TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025009574
公報種別
公開特許公報(A)
公開日
2025-01-20
出願番号
2023112670
出願日
2023-07-07
発明の名称
分散シミュレーション装置及び分散シミュレーション方法
出願人
川崎重工業株式会社
代理人
個人
主分類
G06F
9/52 20060101AFI20250110BHJP(計算;計数)
要約
【課題】分散シミュレーションにおいて、高速計算及びコンピュータ資源の有効活用を実現する。
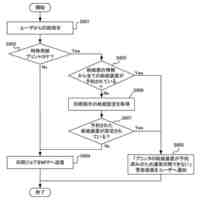
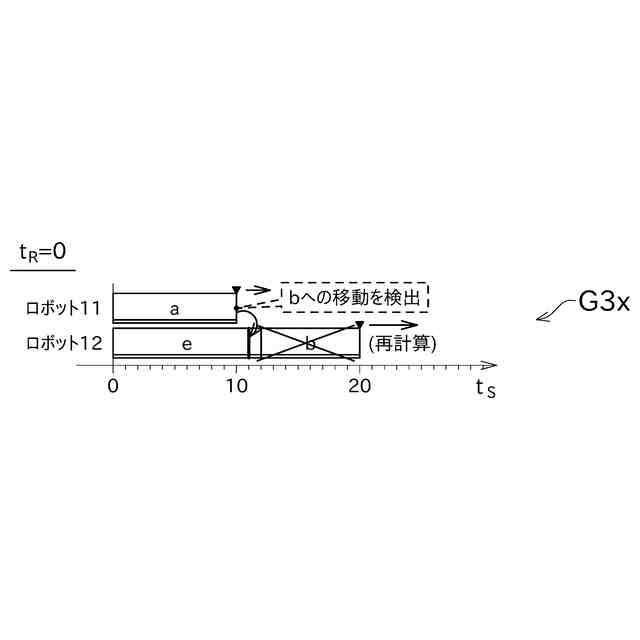
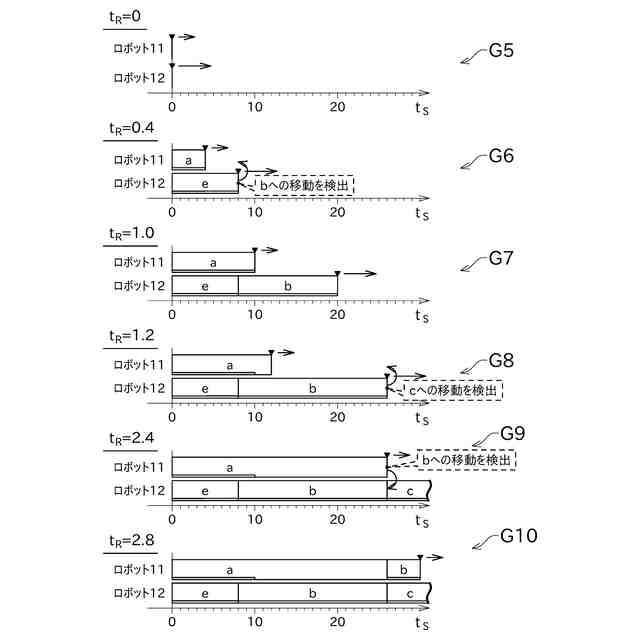
【解決手段】第1シミュレータ及び第2シミュレータは、現実の時刻の進行速度より速い速度でシミュレーション時刻を独立に進行させながらシミュレーション計算を行う。第1シミュレータのシミュレーション計算結果に起因する、第2シミュレータのシミュレーション計算の条件の変化が検出される。第2シミュレータのシミュレーション時刻が、第2シミュレータのシミュレーション計算の条件が変化するシミュレーション時刻を示す条件変化シミュレーション時刻よりも先行している場合に、前記第2シミュレータは、シミュレーション時刻を条件変化シミュレーション時刻又はそれより前のシミュレーション時刻まで戻して、シミュレーション計算を再び行う。
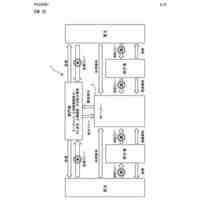
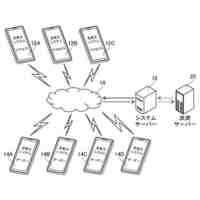
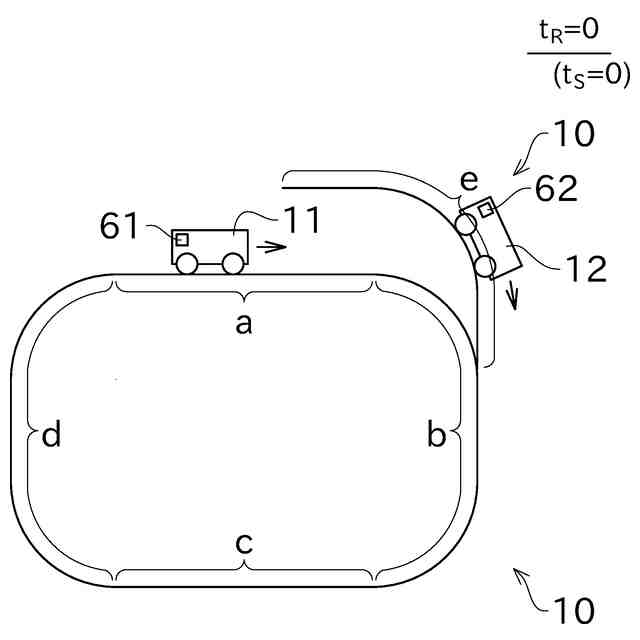
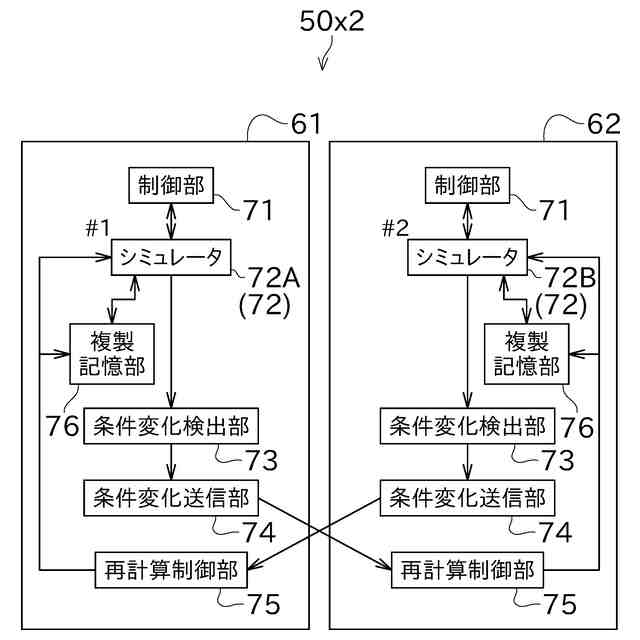
【選択図】図2
特許請求の範囲
【請求項1】
現実の時刻の進行速度より速い速度でシミュレーション時刻を進行させながら、第1ロボットのシミュレーション計算を行う第1シミュレータと、
前記第1シミュレータのシミュレーション時刻とは独立に、現実の時刻の進行速度より速い速度でシミュレーション時刻を進行させながら、第2ロボットのシミュレーション計算を行う第2シミュレータと、
前記第1シミュレータのシミュレーション計算結果に起因する、前記第2シミュレータの前記シミュレーション計算の条件の変化を検出する条件変化検出部と、
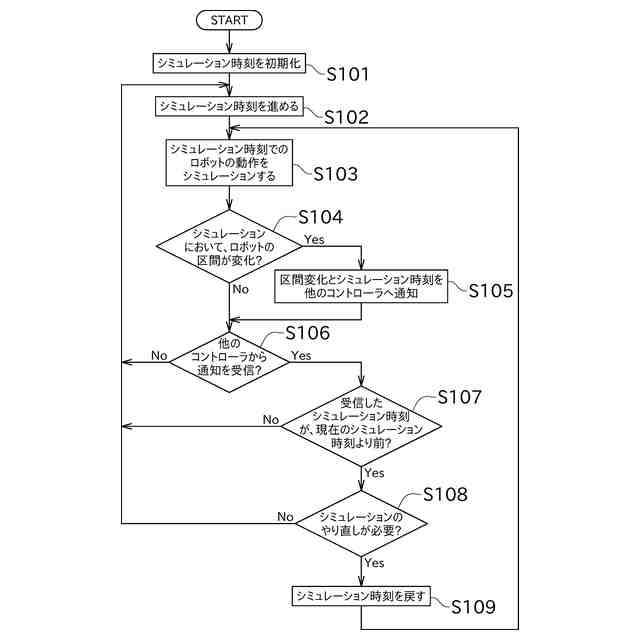
前記第2シミュレータのシミュレーション時刻が、前記第2シミュレータのシミュレーション計算の条件が変化するシミュレーション時刻を示す条件変化シミュレーション時刻よりも先行している場合に、前記第2シミュレータのシミュレーション時刻を前記条件変化シミュレーション時刻又はそれより前のシミュレーション時刻まで戻し、戻されたシミュレーション時刻から前記第2シミュレータにシミュレーション計算を再び行わせる再計算制御部と、
を備える、分散シミュレーション装置。
続きを表示(約 2,200 文字)
【請求項2】
請求項1に記載の分散シミュレーション装置であって、
前記再計算制御部は、前記第2シミュレータのシミュレーション時刻が、前記条件変化シミュレーション時刻よりも先行しており、かつ、条件の変化により前記第2シミュレータのシミュレーション計算をやり直す必要が生じた場合に、前記第2シミュレータのシミュレーション時刻を前記条件変化シミュレーション時刻又はそれより前のシミュレーション時刻まで戻し、戻されたシミュレーション時刻から前記第2シミュレータにシミュレーション計算を再び行わせる、分散シミュレーション装置。
【請求項3】
請求項1又は2に記載の分散シミュレーション装置であって、
前記再計算制御部は、前記第2シミュレータと物理的に同一のコンピュータに設けられている、分散シミュレーション装置。
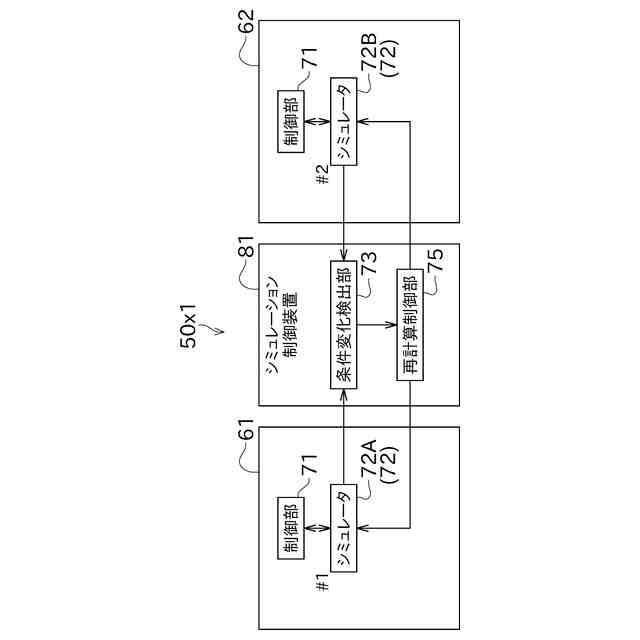
【請求項4】
請求項1又は2に記載の分散シミュレーション装置であって、
前記再計算制御部は、前記第1シミュレータとも前記第2シミュレータとも物理的に異なるコンピュータに設けられている、分散シミュレーション装置。
【請求項5】
現実の時刻の進行速度より速い速度でシミュレーション時刻を進行させながら、第1ロボットのシミュレーション計算を行う第1シミュレータと、
前記第1シミュレータのシミュレーション時刻とは独立に、現実の時刻の進行速度より速い速度でシミュレーション時刻を進行させながら、第2ロボットのシミュレーション計算を行う第2シミュレータと、
適宜のタイミングで前記第2シミュレータの複製を記憶可能な複製記憶部と、
前記第1シミュレータのシミュレーション計算結果に起因する、前記第2シミュレータの前記シミュレーション計算の条件の変化を検出する条件変化検出部と、
前記第2シミュレータのシミュレーション時刻が、前記第2シミュレータのシミュレーション計算の条件が変化するシミュレーション時刻を示す条件変化シミュレーション時刻よりも先行している場合に、前記条件変化シミュレーション時刻以前のシミュレーション時刻の状態を保持している前記複製にシミュレーション計算を再び行わせる再計算制御部と、
を備える、分散シミュレーション装置。
【請求項6】
現実の時刻の進行速度より速い速度でシミュレーション時刻を進行させながら、第1ロボットのシミュレーション計算を行う第1シミュレータと、
前記第1シミュレータのシミュレーション時刻とは独立に、現実の時刻の進行速度より速い速度でシミュレーション時刻を進行させながら、第2ロボットのシミュレーション計算を行う第2シミュレータと、
により分散的にシミュレーション計算を行う分散シミュレーション方法であって、
前記第1シミュレータのシミュレーション計算結果に起因する、前記第2シミュレータのシミュレーション計算の条件の変化を検出し、
前記第2シミュレータのシミュレーション時刻が、前記第2シミュレータのシミュレーション計算の条件が変化するシミュレーション時刻を示す条件変化シミュレーション時刻よりも先行している場合に、前記第2シミュレータのシミュレーション時刻を前記条件変化シミュレーション時刻又はそれより前のシミュレーション時刻まで戻してシミュレーション計算を再び行うように前記第2シミュレータを制御する、分散シミュレーション方法。
【請求項7】
請求項6に記載の分散シミュレーション方法であって、
前記第2シミュレータのシミュレーション時刻が、前記条件変化シミュレーション時刻よりも先行しており、かつ、条件の変化により前記第2シミュレータのシミュレーション計算をやり直す必要が生じた場合に、前記第2シミュレータのシミュレーション時刻を前記条件変化シミュレーション時刻又はそれより前のシミュレーション時刻まで戻してシミュレーション計算を再び行うように前記第2シミュレータを制御する、分散シミュレーション方法。
【請求項8】
現実の時刻の進行速度より速い速度でシミュレーション時刻を進行させながら、第1ロボットのシミュレーション計算を行う第1シミュレータと、
前記第1シミュレータのシミュレーション時刻とは独立に、現実の時刻の進行速度より速い速度でシミュレーション時刻を進行させながら、第2ロボットのシミュレーション計算を行う第2シミュレータと、
により分散的にシミュレーション計算を行う分散シミュレーション方法であって、
前記第2シミュレータの複製を適宜のタイミングで記憶し、
前記第1シミュレータのシミュレーション計算結果に起因する、前記第2シミュレータの前記シミュレーション計算の条件の変化を検出し、
前記第2シミュレータのシミュレーション時刻が、前記第2シミュレータのシミュレーション計算の条件が変化するシミュレーション時刻を示す条件変化シミュレーション時刻よりも先行している場合に、前記条件変化シミュレーション時刻以前のシミュレーション時刻の状態を保持している前記複製にシミュレーション計算を行わせる、分散シミュレーション方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、分散シミュレーションに関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
特許文献1は、大規模なLSI回路の動作をシミュレーションするために、分散環境上で分散シミュレーションを実行するシミュレーションプログラムを開示する。
【0003】
特許文献1においては、LSI回路システムが複数の部分に分割され、それぞれの部分がモデル化される。個々のモデルが、シミュレーションプログラムを用いてシミュレーションされる。複数のシミュレーションプログラムは互いに通信して時間やデータの同期を行う。
【0004】
特許文献1では、各シミュレーションプログラム間の時間同期機能を実現するため、スケジューラスレッドが実行される。それぞれのシミュレーションプログラムは、スケジューラスレッドにより時間が同期するように管理される。
【先行技術文献】
【特許文献】
【0005】
特開2012-63872号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
上記特許文献1の構成は、スケジューラスレッドが機能することにより、個々のシミュレーションプログラムの間でシミュレーション結果が矛盾することが防止される。しかし、例えば個々のシミュレーションプログラムの実行環境に差異がある場合、計算能力の高い環境のシミュレーションプログラムであっても、計算能力の低い環境のシミュレーションプログラムの実行完了まで待機しなければならず、計算能力が低い側に律速されてしまう。従って、従来の構成は、コンピュータ資源の有効活用という点で改善の余地があった。
【0007】
本開示は以上の事情に鑑みてされたものであり、その目的は、高速な計算が可能であり、コンピュータ資源を有効活用できる分散シミュレーションを実現することにある。
【課題を解決するための手段】
【0008】
本開示の解決しようとする課題は以上の如くであり、次にこの課題を解決するための手段とその効果を説明する。
【0009】
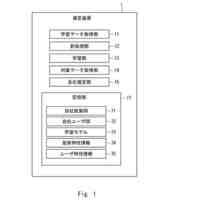
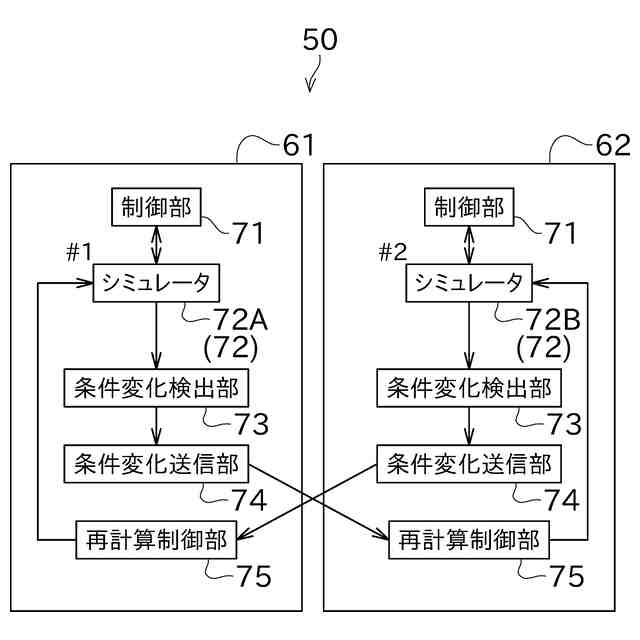
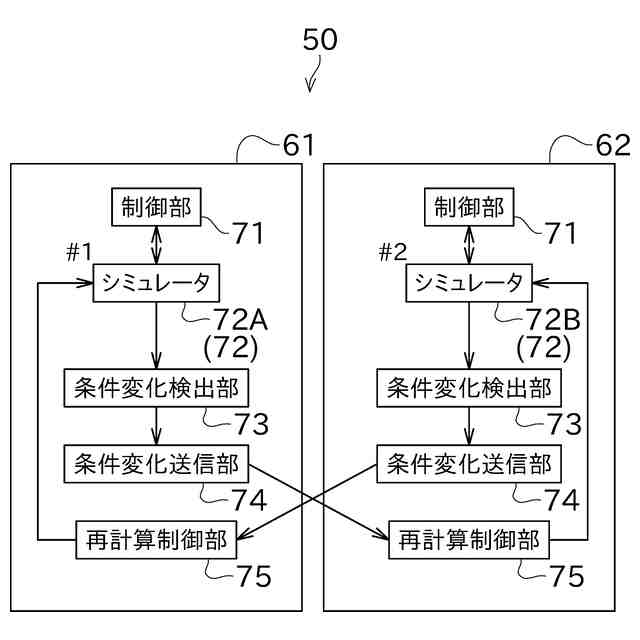
本開示の第1の観点によれば、以下の構成の分散シミュレーション装置が提供される。即ち、分散シミュレーション装置は、第1シミュレータと、第2シミュレータと、条件変化検出部と、再計算制御部と、を備える。前記第1シミュレータは、現実の時刻の進行速度より速い速度でシミュレーション時刻を進行させながら、第1ロボットのシミュレーション計算を行う。前記第2シミュレータは、前記第1シミュレータのシミュレーション時刻とは独立に、現実の時刻の進行速度より速い速度でシミュレーション時刻を進行させながら、第2ロボットのシミュレーション計算を行う。前記条件変化検出部は、前記第1シミュレータのシミュレーション計算結果に起因する、前記第2シミュレータの前記シミュレーション計算の条件の変化を検出する。前記再計算制御部は、前記第2シミュレータのシミュレーション時刻が、前記第2シミュレータのシミュレーション計算の条件が変化するシミュレーション時刻を示す条件変化シミュレーション時刻よりも先行している場合に、前記第2シミュレータのシミュレーション時刻を前記条件変化シミュレーション時刻又はそれより前のシミュレーション時刻まで戻し、戻されたシミュレーション時刻から前記第2シミュレータにシミュレーション計算を再び行わせる。
【0010】
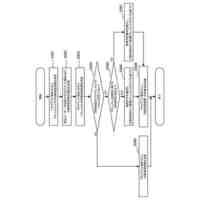
これにより、シミュレーション計算を、複数のシミュレータのそれぞれにおいてシミュレーション時刻を独立に進めながら分散的に行うことで、待機処理を回避し、シミュレーション結果を高速に得ることができる。従って、シミュレータに関するコンピュータ資源を効率的に活用することができる。また、シミュレーション計算においてロボットの相互作用が発生した場合は、影響を受ける側のシミュレーション時刻を戻して再計算することで、矛盾したシミュレーション結果が生じることを防止できる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
物品
1か月前
個人
RFタグ読取装置
17日前
個人
自動精算システム
1か月前
個人
自動精算システム
8日前
個人
売買システム
14日前
個人
保証金管理システム
1か月前
個人
救急搬送システム
1か月前
個人
管理サーバ
28日前
個人
発想支援方法及びシステム
3日前
個人
市場受発注システム
6日前
個人
分類処理プログラム及び方法
3日前
日本精機株式会社
車両用表示装置
16日前
日本精機株式会社
車両用表示装置
16日前
キヤノン株式会社
印刷装置
1か月前
個人
VRによる人体各部位の立体化
28日前
個人
生成AIとの常時接続システム
1か月前
井関農機株式会社
ロボット作業車両
8日前
株式会社MRC
集客システム
1か月前
株式会社SEKT
文字認識装置
1か月前
トヨタ自動車株式会社
分析装置
1か月前
個人
未来型家系図構築システム
1か月前
キヤノン株式会社
情報処理装置
1か月前
株式会社COLORS
表示装置
1か月前
トヨタ自動車株式会社
推定装置
1か月前
キヤノン株式会社
印刷管理装置
1か月前
個人
コンテンツ開示順位判定システム
1か月前
キヤノン電子株式会社
業務管理システム
1か月前
ローム株式会社
ソース機器
1か月前
トヨタ自動車株式会社
表認識装置
1か月前
トヨタ自動車株式会社
作業評価装置
15日前
村田機械株式会社
人員配置システム
3日前
ダイハツ工業株式会社
移動支援装置
1か月前
富士通株式会社
情報処理プログラム
1か月前
株式会社LIFE
送迎管理システム
1か月前
個人
販売支援システム
8日前
トヨタ自動車株式会社
画像処理装置
29日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ