TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025008817
公報種別
公開特許公報(A)
公開日
2025-01-20
出願番号
2023111352
出願日
2023-07-06
発明の名称
給電システム、報知装置、報知方法及びプログラム
出願人
カシオ計算機株式会社
代理人
個人
主分類
H02J
7/00 20060101AFI20250109BHJP(電力の発電,変換,配電)
要約
【課題】エラーが発生した場合に、エラーの種別に応じて的確に報知を行う。
【解決手段】給電装置10は、ロボット20に対して非接触給電を行う。報知部16は、非接触給電の状態に応じて報知を行う。制御モジュール100は、給電装置10により非接触給電が行われている際にエラーが発生した場合、非接触給電を停止してから再開するリトライ処理を実行する。報知部16は、給電装置10により非接触給電が行われている際にエラーが発生していない場合、第1態様で報知を行う。報知部16は、給電装置10により非接触給電が行われている際にエラーが発生した場合であって、且つ、発生したエラーが第1種別のエラーに該当する場合、リトライ処理を実行している際に第1態様で報知を行う。
【選択図】図5
特許請求の範囲
【請求項1】
ロボットに対して非接触給電を行う給電手段と、
前記非接触給電の状態に応じて報知を行う報知手段と、
前記給電手段により前記非接触給電が行われている際にエラーが発生した場合、前記非接触給電を停止してから再開するリトライ処理を実行するリトライ処理手段と、を備え、
前記報知手段は、
前記給電手段により前記非接触給電が行われている際に前記エラーが発生していない場合、第1態様で報知を行い、
前記給電手段により前記非接触給電が行われている際に前記エラーが発生した場合であって、且つ、発生した前記エラーが第1種別のエラーに該当する場合、前記リトライ処理手段が前記リトライ処理を実行している際に前記第1態様で報知を行う、
ことを特徴とする給電システム。
続きを表示(約 1,100 文字)
【請求項2】
前記報知手段は、前記リトライ処理により前記第1種別のエラーが解消しない場合、前記第1態様とは異なる第2態様で報知を行う、
ことを特徴とする請求項1に記載の給電システム。
【請求項3】
前記報知手段は、前記給電手段により前記非接触給電が行われている際に前記エラーが発生した場合であって、且つ、発生した前記エラーが第2種別のエラーに該当する場合、前記リトライ処理手段が前記リトライ処理を実行している際に前記第1態様とは異なる第3態様で報知を行う、
ことを特徴とする請求項1又は2に記載の給電システム。
【請求項4】
前記報知手段は、前記リトライ処理により前記第2種別のエラーが解消しない場合、第4態様で報知を行う、
ことを特徴とする請求項3に記載の給電システム。
【請求項5】
前記報知手段は、前記リトライ処理により前記エラーが解消した場合、前記第1態様で報知を行う、
ことを特徴とする請求項1又は2に記載の給電システム。
【請求項6】
前記第1種別のエラーは、前記給電手段における温度に関するエラーである、
ことを特徴とする請求項1又は2に記載の給電システム。
【請求項7】
前記第2種別のエラーは、前記給電手段により前記非接触給電が行われている際に前記ロボットに送信された送信電力と前記ロボットにより受信された受信電力との差分に基づいて検知される、
ことを特徴とする請求項1又は2に記載の給電システム。
【請求項8】
前記給電システムは、給電装置と、前記ロボットと、を備え、
前記給電装置は、前記給電手段と、前記報知手段と、前記リトライ処理手段と、を備える、
ことを特徴とする請求項1又は2に記載の給電システム。
【請求項9】
前記給電システムは、給電装置と、前記ロボットと、を備え、
前記給電装置は、前記給電手段と、前記リトライ処理手段と、を備え、
前記ロボットは、前記報知手段、を備える、
ことを特徴とする請求項1又は2に記載の給電システム。
【請求項10】
前記給電システムは、給電装置と、前記ロボットと、報知装置と、を備え、
前記給電装置は、前記給電手段と、前記リトライ処理手段と、を備え、
前記報知装置は、前記報知手段、を備える、
ことを特徴とする請求項1又は2に記載の給電システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、給電システム、報知装置、報知方法及びプログラムに関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
装置の動作中に何らかのエラーが発生した場合にユーザに報知を行う技術が知られている。例えば特許文献1は、ハードディスク駆動装置において、ハードディスクの読取り又は書込み動作を試みるリトライ中にリトライ中であることを表示し、リトライの時間が所定の時間より長くなったときに警告表示する技術を開示している。
【先行技術文献】
【特許文献】
【0003】
実全平03-110609号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記のようなエラーの報知を行う技術において、エラーの種別によっては、エラーを解消するためにユーザの対処が必要な場合とユーザの対処が必要でない場合とがあり得る。ユーザの対処が直ぐには必要でないエラーが発生した場合、そのエラーを報知すると、かえってユーザを煩わせることにつながる。このような事情のもと、エラーが発生した場合に、エラーの種別に応じて的確に報知を行うことが求められている。
【0005】
本発明は、以上のような課題を解決するためのものであり、エラーが発生した場合に、エラーの種別に応じて的確に報知を行うことが可能な給電システム、報知装置、報知方法及びプログラムを提供することを目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するため、本発明に係る給電システムは、
ロボットに対して非接触給電を行う給電手段と、
前記非接触給電の状態に応じて報知を行う報知手段と、
前記給電手段により前記非接触給電が行われている際にエラーが発生した場合、前記非接触給電を停止してから再開するリトライ処理を実行するリトライ処理手段と、を備え、
前記報知手段は、
前記給電手段により前記非接触給電が行われている際に前記エラーが発生していない場合、第1態様で報知を行い、
前記給電手段により前記非接触給電が行われている際に前記エラーが発生した場合であって、且つ、発生した前記エラーが第1種別のエラーに該当する場合、前記リトライ処理手段が前記リトライ処理を実行している際に前記第1態様で報知を行う、
ことを特徴とする。
【発明の効果】
【0007】
本発明によれば、エラーが発生した場合に、エラーの種別に応じて的確に報知を行うことができる。
【図面の簡単な説明】
【0008】
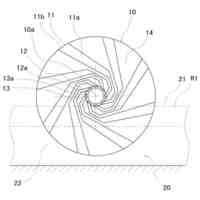
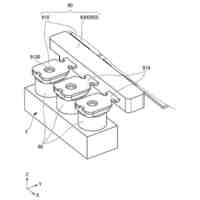
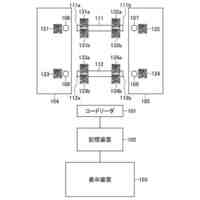
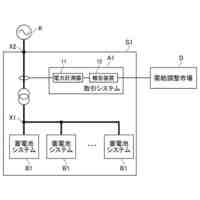
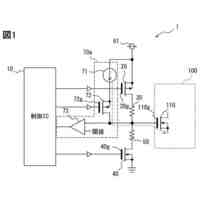
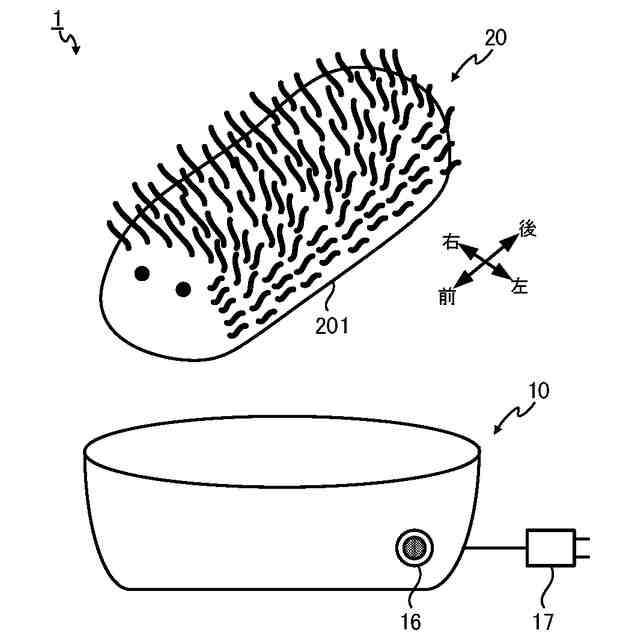
実施形態1に係る給電システムの全体構成の概略を示す図である。
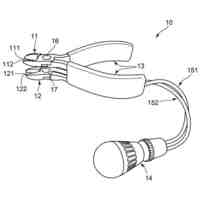
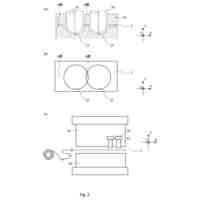
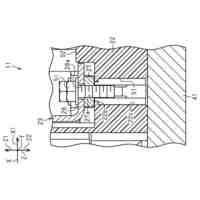
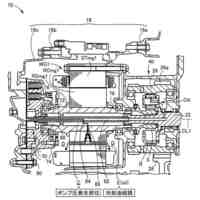
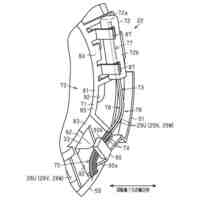
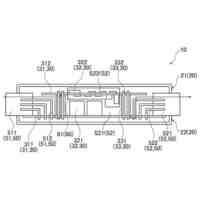
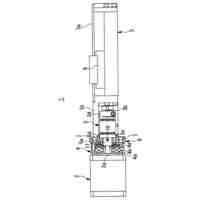
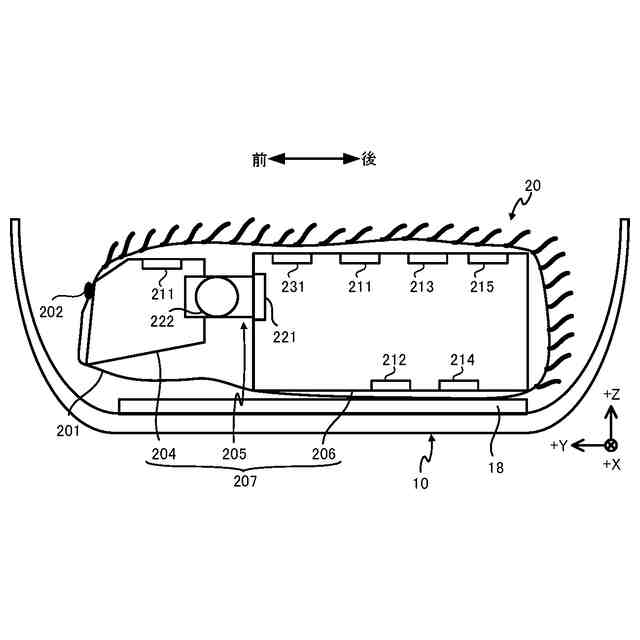
実施形態1に係るロボットを側面から見た断面図である。
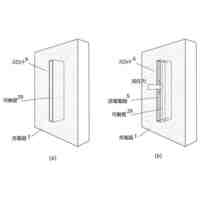
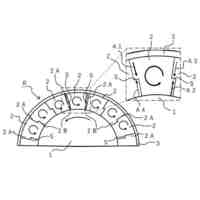
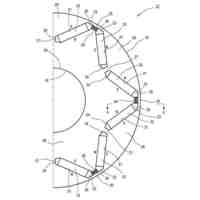
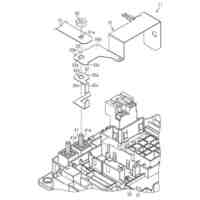
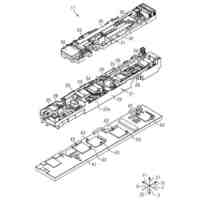
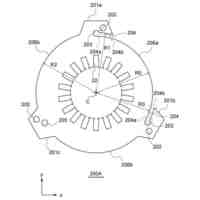
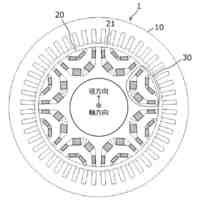
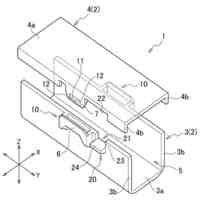
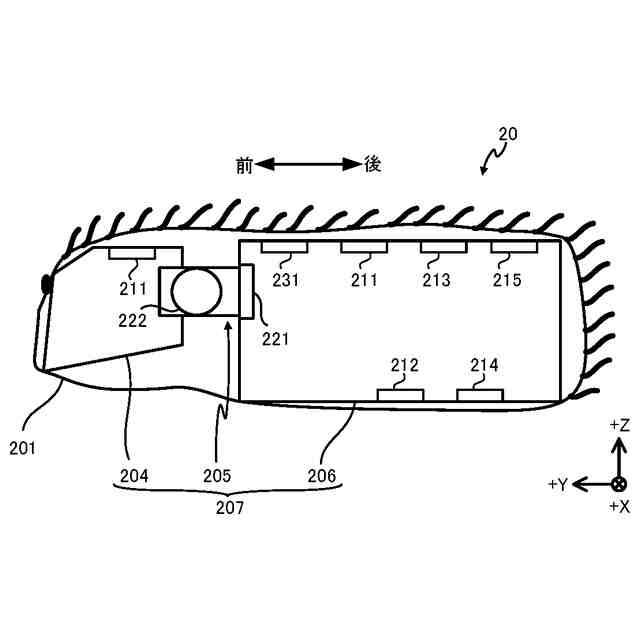
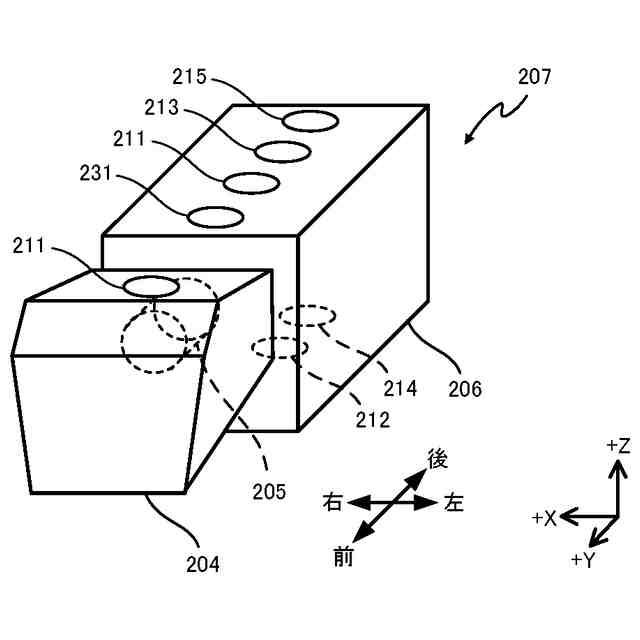
実施形態1に係るロボットの筐体を示す図である。
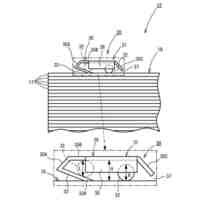
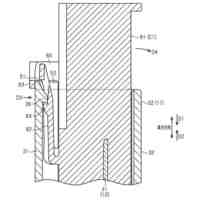
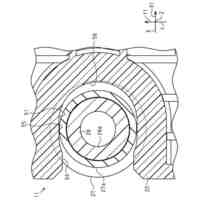
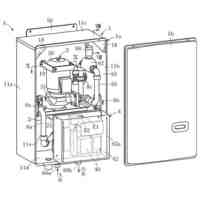
実施形態1に係る給電装置からロボットに給電される様子を示す図である。
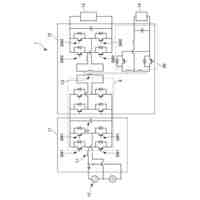
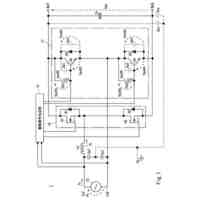
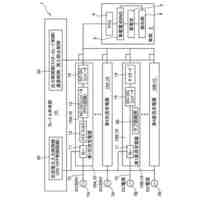
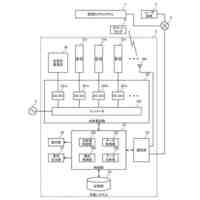
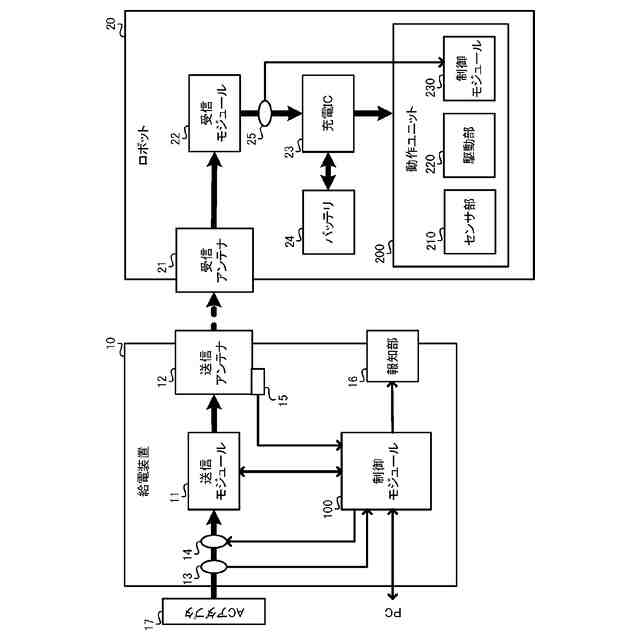
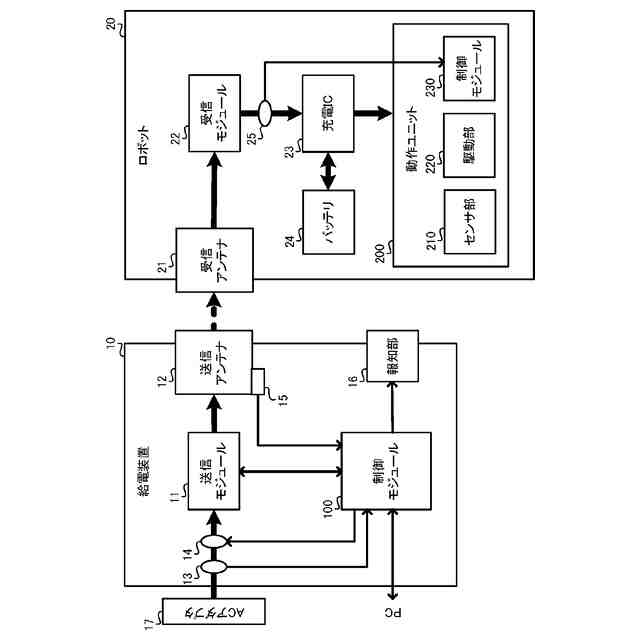
実施形態1に係る給電装置及びロボットのハードウェア構成を示すブロック図である。
実施形態1に係る給電装置における制御モジュールの構成を示すブロック図である。
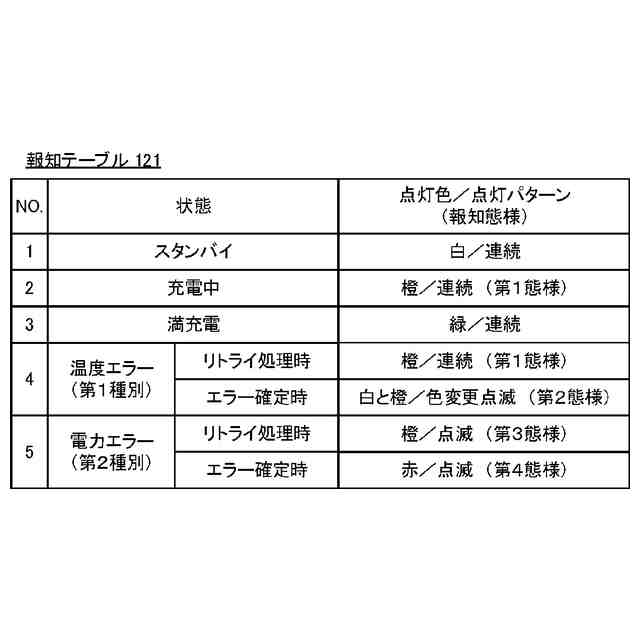
実施形態1に係る報知テーブルの例を示す図である。
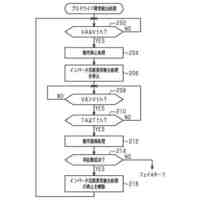
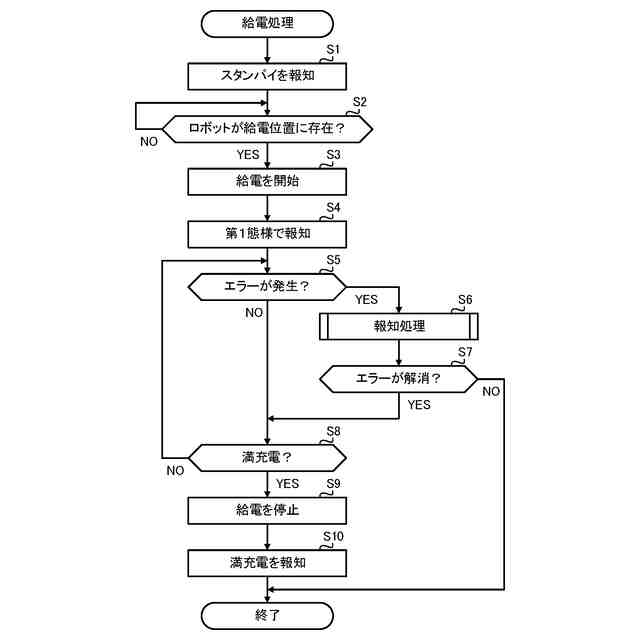
実施形態1に係る給電装置により実行される給電処理の流れを示すフローチャートである。
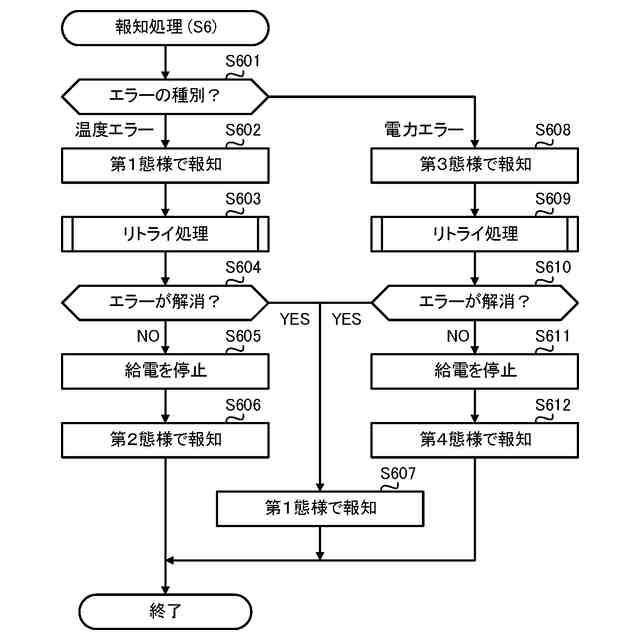
実施形態1に係る給電装置により実行される報知処理の流れを示すフローチャートである。
実施形態1に係る給電装置により実行されるリトライ処理の流れを示すフローチャートである。
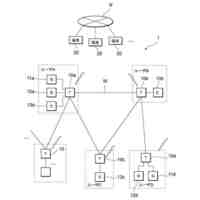
実施形態2に係る給電システムの全体構成の概略を示す図である。
実施形態2に係る報知装置の構成を示すブロック図である。
【発明を実施するための形態】
【0009】
以下、本発明の実施形態について、図面を参照して説明する。なお、図中同一又は相当する部分には同一符号を付す。
【0010】
(実施形態1)
図1に、実施形態1に係る給電システム1の構成を概略的に示す。給電システム1は、給電装置10と、ロボット20と、を備える。給電システム1は、非接触給電により給電装置10からロボット20に給電するシステムである。非接触給電は、ワイヤレス給電とも呼ばれ、ケーブルの接続、金属電極の接触等を介さずに給電側の装置から受電側の装置に対して電力を供給する技術である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
静電モータ
今日
個人
通電確認器具
7日前
株式会社アイシン
制御装置
9日前
株式会社ExH
接触ユニット
4日前
株式会社アイシン
車両用駆動装置
今日
トヨタ自動車株式会社
積層コア
今日
日産自動車株式会社
ロータ
今日
株式会社豊田自動織機
回転電機のロータ
今日
株式会社高砂製作所
力率改善回路
4日前
株式会社豊田自動織機
回転電機のロータ
7日前
アズビル株式会社
配線確認システム
今日
住友電装株式会社
電気接続箱
4日前
住友電装株式会社
電気接続箱
8日前
住友電装株式会社
電気接続箱
7日前
住友電装株式会社
電気接続箱
8日前
住友電装株式会社
電気接続箱
8日前
株式会社ジェイテクト
制御装置
7日前
本田技研工業株式会社
回転電機
7日前
トヨタ自動車株式会社
電動車両
7日前
ダイハツ工業株式会社
クレードル装置
7日前
富士電機株式会社
電力変換装置
7日前
本田技研工業株式会社
回転電機
4日前
株式会社ダイヘン
電力システム
4日前
株式会社豊田自動織機
回転電機
4日前
トヨタ自動車株式会社
電動車両
今日
株式会社ダイヘン
電力システム
4日前
株式会社JVCケンウッド
充電システム
7日前
株式会社日立製作所
回転電機
今日
個人
電力管理装置及び電力管理システム
1日前
株式会社豊田自動織機
電動圧縮機
今日
株式会社デンソー
駆動回路
4日前
矢崎総業株式会社
電気接続箱
7日前
矢崎総業株式会社
プロテクタ
7日前
矢崎総業株式会社
電気接続箱
7日前
株式会社ノーリツ
モータ動作機構ユニット
7日前
株式会社マツイ
一軸アクチュエータ
7日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ