TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025010292
公報種別
公開特許公報(A)
公開日
2025-01-20
出願番号
2024190056,2021115784
出願日
2024-10-29,2021-07-13
発明の名称
異常動作範囲設定システム、および、異常動作検出システム
出願人
コベルコ建機株式会社
代理人
弁理士法人ATEN
主分類
E02F
9/20 20060101AFI20250109BHJP(水工;基礎;土砂の移送)
要約
【課題】自動運転される作業機械の動作が異常であることを検出するための異常動作範囲を設定する。
【解決手段】異常動作範囲設定システムは、作業機械10と、目標位置取得部41と、異常動作範囲設定部45と、を備える。作業機械10は、監視対象部19を含み、自動運転される。目標位置取得部41は、監視対象部19の目標位置に関する情報である目標位置情報を取得する。異常動作範囲設定部45は、目標位置取得部41に取得された目標位置情報に基づいて、作業機械10の動作が異常動作であるか否かを判定するための範囲である異常動作範囲Bを設定する。
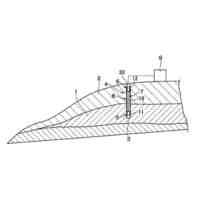
【選択図】図4
特許請求の範囲
【請求項1】
監視対象部を含み、自動運転される作業機械と、
前記監視対象部の目標位置に関する情報である目標位置情報を取得する目標位置取得部と、
前記目標位置取得部に取得された前記目標位置情報に基づいて、前記作業機械の動作が異常動作であるか否かを判定するための範囲である異常動作範囲を設定する異常動作範囲設定部と、
を備える、
異常動作範囲設定システム。
続きを表示(約 810 文字)
【請求項2】
請求項1に記載の異常動作検出システムであって、
前記作業機械は、作業を行うアタッチメントを備え、
前記監視対象部は、前記アタッチメントの先端部である、
異常動作範囲設定システム。
【請求項3】
請求項1または2に記載の異常動作検出システムであって、
前記異常動作範囲設定部は、前記作業機械の自動運転の作業の内容の変化に伴って前記異常動作範囲を変化させる、
異常動作範囲設定システム。
【請求項4】
請求項1~3のいずれか1項に記載の異常動作検出システムであって、
前記目標位置取得部は、前記監視対象部の時系列の前記目標位置情報を取得し、
前記異常動作範囲設定部は、所定時間ごとに前記異常動作範囲を変化させる、
異常動作範囲設定システム。
【請求項5】
請求項1~4のいずれか1項に記載の異常動作検出システムであって、
前記異常動作範囲設定部は、前記作業機械の周囲に設定される侵入禁止範囲を前記異常動作範囲に含ませる、
異常動作範囲設定システム。
【請求項6】
請求項1~5のいずれか1項に記載の異常動作範囲設定システムと、
前記監視対象部の現在の位置の情報を取得する現在位置取得部と、
前記現在位置取得部に取得された前記監視対象部の現在の位置と、前記異常動作範囲と、に基づいて、前記作業機械の動作が異常動作であるか否かを判定する異常動作判定部と、
を備える、
異常動作検出システム。
【請求項7】
請求項6に記載の異常動作検出システムであって、
前記現在位置取得部は、前記作業機械の外部から撮像された画像に基づいて前記監視対象部の現在の位置の情報を取得する、
異常動作検出システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業機械の異常動作を監視するための、異常動作範囲設定システム、および、異常動作検出システムに関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
例えば特許文献1などに、自動運転される作業機械が撮像され、撮像されたデータに基づいて、適切な位置で作業機械に放土させることを図った技術が記載されている。
【先行技術文献】
【特許文献】
【0003】
特開平11-293708号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
同文献に記載の技術では、自動運転される作業機械の動作が異常であることを検出することはできない。
【0005】
そこで、本発明は、自動運転される作業機械の動作が異常であることを検出することができる異常動作検出システムを提供することを目的とする。
【課題を解決するための手段】
【0006】
異常動作検出システムは、作業機械と、目標位置取得部と、異常動作範囲設定部と、現在位置取得部と、異常動作判定部と、を備える。前記作業機械は、監視対象部を含み、自動運転される。前記目標位置取得部は、前記監視対象部の目標位置に関する情報である目標位置情報を取得する。前記異常動作範囲設定部は、前記目標位置取得部に取得された前記目標位置情報に基づいて、前記監視対象部が前記目標位置に配置されたと仮定したときの前記監視対象部の位置よりも外側の所定の範囲である異常動作範囲を設定する。現在位置取得部は、前記監視対象部の現在の位置の情報を取得する。異常動作判定部は、前記現在位置取得部に取得された前記監視対象部の現在の位置が、前記異常動作範囲の内側であるか否かを判定する。
【発明の効果】
【0007】
上記構成により、自動運転される作業機械の動作が異常であることを検出することができる。
【図面の簡単な説明】
【0008】
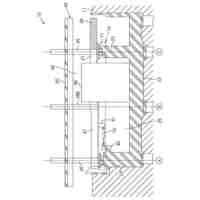
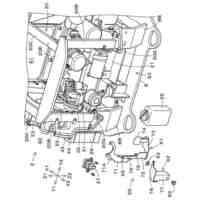
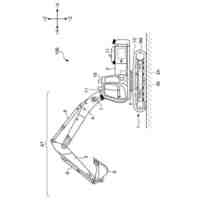
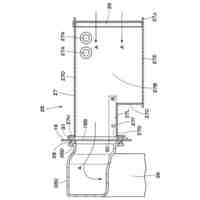
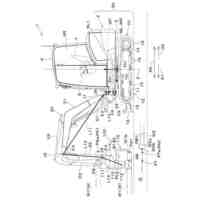
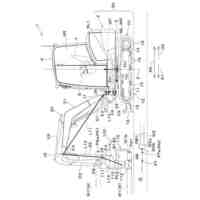
異常動作検出システム1の作業機械10などを横から見た図である。
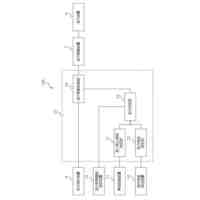
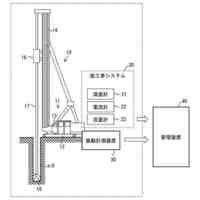
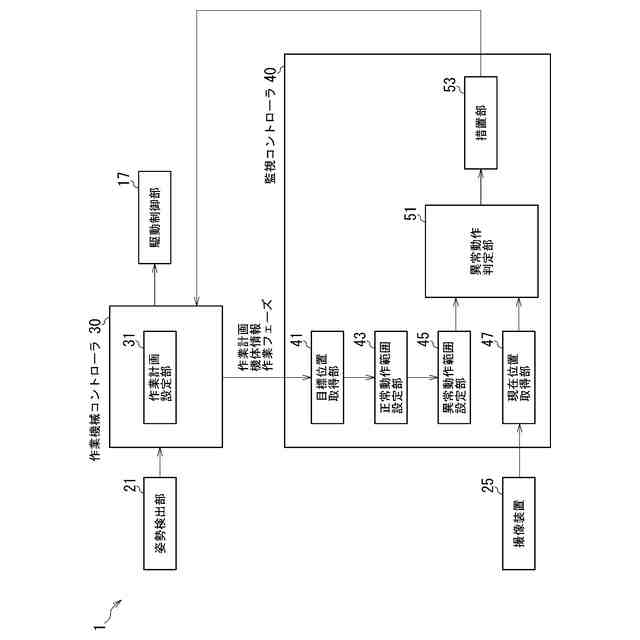
図1に示す異常動作検出システム1を示すブロック図である。
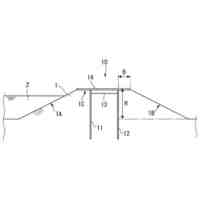
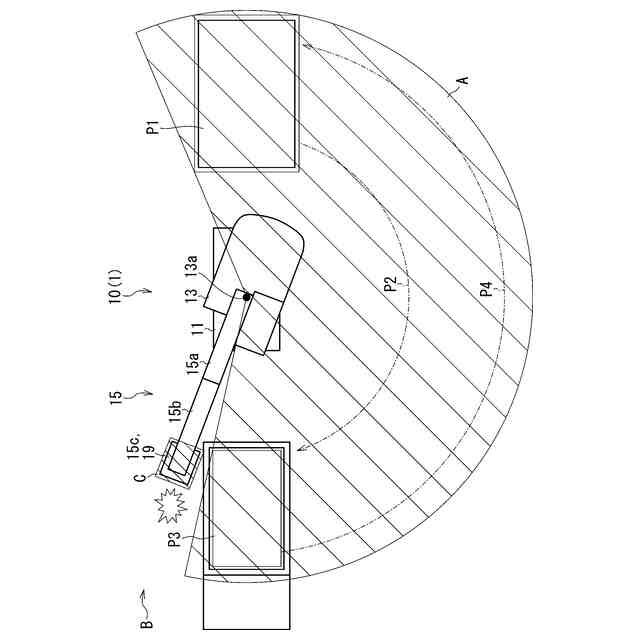
図1に示す作業機械10などを上から見た図であり、作業計画の例を示す図である。
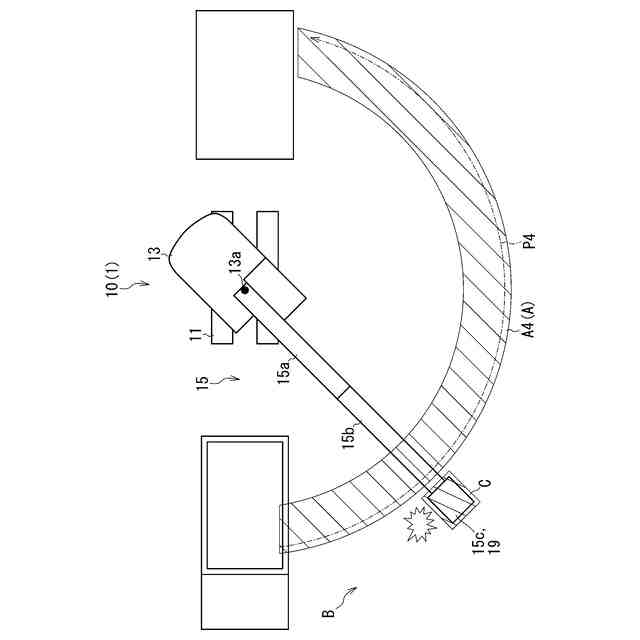
図3相当図であり、上部旋回体13の旋回範囲などに基づいて設定された正常動作範囲Aなどを示す図である。
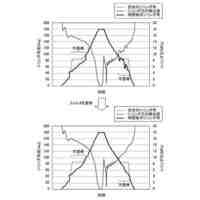
図3相当図であり、複数の作業フェーズの情報に基づいて設定された正常動作範囲Aなどを示す図である。
図3相当図であり、1つの作業フェーズの情報に基づいて設定された正常動作範囲Aなどを示す図である。
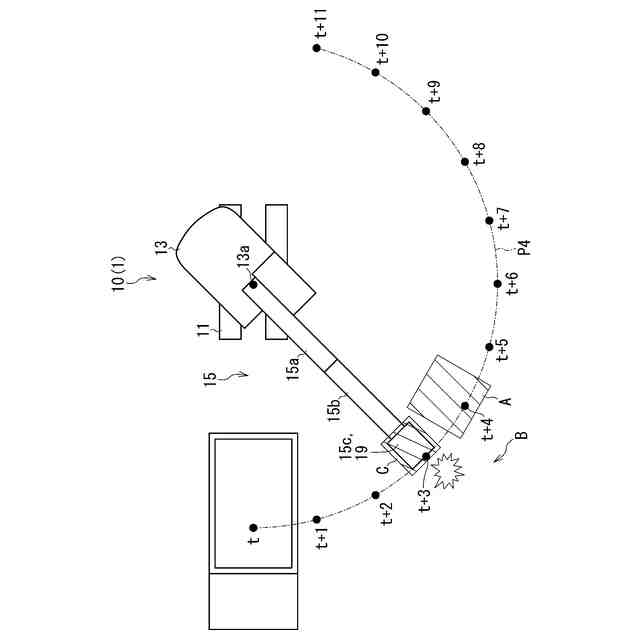
図3相当図であり、特定の時刻での正常動作範囲Aなどを示す図である。
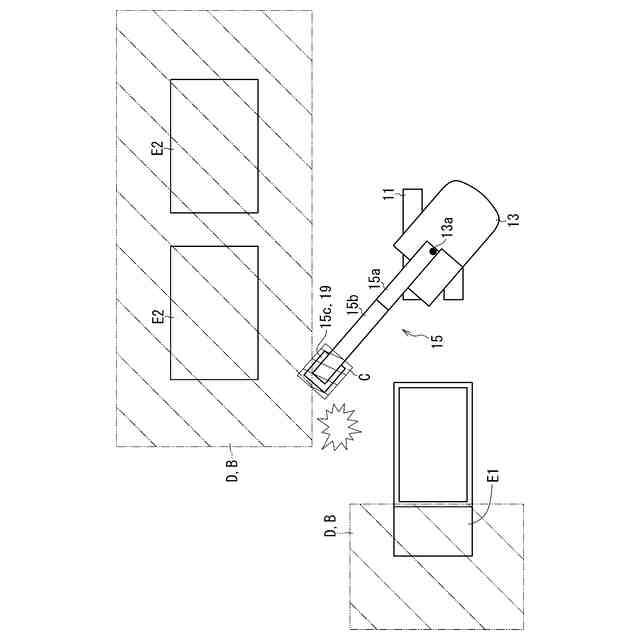
図3に示す作業機械10の周囲の侵入禁止範囲Dなどを上から見た図である。
【発明を実施するための形態】
【0009】
図1~図8を参照して、異常動作検出システム1について説明する。
【0010】
異常動作検出システム1は、図1に示す作業機械10の異常動作を検出するシステムである。異常動作検出システム1は、例えば、作業機械10の作業現場(建設現場など)に設けられる。異常動作検出システム1は、作業機械10と、姿勢検出部21(図2参照)と、撮像装置25と、作業機械コントローラ30(図2参照)と、監視コントローラ40(図2参照)と、を備える。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社大林組
建築物
5日前
日本車輌製造株式会社
杭打機
2日前
株式会社ジェック
水流方向切替装置
7日前
日立建機株式会社
作業機械
今日
株式会社クボタ
作業機
5日前
株式会社クボタ
作業機
5日前
株式会社クボタ
作業機
5日前
コベルコ建機株式会社
作業機械
2日前
株式会社クボタ
作業機
5日前
ヤンマーホールディングス株式会社
作業機械
5日前
株式会社テクアノーツ
通船ゲート装置
2日前
住友重機械工業株式会社
ショベル
5日前
住友重機械工業株式会社
作業機械
14日前
住友重機械工業株式会社
ショベル
5日前
鹿島建設株式会社
建込み方法
27日前
株式会社地盤リスク研究所
擁壁の補強工法
2日前
大和ハウス工業株式会社
建物の建設方法
5日前
コベルコ建機株式会社
作業システム
2日前
日鉄建材株式会社
透過型砂防堰堤の設計方法
7日前
大和ハウス工業株式会社
浸水推定装置
2日前
日本製鉄株式会社
堤防
5日前
清水建設株式会社
礫材の液状化対策構造
2日前
一般財団法人電力中央研究所
地盤の状況計測装置
5日前
株式会社日立建機ティエラ
建設機械
7日前
株式会社地盤リスク研究所
盛土安定化工法、及び盛土構造
2日前
株式会社大林組
判定支援システム及び判定支援方法
5日前
コベルコ建機株式会社
建設機械
1日前
住友建機株式会社
ショベル、及びショベルの表示装置
5日前
大和ハウス工業株式会社
布基礎、及び布基礎の構築方法
5日前
株式会社クボタ
作業機および作業機の制御方法
13日前
株式会社クボタ
作業機および作業機の制御方法
13日前
株式会社クボタ
作業機および作業機の制御方法
13日前
株式会社クボタ
作業機および作業機の制御方法
13日前
株式会社クボタ
作業機および作業機の制御方法
13日前
大和ハウス工業株式会社
樹脂発泡ブロックと振動低減構造
5日前
株式会社イノアック住環境
複合構造体及び落石の予防方法
5日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ