TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025004902
公報種別
公開特許公報(A)
公開日
2025-01-16
出願番号
2023104788
出願日
2023-06-27
発明の名称
自動運転車両
出願人
トヨタ自動車株式会社
代理人
弁理士法人高田・高橋国際特許事務所
主分類
B60W
50/00 20060101AFI20250108BHJP(車両一般)
要約
【課題】車両の自動運転を事後的に検証するためのデータを適切に保存すること。
【解決手段】車両はその周囲の物体を認識するためのセンサを備える。車両が備える自動運転システムは自動運転の実行時にセンサで取得されたデータを保存する。自動運転システムは車両の速度が低い場合は速度が高い場合よりもセンサで取得されたデータの保存距離を抑制する。また、データを保存可能な記憶領域の空き容量が少ない場合、自動運転システムは空き容量が多い場合よりも車両の最大速度を抑制する。
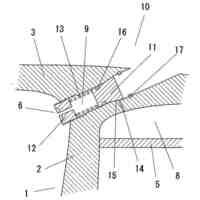
【選択図】図3
特許請求の範囲
【請求項1】
自動運転が可能な車両において、
前記車両の周囲の物体を認識するためのセンサと、
少なくとも一つのプロセッサと、
前記少なくとも一つのプロセッサに実行される複数のインストラクションを記憶した少なくとも一つのメモリと、を備え、
前記複数のインストラクションは、前記少なくとも一つのプロセッサに、
前記自動運転の実行時に前記センサで取得されたデータを保存することと、
前記車両の速度が低い場合は前記速度が高い場合よりも前記データの保存距離を抑制することと、を実行させるように構成されている
ことを特徴とする車両。
続きを表示(約 850 文字)
【請求項2】
請求項1に記載の車両において、
前記複数のインストラクションは、前記少なくとも一つのプロセッサに、
前記データを保存可能な記憶領域の空き容量が少ない場合は前記空き容量が多い場合よりも前記車両の最大速度を抑制すること、をさらに実行させるように構成されている
ことを特徴とする車両。
【請求項3】
請求項1又は2に記載の車両において、
前記センサは、前記車両の前方の物体を認識するための前方センサと、前記車両の後方の物体を認識するための後方センサと、を含み、
前記複数のインストラクションは、前記少なくとも一つのプロセッサに、
前記速度が低い場合は前記速度が高い場合よりも前記前方センサで取得された前方データの保存距離を抑制することと、
前記車両が走行する複数車線道路に設定されている最大速度が低い場合は前記最大速度が高い場合よりも前記後方センサで取得された後方データの保存距離を抑制することと、を実行させるように構成されている
ことを特徴とする車両。
【請求項4】
請求項1に記載の車両において、
前記センサはLiDARであり、
前記複数のインストラクションは、前記少なくとも一つのプロセッサに、
前記LiDARで取得された点群データの保存距離を前記速度に応じて変化させること、を実行させるように構成されている
ことを特徴とする車両。
【請求項5】
請求項1に記載の車両において、
前記センサはカメラであり、
前記複数のインストラクションは、前記少なくとも一つのプロセッサに、
前記カメラの画像圧縮率或いはサンプリングレートを前記速度に応じて変化させることにより、前記カメラで取得された画像データの有効距離を前記速度に応じて変化させること、を実行させるように構成されている
ことを特徴とする車両。
発明の詳細な説明
【技術分野】
【0001】
本開示は、自動運転が可能な車両に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
機械学習モデルを利用して車両の自動運転を行う技術が知られている。特許文献1は、機械学習モデルの学習に使用可能な訓練データを収集する方法を開示している。本開示に関連する技術分野の技術水準を示す文献としては、特許文献1の他にも特許文献2及び特許文献3を例示することができる。
【先行技術文献】
【特許文献】
【0003】
国際公開第2019/116423号
特許第6761002号公報
国際公開第2021/241189号
【発明の概要】
【発明が解決しようとする課題】
【0004】
車両の自動運転を事後的に検証するための方法として、自動運転の実行時に生成される自動運転データをログデータとして車載記憶装置に保存することが考えられる。但し、車載記憶装置の容量には限界があるため、最低限必要なログデータを保存できないような状況を回避することが望まれる。
【0005】
本開示の1つの目的は、車両の自動運転を事後的に検証するためのデータの記憶領域の空き容量のひっ迫を抑えることができる技術を提供することにある。
【課題を解決するための手段】
【0006】
上記目的を達成するために、本開示は自動運転が可能な車両を提供する。本開示の車両は車両の周囲の物体を認識するためのセンサと、少なくとも一つのプロセッサと、少なくとも一つのプロセッサにより実行される複数のインストラクションを記憶した少なくとも一つのメモリとを備える。複数のインストラクションは少なくとも一つのプロセッサに自動運転の実行時にセンサで取得されたデータを保存させ、車両の速度が低い場合は車両の速度が高い場合よりもデータの保存距離を抑制させる。
【発明の効果】
【0007】
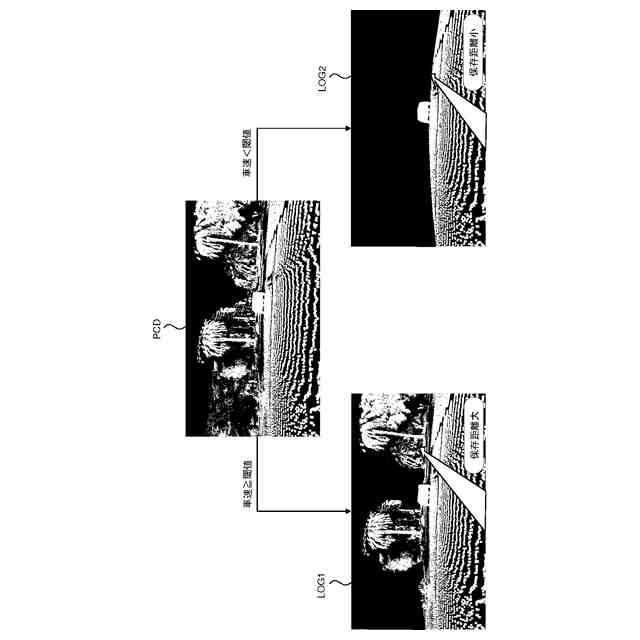
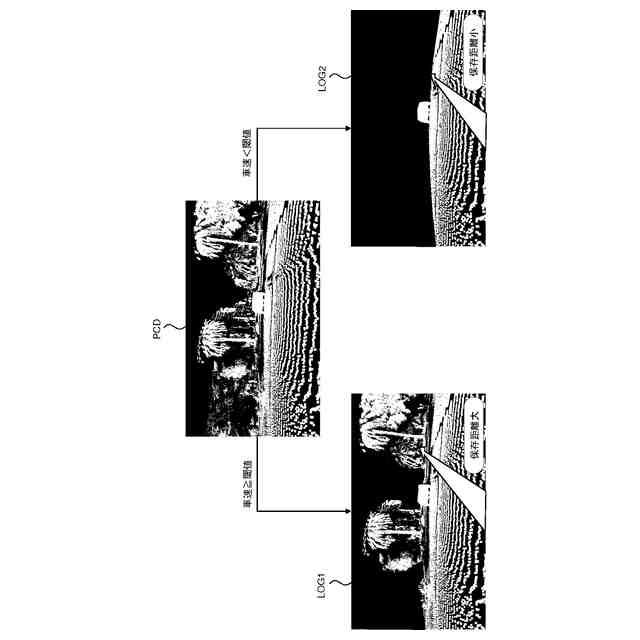
車両の速度が低い場合は、車両の速度が高い場合よりも物体の認識を行うべき距離は短くて済む。ゆえに、車両の速度が低い場合は、車両の速度が高い場合よりも自動運転の事後的な検証を行う上で保存すべきデータの保存距離を抑制することができる。本開示の車両によれば、車両の速度に応じてデータの保存距離を抑制することにより、データの記憶領域の空き容量のひっ迫を抑えることができる。
【図面の簡単な説明】
【0008】
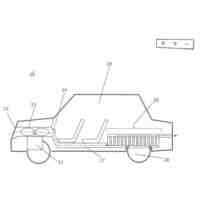
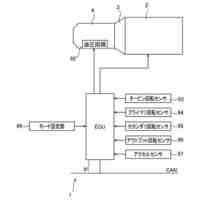
実施の形態に係る車両の自動運転に関連する構成例を示すブロック図である。
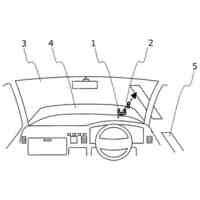
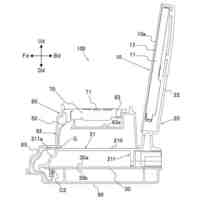
実施の形態に係る自動運転システムの構成例を示す概念図である。
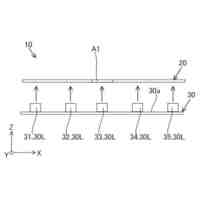
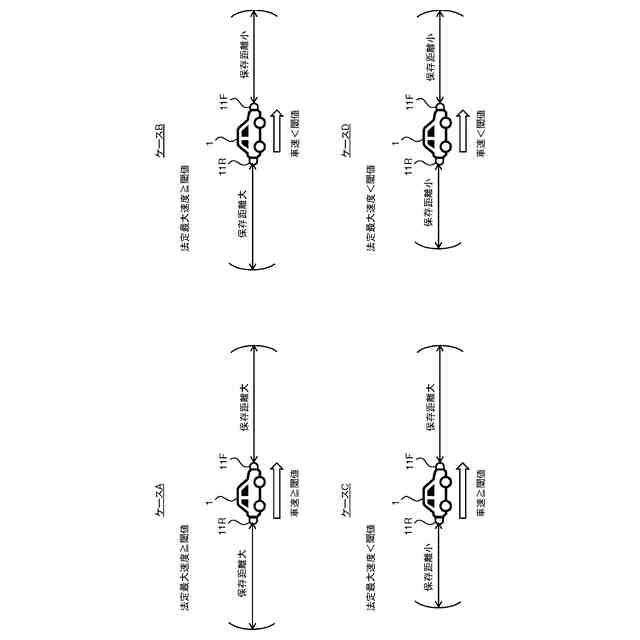
実施の形態に係るデータ保存量の低減処理の第1の例を説明するための概念図である。
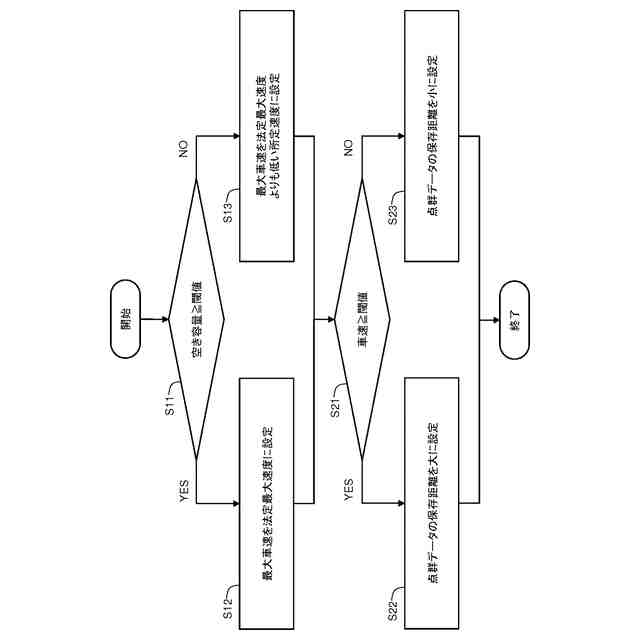
実施の形態に係るデータ保存量の低減処理の第2の例を説明するためのフロー図である。
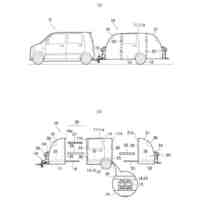
実施の形態に係るデータ保存量の低減処理の第3の例を説明するための概念図である。
実施の形態に係るデータ保存量の低減処理の第4の例を説明するためのフロー図である。
【発明を実施するための形態】
【0009】
1.車両の自動運転
図1は本実施の形態に係る車両1の自動運転に関連する構成例を示すブロック図である。自動運転とは、車両1の操舵、加速、及び減速のうち少なくとも1つをオペレータによる運転操作によらず自動的に行うことである。自動運転は完全自動運転だけでなく、リスク回避制御、レーンキープアシスト制御、等も含む概念である。オペレータは車両1に搭乗するドライバであってもよいし、車両1を遠隔操作する遠隔オペレータであってもよい。
【0010】
車両1はセンサ群10、自動運転装置20、及び車両制御装置30を含んでいる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
車両
2か月前
個人
授乳用車両
1日前
個人
眼科手術車
9日前
個人
自動車運転補助装置
1か月前
日本精機株式会社
表示装置
23日前
井関農機株式会社
作業車両
1日前
井関農機株式会社
作業車両
1か月前
個人
台車用車輪止め具
10日前
個人
空気圧調節式ホイール。
3か月前
個人
キャンピングトレーラー
1か月前
日本精機株式会社
車外表示装置
3か月前
日本精機株式会社
運転支援装置
4か月前
東レ株式会社
車両用エアバッグ
4か月前
個人
自動車外部装着用しめ飾り
1か月前
日本精機株式会社
車載表示装置
1か月前
日本精機株式会社
表示システム
4か月前
エムケー精工株式会社
洗車装置
3か月前
個人
謝意シグナル装着車
25日前
日本精機株式会社
車載表示装置
25日前
日本精機株式会社
車両用表示装置
1日前
ダイハツ工業株式会社
車両
3か月前
日本精機株式会社
車両用表示装置
2か月前
日本精機株式会社
車両用表示装置
2か月前
株式会社青木製作所
タンクローリ
10日前
トヨタ自動車株式会社
車両
10日前
トヨタ自動車株式会社
車両
1か月前
日本精機株式会社
車両用表示装置
2か月前
日本精機株式会社
車両用表示装置
2か月前
日本精機株式会社
車両用表示装置
1か月前
日本精機株式会社
車両用表示装置
1か月前
日本精機株式会社
車両用表示装置
24日前
ダイハツ工業株式会社
車両
3か月前
株式会社SUBARU
車両
3か月前
日本精機株式会社
車両用表示装置
2か月前
豊田合成株式会社
車両
4か月前
エムケー精工株式会社
車両処理装置
3か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ