TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024176892
公報種別
公開特許公報(A)
公開日
2024-12-19
出願番号
2023095751
出願日
2023-06-09
発明の名称
制御装置
出願人
トヨタ自動車株式会社
代理人
弁理士法人秀和特許事務所
主分類
B60W
40/00 20060101AFI20241212BHJP(車両一般)
要約
【課題】環境依存によるカメラの配置の変動に起因する悪影響を抑えるための制御技術を提供する。
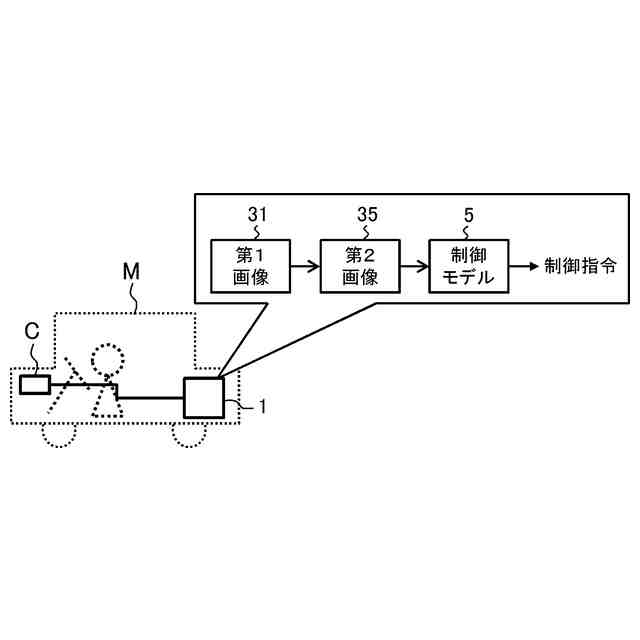
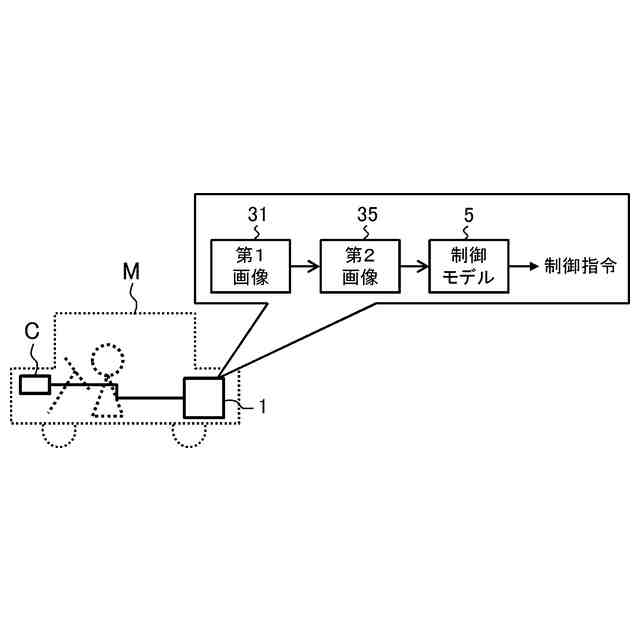
【解決手段】本開示の一側面に係る制御装置は、実カメラにより撮像された第1画像を取得し、統一的な仮想カメラで撮像された画像となるように、取得された第1画像を射影変換することにより第2画像を生成し、制御モデルを使用して、生成された第2画像から車両の制御指令を導出し、かつ導出された制御指令に従って、車両の走行を制御する。
【選択図】図1
特許請求の範囲
【請求項1】
制御モデルを記憶する記憶部、及び
制御部、
を備える制御装置であって、
前記制御部は、
車両に搭載された実カメラにより撮像された第1画像を取得すること、
統一的な仮想カメラで撮像された画像となるように、取得された前記第1画像を射影変換することにより第2画像を生成すること、
生成された前記第2画像を前記制御モデルに与えて、車両の制御指令を導出すること、及び
導出された前記制御指令に従って、車両の走行を制御すること、
を実行するように構成される、
制御装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、自動運転車両の制御技術に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
特許文献1には、訓練済みのニューラルネットワークを使用して、ルート、GPSデータ及びセンサデータから車両のコマンドを決定するように構成された自律的車両制御のためのシステムが提案されている。
【先行技術文献】
【特許文献】
【0003】
特表2019-533810号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
本開示の目的の一つは、環境依存によるカメラの配置の変動に起因する悪影響を抑えるための制御技術を提供することである。
【課題を解決するための手段】
【0005】
本開示の第1態様に係る制御装置は、制御モデルを記憶する記憶部及び制御部を備える。制御部は、車両に搭載された実カメラにより撮像された第1画像を取得すること、統一的な仮想カメラで撮像された画像となるように、取得された前記第1画像を射影変換することにより第2画像を生成すること、生成された前記第2画像を前記制御モデルに与えて、車両の制御指令を導出すること、及び導出された前記制御指令に従って、車両の走行を制御すること、を実行するように構成される。制御モデルは、訓練済みの機械学習モデルにより構成されてよい。機械学習モデルは、ニューラルネットワークで構成されてよい。
【発明の効果】
【0006】
本開示によれば、環境依存によるカメラの配置の変動に起因する悪影響を抑えることができる。
【図面の簡単な説明】
【0007】
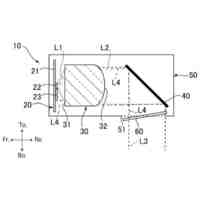
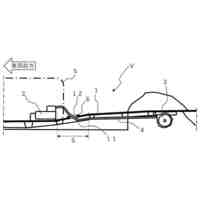
図1は、本開示が適用される場面の一例を模式的に示す。
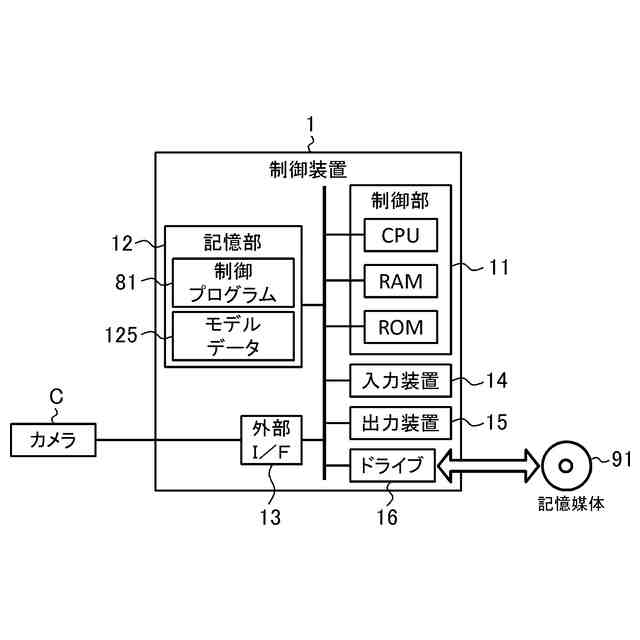
図2は、制御装置のハードウェア構成の一例を模式的に示す。
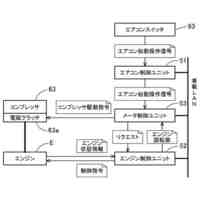
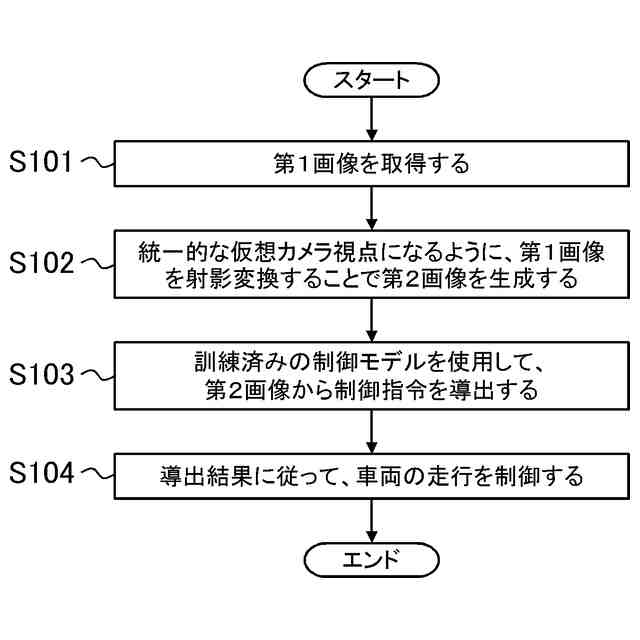
図3は、制御装置による車両制御に関する処理手順の一例を示す。
【発明を実施するための形態】
【0008】
[1 適用例]
図1は、本開示を適用した場面の一例を模式的に示す。本実施形態では、制御装置1は車両Mに搭載され、車両MはカメラCを備える。カメラCは、制御装置1に接続される。カメラCは、実カメラの一例である。本実施形態に係る制御装置1は、車両Mに搭載されたカメラC(実カメラ)により撮像された第1画像31を取得する。制御装置1は、統一的な仮想カメラで撮像された画像となるように、取得された第1画像31を射影変換することで、第2画像35を生成する。第1画像31は、オリジナル画像であり、第2画像35は、射影変換後の画像である。制御装置1は、生成された第2画像35を制御モデル5に与えて、車両Mの制御指令を導出する。そして、制御装置1は、導出された制御指令に従って、車両Mの走行を制御する。
【0009】
なお、上記態様に係る制御装置1の別の形態として、本開示の一側面は、以上の各構成要素の全部又はその一部を実現する情報処理方法であってもよいし、プログラムであってもよいし、このようなプログラムを記憶した、コンピュータ等の機械が読み取り可能な記憶媒体であってもよい。車両Mの種類は任意に選択されてよい。典型例として、車両Mは、レベル2以上の自動運転の能力を有した自動車であってよい。なお、制御装置1は、車両Mの走行を直接的に制御してもよいし、又は他のコンピュータを介して間接的に制御してもよい。また、制御装置1は、車両Mの内部に搭載されてもよいし(図1)、或いは車両Mの外部に配置されてもよい。
【0010】
(制御モデル)
カメラ(カメラC)の画像を含む車両(車両M)の環境から制御指令を導出可能であれば、制御モデル5の入出力形態は、特に限られなくてよく、実施の形態に応じて適宜選択されてよい。一例では、制御モデル5は、1以上の時点のセンサ(カメラCを含む)の観測データから制御指令を導出するように構成されてよい。他の一例では、制御モデル5は、周辺環境の認識結果から制御指令を導出するように構成されてよい。この場合、制御装置1は、カメラCを含むセンサの観測データから周辺環境の認識結果を推論する訓練済み解析モデルを更に備えてよい。或いは、制御モデル5は、訓練済み解析モデルを含んでよい。制御モデル5は、例えば、設定速度、制限速度、位置、地図情報、ナビ情報等のセンサデータ以外の任意の他の情報の入力を更に受け付けるように構成されてよい。制御モデル5は、例えば、車線変更、車線維持、緊急停車等のシーン毎に用意されてもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
空間形成装置
28日前
日本精機株式会社
照明装置
23日前
個人
常設収納型サンバイザー
1か月前
個人
回転窓ワイパー装置
28日前
株式会社豊田自動織機
産業車両
23日前
日本精機株式会社
車載表示装置
1か月前
日本精機株式会社
車載表示装置
29日前
日本精機株式会社
車載表示装置
1か月前
日本精機株式会社
車両用報知装置
1か月前
個人
音による速度計とプログラム
1か月前
日本化薬株式会社
ガス発生器
1日前
日本化薬株式会社
ガス発生器
21日前
極東開発工業株式会社
タンク車
1か月前
株式会社ヨコオ
車載装置
21日前
和光工業株式会社
昇降装置
1か月前
日本精機株式会社
鞍乗型車両用表示装置
20日前
大伸工業株式会社
車載フロアマット
20日前
豊田合成株式会社
ステアリング装置
7日前
株式会社SUBARU
車両用シート
7日前
株式会社SUBARU
車両用シート
7日前
株式会社SUBARU
車両用シート
7日前
株式会社アイシン
車両
7日前
株式会社東芝
電気車制御装置
23日前
株式会社ジェイテクト
車高調製装置
1か月前
株式会社クボタ
作業車
1か月前
林テレンプ株式会社
蓋付器具
1か月前
株式会社クボタ
作業車
13日前
日産自動車株式会社
電動車両
23日前
株式会社クボタ
作業車
1か月前
株式会社SUBARU
車体前部構造
1か月前
株式会社SUBARU
車体前部構造
1か月前
株式会社クボタ
作業車
29日前
株式会社クボタ
作業車
1か月前
株式会社SUBARU
車体前部構造
1か月前
ダイハツ工業株式会社
車両用制御装置
20日前
株式会社クボタ
作業車両
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ