONS、SPRINGER-VERLAG、LO、vol.7、no.4、2004年12月1日、XP019381474)が、視覚サーベイランスアプリケーションのためのイベント検出およびビデオコンテンツ分析のためのフレームワークを提示する。
【0010】
オクルージョンハンドリングを伴うリアルタイムトラフィック監視(FERNANDEZ-SANJURJO MAUROら、TOPICS IN CRYPTOLOGY - CT-RSA 2020、2019年9月22日、XP047523419)が、オクルージョンに対してロバストでありながらリアルタイムで稼働することの要件を満たし得るやり方で検出とトラッキングとを組み合わせるトラフィック監視システムを提案する。
【先行技術文献】
【非特許文献】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
キヤノン電子株式会社
通信システム
7日前
株式会社ザメディア
出席管理システム
1日前
トヨタ自動車株式会社
工程計画装置
1日前
トヨタ自動車株式会社
作業評価装置
7日前
株式会社タクテック
商品取出集品システム
今日
ミサワホーム株式会社
情報処理装置
今日
トヨタ自動車株式会社
作業判定方法
2日前
株式会社NURSY
再就職の支援装置
8日前
TDK株式会社
等価回路
9日前
株式会社村田製作所
動き検知装置
今日
ゼネラル株式会社
RFIDタグ付き物品
3日前
トヨタ自動車株式会社
情報処理システム
2日前
個人
公益寄付インタラクティブシステム
7日前
トヨタ自動車株式会社
情報処理方法
2日前
大王製紙株式会社
作業管理システム
8日前
富士フイルム株式会社
タッチセンサ
7日前
個人
コンテンツ配信システム
今日
株式会社国際電気
支援システム
3日前
株式会社インテック
触覚ディスプレイ装置
8日前
個人
プラットフォームシステム
今日
富士通株式会社
画像生成方法
6日前
株式会社デンソー
情報処理方法
7日前
ブラザー工業株式会社
ラベルプリンタ
2日前
トヨタ自動車株式会社
作業支援システム
今日
株式会社知財事業研究所
運行計画作成システム
今日
甍エンジニアリング株式会社
屋根材買い取りシステム
6日前
ミサワホーム株式会社
管理装置及び賃貸システム
8日前
日立建機株式会社
作業機械の管理装置
3日前
日立建機株式会社
潤滑油診断システム
1日前
株式会社マーケットヴィジョン
情報処理システム
7日前
株式会社日立製作所
設計支援装置
1日前
トヨタ自動車株式会社
車両用の情報処理装置
2日前
株式会社日立製作所
タスク管理システム
今日
株式会社アイシン
情報提供システム
6日前
トヨタ自動車株式会社
車両用の情報処理装置
1日前
アルプスアルパイン株式会社
入力装置
6日前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ