TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025002193
公報種別
公開特許公報(A)
公開日
2025-01-09
出願番号
2023102189
出願日
2023-06-22
発明の名称
運転支援装置
出願人
トヨタ自動車株式会社
,
株式会社デンソー
代理人
個人
,
個人
,
個人
,
個人
主分類
G08G
1/16 20060101AFI20241226BHJP(信号)
要約
【課題】横断歩道の手前において、自車両の運転支援をより適切に行う。
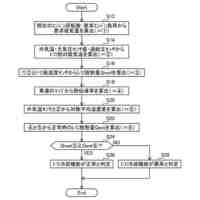
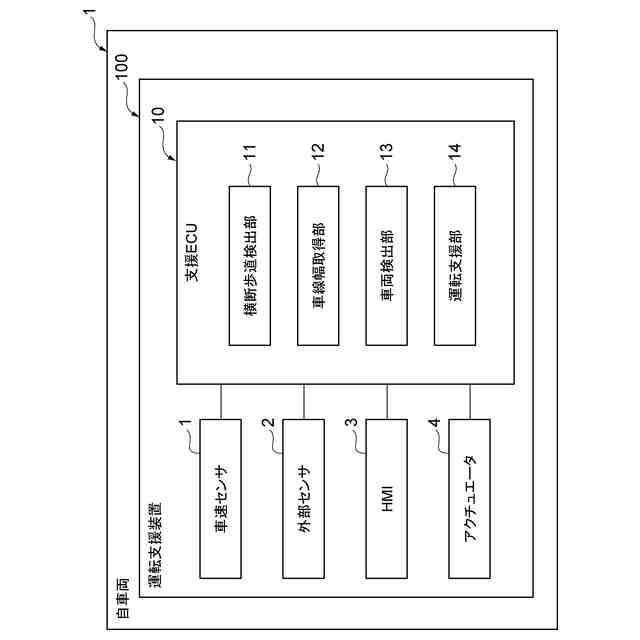
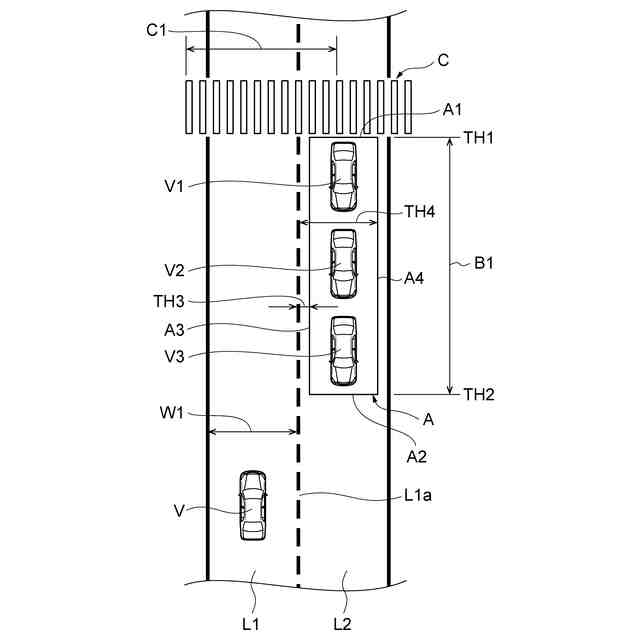
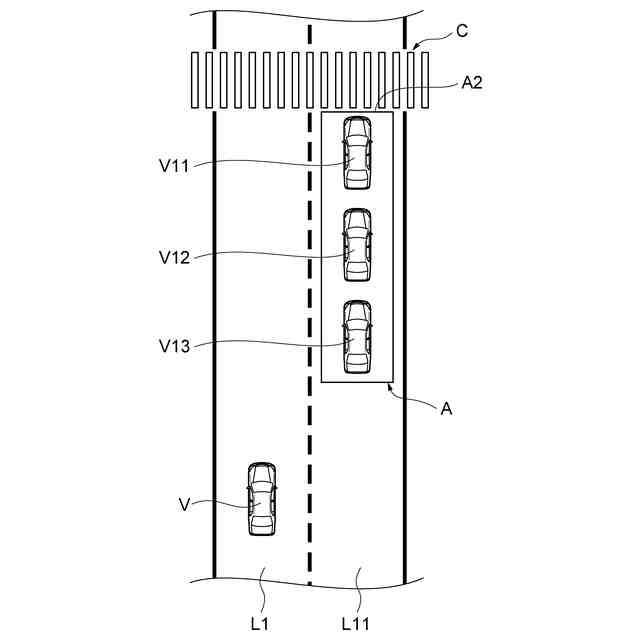
【解決手段】運転支援装置100は、カメラの撮像情報に基づいて、自車両Vの前方の横断歩道長さC1を検出する横断歩道検出部11と、自車線L1の車線幅Wを取得する車線幅取得部12と、取得された車線幅Wに基づいて基準横断歩道長さKを算出し、横断歩道長さC1が基準横断歩道長さKよりも短い場合、運転支援を行う運転支援部14と、を備える。
【選択図】図2
特許請求の範囲
【請求項1】
隣接車線が隣接する自車線上を走行する自車両の運転支援を行う運転支援装置であって、
カメラの撮像情報に基づいて、前記自車両の前方の横断歩道の延在方向の長さである横断歩道長さを検出する横断歩道検出部と、
前記自車線の車線幅を取得する車線幅取得部と、
取得された前記車線幅に基づいて基準横断歩道長さを算出し、検出された前記横断歩道長さが算出した前記基準横断歩道長さよりも短い場合、前記自車両の乗員への報知、前記自車両の操舵制御、及び減速制御の少なくともいずれかを含む前記運転支援を行う運転支援部と、
を備える、運転支援装置。
続きを表示(約 350 文字)
【請求項2】
前記自車線の側方領域に他車両を検出する車両検出エリアを設定し、設定した前記車両検出エリア内の前記他車両の有無を検出する車両検出部を更に備え、
前記運転支援部は、前記車両検出エリア内に前記他車両が検出され、かつ検出された前記横断歩道長さが算出した前記基準横断歩道長さよりも短い場合、前記運転支援を行う、請求項1に記載の運転支援装置。
【請求項3】
前記車両検出部は、前記車両検出エリア内における予め定められた車速閾値以下の前記他車両の有無を検出し、
前記運転支援部は、前記車両検出エリア内に前記車速閾値以下の前記他車両が検出され、かつ検出された前記横断歩道長さが算出した前記基準横断歩道長さよりも短い場合、前記運転支援を行う、請求項2に記載の運転支援装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、自車両の運転支援を行う運転支援装置に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
従来より、車両の運転支援装置は、横断歩道を渡ろうとしている歩行者等を検出すると、減速等の運転支援を行っている。例えば、特許文献1には、自車両に搭載されたカメラの撮像画像に加え、外部のカメラの撮像画像も利用して横断歩道近傍の歩行者の有無を判定し、報知等の運転支援を行うことが記載されている。
【先行技術文献】
【特許文献】
【0003】
特開2022-148428号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
自車線に隣接する隣接車線に他車両が存在すると、他車両によって死角が生じ、横断歩道を渡ろうとする歩行者等の検出が困難になることがある。また、上記特許文献1には外部のカメラの撮像画像を利用することが記載されているものの、このような外部のカメラの撮像画像を取得することが困難なことがある。
【0005】
このため、本開示は、横断歩道の手前において、自車両の運転支援をより適切に行うことが可能な運転支援装置について説明する。
【課題を解決するための手段】
【0006】
本開示の一態様は、隣接車線が隣接する自車線上を走行する自車両の運転支援を行う運転支援装置であって、カメラの撮像情報に基づいて、自車両の前方の横断歩道の延在方向の長さである横断歩道長さを検出する横断歩道検出部と、自車線の車線幅を取得する車線幅取得部と、取得された車線幅に基づいて基準横断歩道長さを算出し、検出された横断歩道長さが算出した基準横断歩道長さよりも短い場合、自車両の乗員への報知、自車両の操舵制御、及び減速制御の少なくともいずれかを含む運転支援を行う運転支援部と、を備える。
【0007】
上記の運転支援装置は、自車線の側方領域に他車両を検出する車両検出エリアを設定し、設定した車両検出エリア内の他車両の有無を検出する車両検出部を更に備え、車両検出部は、車両検出エリア内における予め定められた車速閾値以下の他車両の有無を検出し、運転支援部は、車両検出エリア内に車速閾値以下の他車両が検出され、かつ検出された横断歩道長さが算出した基準横断歩道長さよりも短い場合、運転支援を行ってもよい。
【発明の効果】
【0008】
本開示の一態様によれば、横断歩道の手前において、自車両の運転支援をより適切に行うことができる。
【図面の簡単な説明】
【0009】
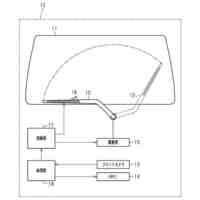
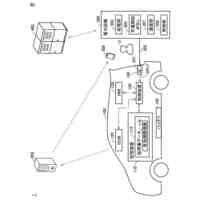
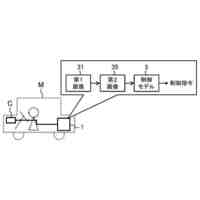
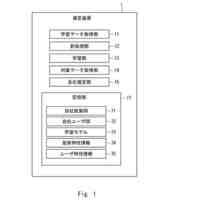
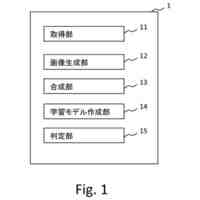
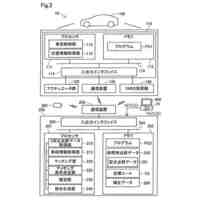
図1は、実施形態に係る運転支援装置の一例を示すブロック図である。
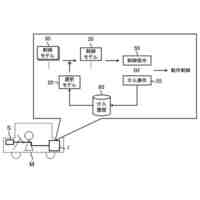
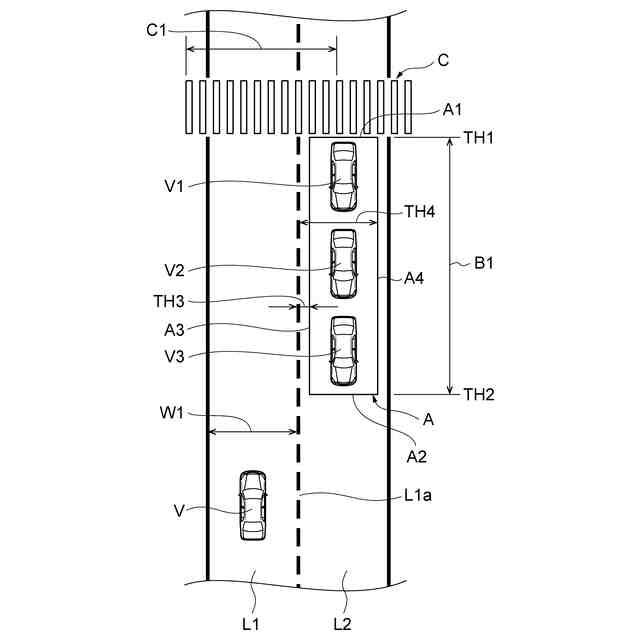
図2は、横断歩道の手前に設定される車両検出エリアを示す上面図である。
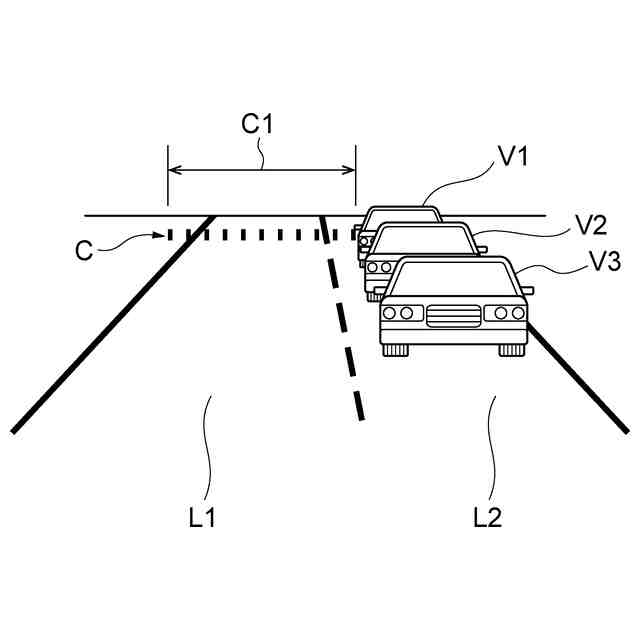
図3は、連なった対向車両が存在する場合に、自車両から横断歩道を見た様子を示す概略図である。
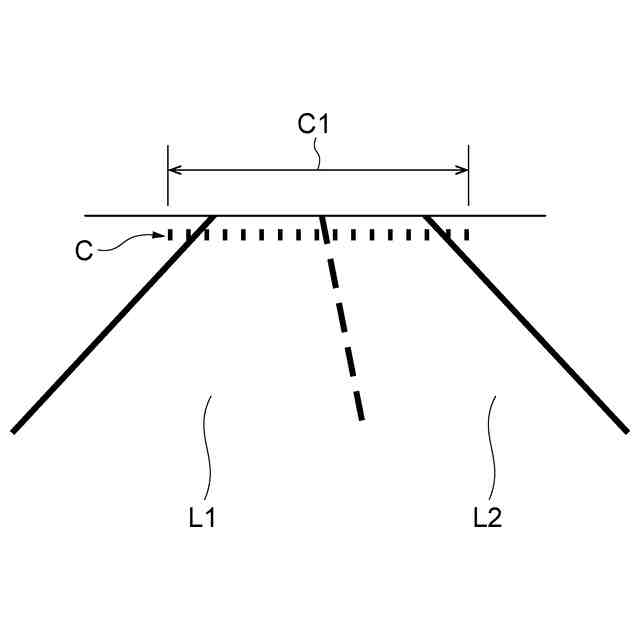
図4は、対向車両が存在しない場合に、自車両から横断歩道を見た様子を示す概略図である。
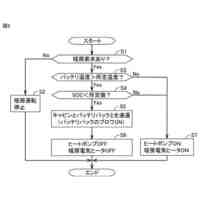
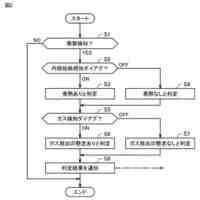
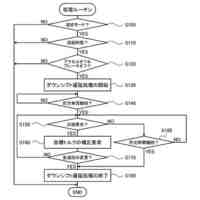
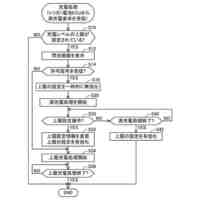
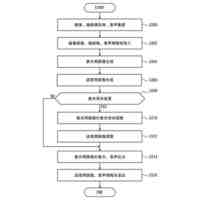
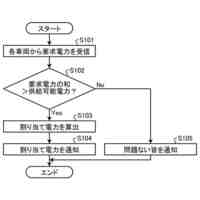
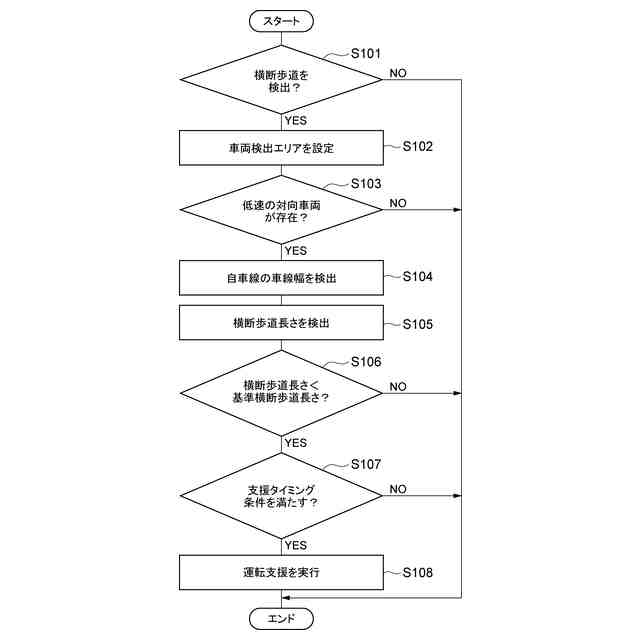
図5は、運転支援装置において行われる運転支援処理の流れを示すフローチャートである。
図6は、変形例に係る道路状況を示す上面図である。
【発明を実施するための形態】
【0010】
以下、例示的な実施形態について図面を参照しながら説明する。なお、各図において、同一又は相当する要素同士には同一符号を付し、重複する説明を省略する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
トヨタ自動車株式会社
方法
15日前
トヨタ自動車株式会社
車両
23日前
トヨタ自動車株式会社
車両
23日前
トヨタ自動車株式会社
車両
23日前
トヨタ自動車株式会社
車両
24日前
トヨタ自動車株式会社
電池
22日前
トヨタ自動車株式会社
車両
22日前
トヨタ自動車株式会社
車両
22日前
トヨタ自動車株式会社
電池
22日前
トヨタ自動車株式会社
車両
2日前
トヨタ自動車株式会社
車両
2日前
トヨタ自動車株式会社
車両
15日前
トヨタ自動車株式会社
車両
2日前
トヨタ自動車株式会社
車両
3日前
トヨタ自動車株式会社
電動車
22日前
トヨタ自動車株式会社
電動車
24日前
トヨタ自動車株式会社
電動車
24日前
トヨタ自動車株式会社
八方弁
23日前
トヨタ自動車株式会社
電動車
29日前
トヨタ自動車株式会社
モータ
24日前
トヨタ自動車株式会社
蓄電セル
2日前
トヨタ自動車株式会社
制御装置
22日前
トヨタ自動車株式会社
推定装置
22日前
トヨタ自動車株式会社
制御装置
15日前
トヨタ自動車株式会社
システム
1日前
トヨタ自動車株式会社
蓄電セル
15日前
トヨタ自動車株式会社
内燃機関
22日前
トヨタ自動車株式会社
解析装置
15日前
トヨタ自動車株式会社
制御装置
29日前
トヨタ自動車株式会社
内燃機関
15日前
トヨタ自動車株式会社
制御装置
29日前
トヨタ自動車株式会社
制御装置
22日前
トヨタ自動車株式会社
システム
22日前
トヨタ自動車株式会社
端末装置
24日前
トヨタ自動車株式会社
供給装置
15日前
トヨタ自動車株式会社
駆動装置
17日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ