TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024176907
公報種別
公開特許公報(A)
公開日
2024-12-19
出願番号
2023095777
出願日
2023-06-09
発明の名称
制御装置
出願人
トヨタ自動車株式会社
代理人
弁理士法人秀和特許事務所
主分類
B60W
50/08 20200101AFI20241212BHJP(車両一般)
要約
【課題】ユーザによる介入頻度を低減可能な自動制御技術を提供する。
【解決手段】本開示の一側面に係る制御装置は、選択モデルにより、複数の制御モデルから1つ以上の制御モデルを選択し、選択された1つ以上の制御モデルを使用して、移動体の制御指令を導出し、介入の操作がない場合、導出された制御指令に従って、移動体の動作を制御し、かつ介入の操作がある場合、導出された制御指令を破棄又は導出された制御指令にオーバーラップして、ユーザによる介入の操作に従い、移動体の動作を制御する。選択モデルは、ユーザの介入履歴から介入の発生を避けるよう1つ以上の制御モデルを選択するように構成される。
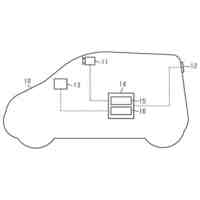
【選択図】図1
特許請求の範囲
【請求項1】
複数の制御モデル及び選択モデルを記憶する記憶部、並びに
制御部、
を備える制御装置であって、
前記各制御モデルは、移動体の移動を自動制御するために、制御指令を導出するように構成され、
前記制御部は、
前記選択モデルにより、前記複数の制御モデルから1つ以上の制御モデルを選択すること、
選択された前記1つ以上の制御モデルを使用して、前記移動体の制御指令を導出すること、
ユーザによる介入の操作がない場合、導出された前記制御指令に従って、前記移動体の動作を制御すること、及び
前記ユーザによる介入の操作がある場合、導出された前記制御指令を破棄又は導出された前記制御指令にオーバーラップして、前記ユーザによる介入の操作に従い、前記移動体の動作を制御すること、
を実行するように構成され、並びに
前記選択モデルは、前記ユーザの介入履歴から前記ユーザによる介入の発生を避けるよう前記1つ以上の制御モデルを選択するように構成されている、
制御装置。
続きを表示(約 530 文字)
【請求項2】
前記複数の制御モデルは、訓練済み機械学習モデル及びルールベースモデルを含む、
請求項1に記載の制御装置。
【請求項3】
前記1つ以上の制御モデルを選択することは、前記訓練済み機械学習モデルを使用して前記移動体の自動制御を実施している間に前記ユーザによる介入が発生したことを示す記録が前記介入履歴に含まれている場合に、当該記録により示される条件下で、前記ルールベースモデルを選択することを含む、
請求項2に記載の制御装置。
【請求項4】
前記1つ以上の制御モデルを選択することは、
1つの制御モデルを選択すること、又は
2つ以上の制御モデルを選択すること、
により構成され、かつ
前記移動体の制御指令を導出することは、
前記1つの制御モデルから前記制御指令を得ること、又は
前記2つ以上の制御モデルそれぞれから得られた制御指令を統合することで、前記制御指令を導出すること、
により構成される、
請求項1に記載の制御装置。
【請求項5】
前記移動体は車両である、
請求項1から4のいずれか1項に記載の制御装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、制御装置に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
特許文献1には、訓練済みのニューラルネットワークを使用して、ルート、GPSデータ及びセンサデータから車両のコマンドを決定するように構成された自律的車両制御のためのシステムが提案されている。
【先行技術文献】
【特許文献】
【0003】
特表2019-533810号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
本開示の目的の一つは、ユーザによる介入頻度を低減可能な自動制御技術を提供することである。
【課題を解決するための手段】
【0005】
本開示の第1態様に係る制御装置は、複数の制御モデル及び選択モデルを記憶する記憶部、並びに制御部を備える。前記各制御モデルは、移動体の移動を自動制御するために、制御指令を導出するように構成される。前記制御部は、前記選択モデルにより、前記複数の制御モデルから1つ以上の制御モデルを選択すること、選択された前記1つ以上の制御モデルを使用して、前記移動体の制御指令を導出すること、ユーザによる介入の操作がない場合、導出された前記制御指令に従って、前記移動体の動作を制御すること、及び前記ユーザによる介入の操作がある場合、導出された前記制御指令を破棄又は導出された前記制御指令にオーバーラップして、前記ユーザによる介入の操作に従い、前記移動体の動作を制御すること、を実行するように構成される。そして、前記選択モデルは、前記ユーザの介入履歴から前記ユーザによる介入の発生を避けるよう前記1つ以上の制御モデルを選択するように構成される。なお、複数の制御モデル及び選択モデルの少なくともいずれかには、訓練済みの機械学習モデルが用いられてよい。機械学習モデルには、ニューラルネットワークが用いられてよい。
【発明の効果】
【0006】
本開示によれば、ユーザによる介入頻度の低減を期待することができる。
【図面の簡単な説明】
【0007】
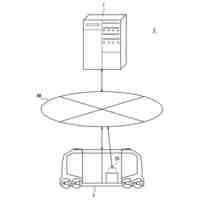
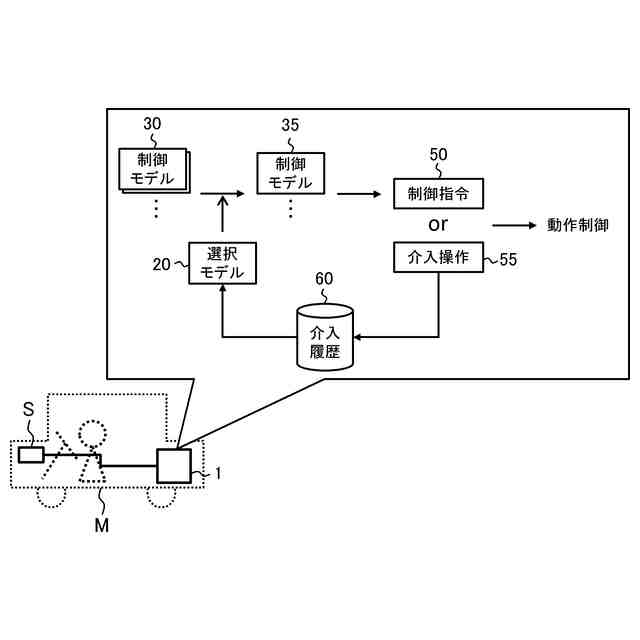
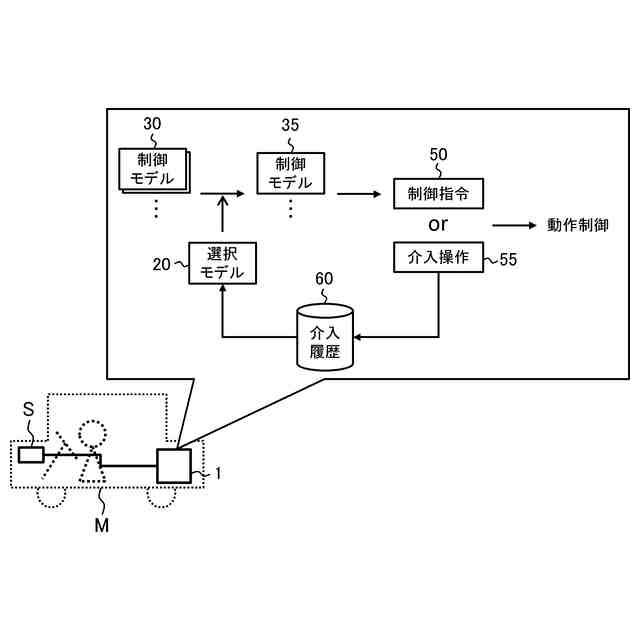
図1は、本開示が適用される場面の一例を模式的に示す。
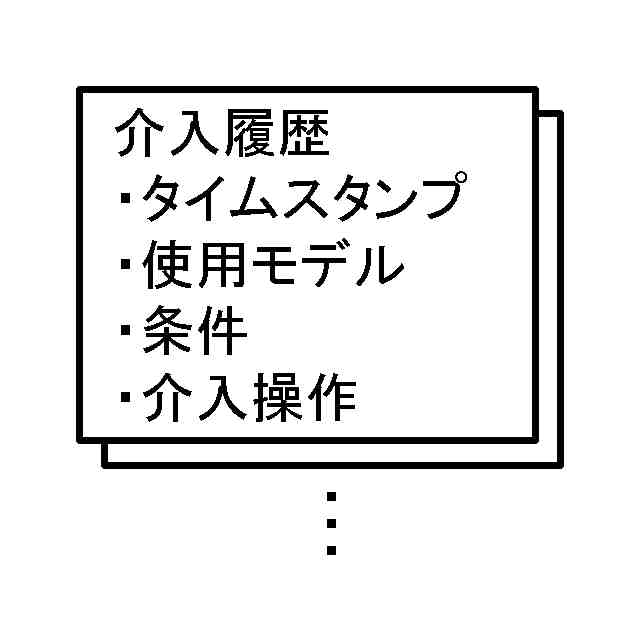
図2は、本開示の介入履歴のデータ構成の一例を模式的に示す。
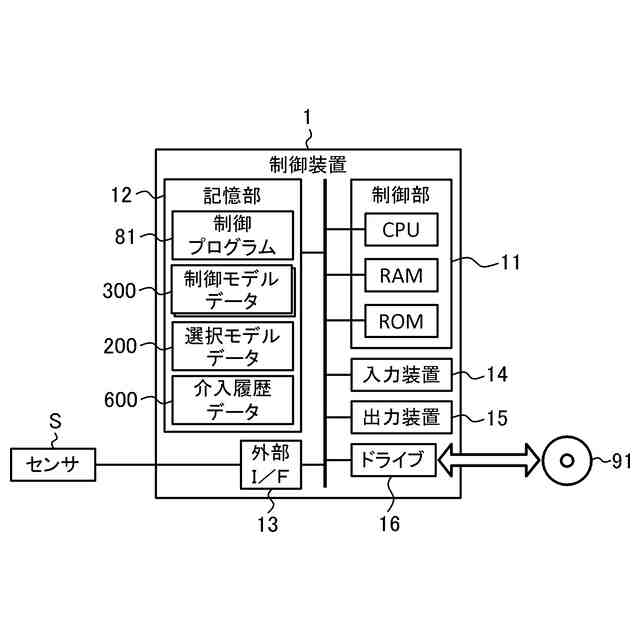
図3は、本開示の制御装置のハードウェア構成の一例を模式的に示す。
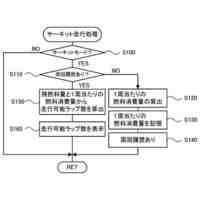
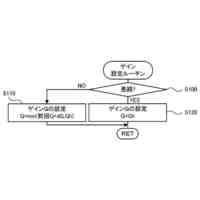
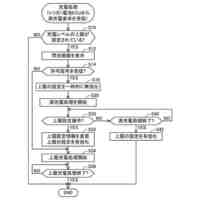
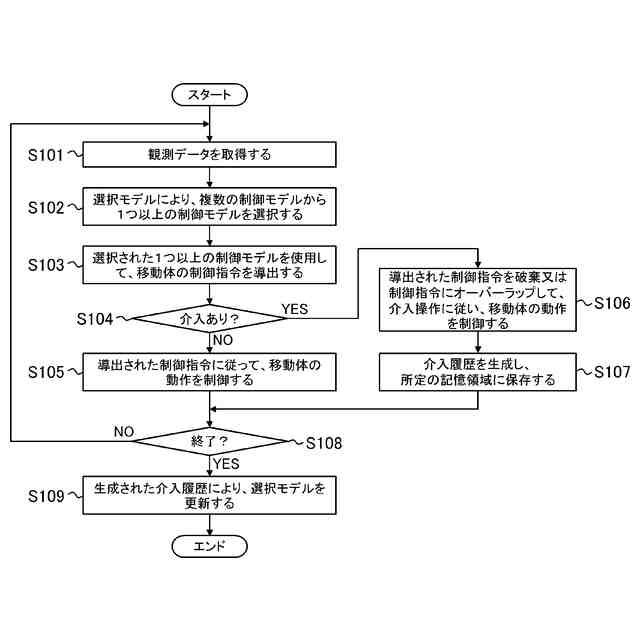
図4は、本開示の制御装置による制御に関する処理手順の一例を示す。
【発明を実施するための形態】
【0008】
従来、ルールベースによる自動運転システムが知られている。また、特許文献1等の方法によれば、訓練済み機械学習モデルを使用することで、自動運転システムを構築することができる。しかしながら、制御モデル(ルールベースモデル又は機械学習モデル)による自動運転の制御は必ずしもユーザに適合するとは限らない。制御モデルによる自動運転の制御がユーザに適合しない場合には、ユーザによる介入の操作が発生し、自動運転は実
施されずに、手動運転が実施されることになる。制御モデルによる自動運転がユーザに大きく適合しない場合には、自動運転システムは殆ど使用されず、ユーザによる介入操作が頻発してしまう恐れがある。なお、この問題点は、車両の種類を問わず生じ得る。また、このような問題点が生じるのは、車両を制御する場面に限られない。移動を制御する点では、車両以外の移動体でも同様である。そのため、車両以外のあらゆる移動体を制御する場面でも、同様の問題点が生じ得る。
【0009】
これに対して、本開示の第1態様に係る制御装置は、複数の制御モデル及び選択モデルを記憶する記憶部、並びに制御部を備える。各制御モデルは、移動体の移動を自動制御するために、制御指令を導出するように構成される。制御部は、選択モデルにより、複数の制御モデルから1つ以上の制御モデルを選択すること、選択された1つ以上の制御モデルを使用して、移動体の制御指令を導出すること、ユーザによる介入の操作がない場合、導出された制御指令に従って、移動体の動作を制御すること、及びユーザによる介入の操作がある場合、導出された制御指令を破棄又は導出された制御指令にオーバーラップして、ユーザによる介入の操作に従い、移動体の動作を制御すること、を実行するように構成される。選択モデルは、ユーザの介入履歴からユーザによる介入の発生を避けるよう1つ以上の制御モデルを選択するように構成される。
【0010】
本開示の第1態様では、選択モデルは、ユーザによる過去の介入操作の記録を示す介入履歴に基づいて、ユーザによる介入の発生を避けるよう制御モデルを選択するように構築される。単純な一例では、選択モデルは、過去に介入の生じた場面において、その場面で使用した制御モデルを新たな機会には使用せず、別の制御モデルを選択するように構築されてよい。このように、介入履歴から構築された選択モデルを用いて、自動制御に使用する制御モデルを調整することで、導出される制御指令をユーザに適合させることができる。これにより、本開示によれば、ユーザによる介入頻度の低減を期待することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
トヨタ自動車株式会社
車両
14日前
トヨタ自動車株式会社
車両
1日前
トヨタ自動車株式会社
車両
7日前
トヨタ自動車株式会社
車両
今日
トヨタ自動車株式会社
車両
1日前
トヨタ自動車株式会社
車両
今日
トヨタ自動車株式会社
電池
今日
トヨタ自動車株式会社
車両
8日前
トヨタ自動車株式会社
電池
今日
トヨタ自動車株式会社
車両
2日前
トヨタ自動車株式会社
車両
1日前
トヨタ自動車株式会社
方法
20日前
トヨタ自動車株式会社
電動車
8日前
トヨタ自動車株式会社
モータ
2日前
トヨタ自動車株式会社
サーバ
20日前
トヨタ自動車株式会社
リレー
7日前
トヨタ自動車株式会社
電動車
2日前
トヨタ自動車株式会社
電動車
7日前
トヨタ自動車株式会社
電動車
2日前
トヨタ自動車株式会社
八方弁
1日前
トヨタ自動車株式会社
電動車
今日
トヨタ自動車株式会社
自動車
7日前
トヨタ自動車株式会社
リレー
7日前
トヨタ自動車株式会社
リレー
7日前
トヨタ自動車株式会社
電動車
7日前
トヨタ自動車株式会社
蓄電セル
13日前
トヨタ自動車株式会社
蓄電セル
15日前
トヨタ自動車株式会社
蓄電セル
8日前
トヨタ自動車株式会社
蓄電セル
15日前
トヨタ自動車株式会社
駆動装置
1日前
トヨタ自動車株式会社
蓄電セル
15日前
トヨタ自動車株式会社
締結構造
1日前
トヨタ自動車株式会社
駆動装置
今日
トヨタ自動車株式会社
内燃機関
8日前
トヨタ自動車株式会社
制御装置
1日前
トヨタ自動車株式会社
蓄電セル
8日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ