TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025004347
公報種別
公開特許公報(A)
公開日
2025-01-15
出願番号
2023103971
出願日
2023-06-26
発明の名称
歩行訓練システム、制御方法、及び制御プログラム
出願人
トヨタ自動車株式会社
代理人
個人
主分類
A61H
3/00 20060101AFI20250107BHJP(医学または獣医学;衛生学)
要約
【課題】適切に荷重値を求めることができる歩行訓練システム、制御方法、及び制御プログラムを提供すること。
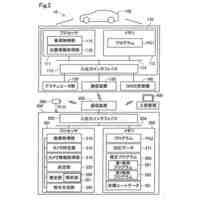
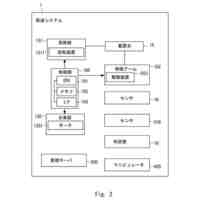
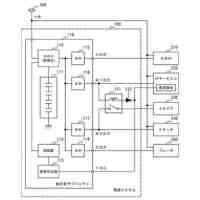
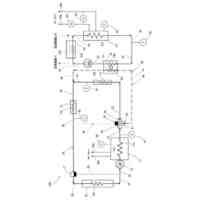
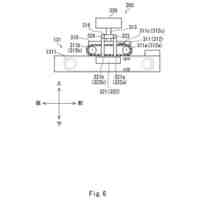
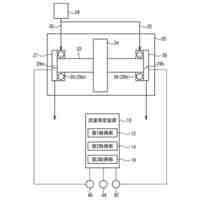
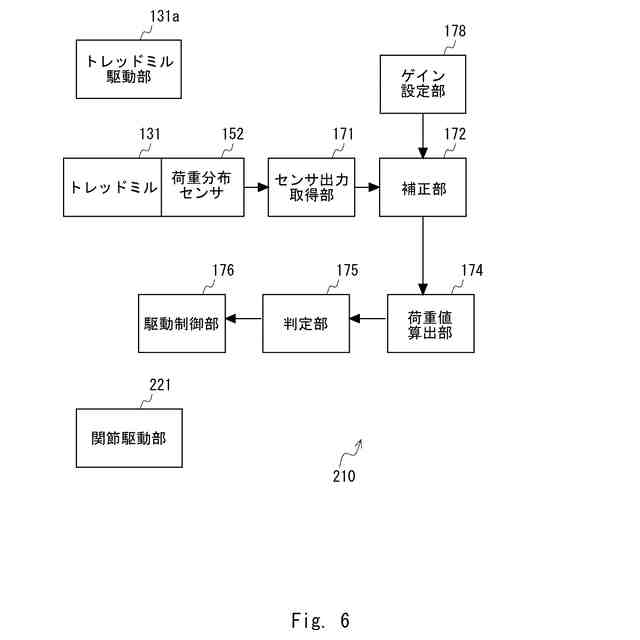
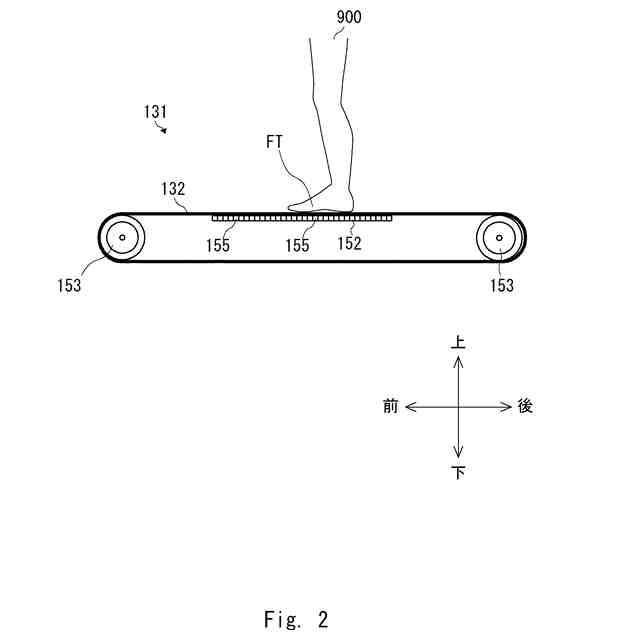
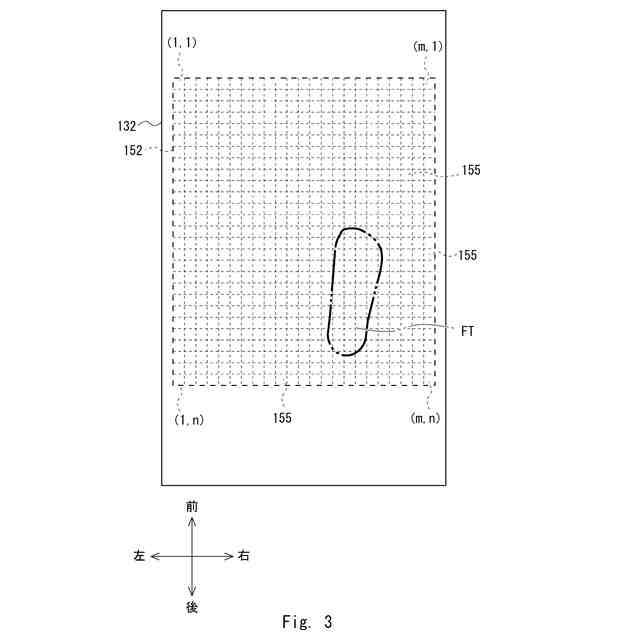
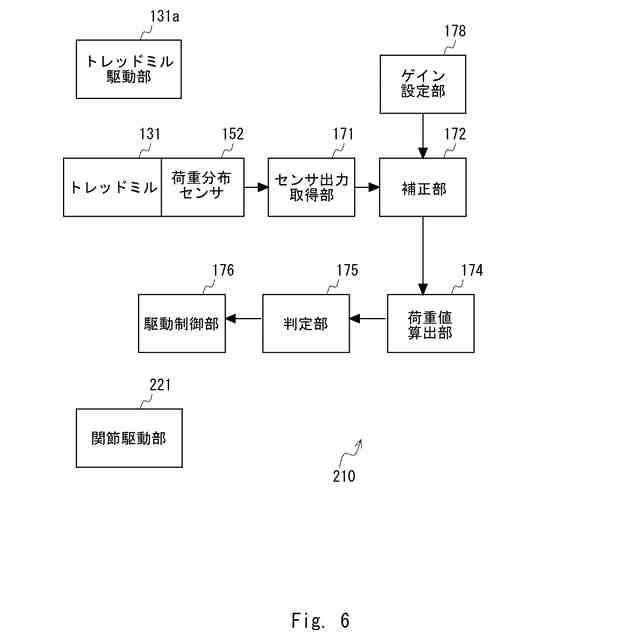
【解決手段】本実施の形態にかかる歩行訓練システム1は、ユーザが着地するベルト132を有するトレッドミル131と、2次元アレイ状に配列された複数のセンサ155を有し、ベルト132を介して加わる荷重を検出する荷重分布センサ152と、荷重分布センサのセンサからのセンサ出力を取得するセンサ出力取得部171と、ベルト132の移動速度に基づいて、それぞれのセンサ155からのセンサ出力を補正する補正部172と、補正部172で補正された補正値に基づいて、ユーザから受ける荷重値を算出する荷重値算出部174と、を備えている。
【選択図】図6
特許請求の範囲
【請求項1】
ユーザが着地するベルトを有するトレッドミルと、
2次元アレイ状に配列された複数のセンサを有し、前記ベルトを介して加わる荷重を検出する荷重分布センサと、
前記荷重分布センサのセンサからのセンサ出力を取得するセンサ出力取得部と、
前記ベルトの移動速度に基づいて、それぞれの前記センサからのセンサ出力を補正する補正部と、
前記補正部で補正された補正値に基づいて、前記ユーザから受ける荷重値を算出する荷重値算出部と、を備えた歩行訓練システム。
続きを表示(約 1,100 文字)
【請求項2】
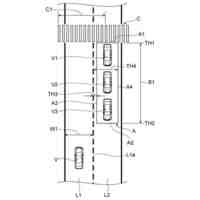
前記補正部が、前記ユーザが着地した領域の前端のセンサをライン毎に求め、
前記前端のセンサのセンサアドレスを基準として、前後方向のセンサアドレスに応じて前記センサ出力を補正する請求項1に記載の歩行訓練システム。
【請求項3】
前記補正部が、前後方向のセンサアドレスに応じた補正係数を用いて、前後方向に沿った一列分の前記センサの前記センサ出力を補正する請求項1、又は2に記載の歩行訓練システム。
【請求項4】
前記荷重分布センサが、前後方向に配列された1列のセンサの出力を順次読み出していく請求項1、又は2に記載の歩行訓練システム。
【請求項5】
前記ユーザの脚部に装着されたロボット脚と、
前記荷重値に基づいて前記ロボット脚を駆動する駆動制御部と、をさらに備えた請求項1、又は2に記載の歩行訓練システム。
【請求項6】
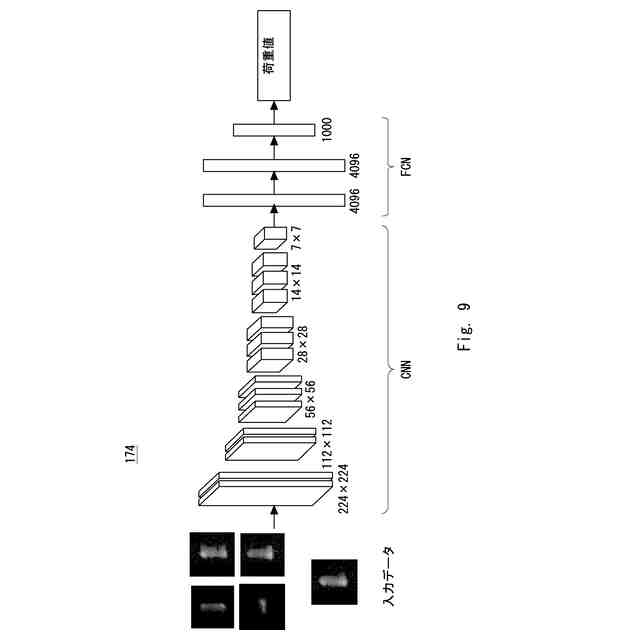
前記荷重値算出部が複数のセルの前記補正値を含む2次元データを入力として、畳み込み処理を行うCNNを有している請求項1、又は2に記載の歩行訓練システム。
【請求項7】
ユーザが着地するベルトを有するトレッドミルと、
2次元アレイ状に配列された複数のセンサを有し、前記ベルトを介して加わる荷重を検出する荷重分布センサと、を備えた歩行訓練システムの制御方法であって、
前記荷重分布センサのセンサからのセンサ出力を取得するステップと、
前記ベルトの移動速度に基づいて、それぞれの前記センサからのセンサ出力を補正することで、補正値を求めるステップと、
前記補正値に基づいて、前記ユーザから受ける荷重値を算出するステップと、を備えた歩行訓練システムの制御方法。
【請求項8】
前記補正するステップでは
前記ユーザが着地した領域の前端のセンサをライン毎に求め、
前記前端のセンサのセンサアドレスを基準として、前後方向のセンサアドレスに応じて前記センサ出力を補正する請求項7に記載の歩行訓練システムの制御方法。
【請求項9】
前後方向のセンサアドレスに応じた補正係数を用いて、前記前後方向に沿った一列分の前記センサの前記センサ出力を補正する請求項7、又は8に記載の歩行訓練システムの制御方法。
【請求項10】
前記荷重分布センサが、前後方向に配列された1列のセンサの出力を順次読み出していく請求項7、又は8に記載の歩行訓練システムの制御方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、歩行訓練システム、制御方法、及び制御プログラムに関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
特許文献1には、圧力分布検出装置が開示されている。この圧力分布検出装置は、複数の駆動コイルと、複数の検出コイルとを備えている。さらに、駆動コイルと検出コイルと間の距離を一定に保つスペーサ手段とを備えている。駆動コイルはクッション材と電磁シールド体が設けられている。検出コイルには、クッション材と電磁結合可変体が設けられている。電磁結合可変体は、シート状の磁性体シートとなっている。
【先行技術文献】
【特許文献】
【0003】
特開2007-218892号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
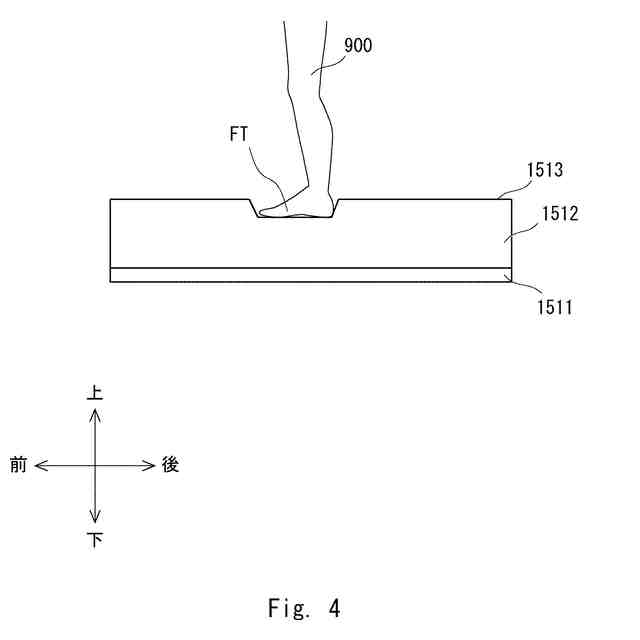
圧力分布を検出する場合、粘弾性体の変形量(変形応力)により、圧力(荷重)を検出する。粘弾性体をシート状に形成した場合,実際に荷重が加わった箇所の周辺領域についても粘弾性体が変形してしまう。荷重が加わっていない周辺領域にも荷重が検出されるため、高い精度で荷重を検出することが困難である。
【0005】
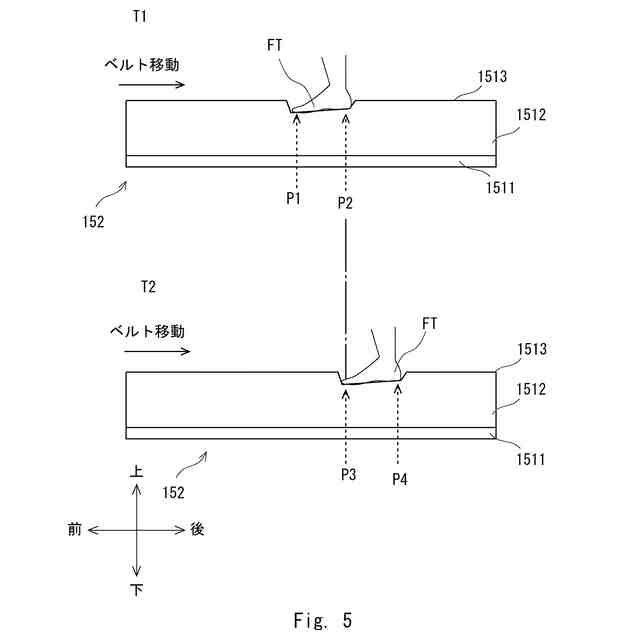
また、トレッドミルなどを用いた歩行訓練装置では、荷重分布に応じて歩行周期におけるタイミングを推定している。そさいて、歩行周期におけるタイミングに応じて、駆動制御を行っている。したがって、荷重分布を高い精度で検出することで、より適切な駆動制御を行うことができる。
【0006】
本発明は、以上の背景に鑑みなされたものであり、適切に荷重値を算出することができる歩行訓練システム、制御方法、及び制御プログラムを提供することを目的とする。
【課題を解決するための手段】
【0007】
本実施の形態にかかる歩行訓練システムは、ユーザが着地するベルトを有するトレッドミルと、2次元アレイ状に配列された複数のセンサを有し、前記ベルトを介して加わる荷重を検出する荷重分布センサと、前記荷重分布センサのセンサからのセンサ出力を取得するセンサ出力取得部と、前記ベルトの移動速度に基づいて、それぞれの前記センサからのセンサ出力を補正する補正部と、前記補正部で補正された補正値に基づいて、前記ユーザから受ける荷重値を算出する荷重値算出部と、を備えている。
【0008】
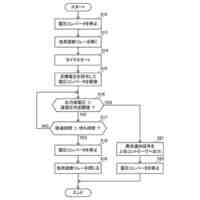
上記の歩行訓練システムにおいて、前記補正部が、前記ユーザが着地した領域の前端のセンサをライン毎に求め、前記前端のセンサのセンサアドレスを基準として、前後方向のセンサアドレスに応じて前記センサ出力を補正するようにしてもよい。
【0009】
上記の歩行訓練システムにおいて、前記補正部が前後方向のセンサアドレスに応じた補正係数を用いて、前後方向に沿った一列分の前記センサの前記センサ出力を補正するようにしてもよい。
【0010】
上記の歩行訓練システムにおいて、前記荷重分布センサが、前後方向に配列された1列のセンサの出力を順次読み出していくようにしてもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
トヨタ自動車株式会社
車両
7日前
トヨタ自動車株式会社
車両
7日前
トヨタ自動車株式会社
車両
7日前
トヨタ自動車株式会社
車両
今日
トヨタ自動車株式会社
システム
6日前
トヨタ自動車株式会社
システム
6日前
トヨタ自動車株式会社
システム
6日前
トヨタ自動車株式会社
蓄電セル
7日前
トヨタ自動車株式会社
駆動装置
7日前
トヨタ自動車株式会社
金型装置
6日前
トヨタ自動車株式会社
制御方法
6日前
トヨタ自動車株式会社
積層コア
7日前
トヨタ自動車株式会社
車載隔壁
6日前
トヨタ自動車株式会社
二次電池
6日前
トヨタ自動車株式会社
車両用架台
8日前
トヨタ自動車株式会社
牽引フック
今日
トヨタ自動車株式会社
サーバ装置
7日前
トヨタ自動車株式会社
リンク機構
8日前
トヨタ自動車株式会社
位相測定方法
6日前
トヨタ自動車株式会社
配送システム
6日前
トヨタ自動車株式会社
電源システム
6日前
トヨタ自動車株式会社
ルーフラック
6日前
トヨタ自動車株式会社
運転支援装置
6日前
トヨタ自動車株式会社
動作補助装具
6日前
トヨタ自動車株式会社
情報処理装置
6日前
トヨタ自動車株式会社
画像提供装置
7日前
トヨタ自動車株式会社
駐車支援装置
6日前
トヨタ自動車株式会社
燃料電池車両
6日前
トヨタ自動車株式会社
電圧変換装置
6日前
トヨタ自動車株式会社
表示制御装置
6日前
トヨタ自動車株式会社
情報処理装置
6日前
トヨタ自動車株式会社
評価システム
今日
トヨタ自動車株式会社
作業評価装置
7日前
トヨタ自動車株式会社
流量測定装置
8日前
トヨタ自動車株式会社
車両制御装置
今日
トヨタ自動車株式会社
情報処理装置
今日
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ