TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025002669
公報種別
公開特許公報(A)
公開日
2025-01-09
出願番号
2023102988
出願日
2023-06-23
発明の名称
深層学習装置及び走行体
出願人
株式会社明電舎
代理人
園田・小林弁理士法人
主分類
G06T
7/11 20170101AFI20241226BHJP(計算;計数)
要約
【課題】走行体の進行方向の前方にある障害物の有無を安定的に検知することを可能とした深層学習装置及び走行体を提供する。
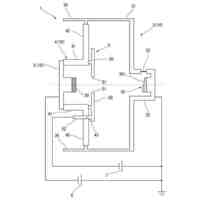
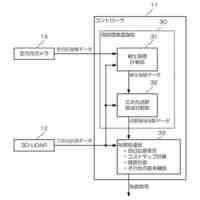
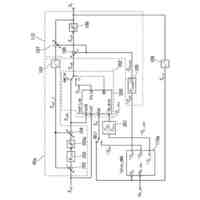
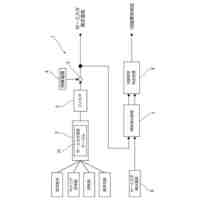
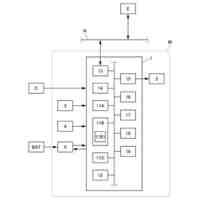
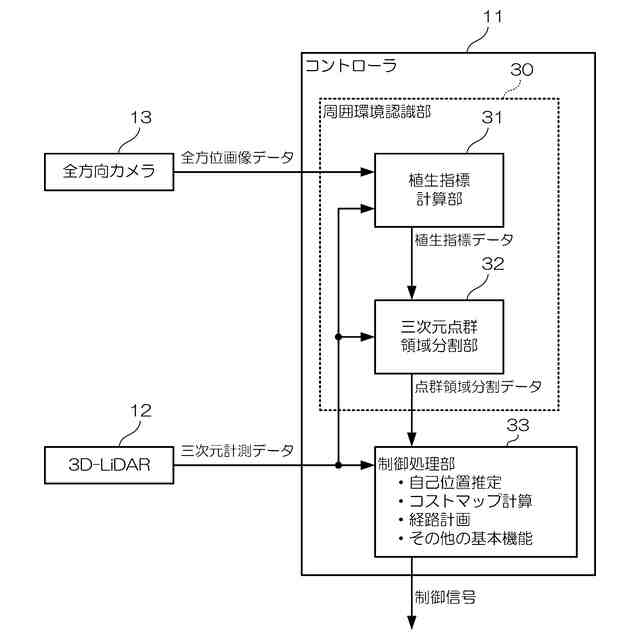
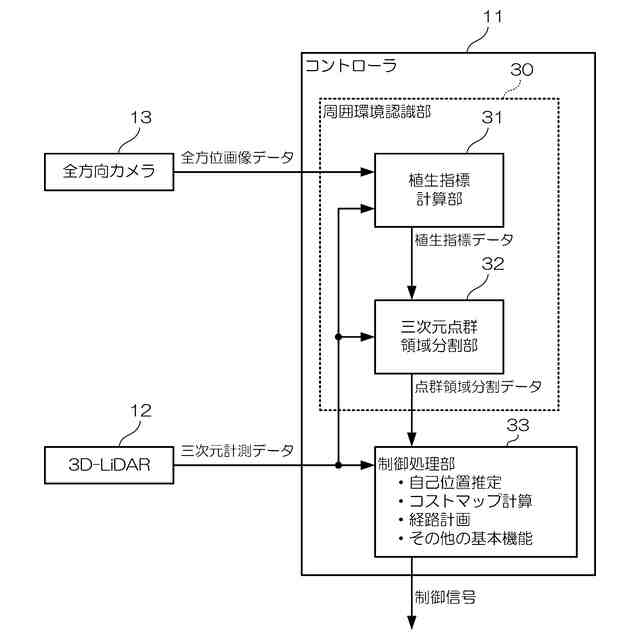
【解決手段】周囲環境認識部30において、植生指標計算部31は、全方位カメラ13からの全方位画像データと3D-LiDAR12からの三次元計測データとに基づいて植生指標データを計算する。三次元点群領域分割部32は、3D-LiDAR12からの三次元計測データと植生指標計算部31からの植生指標データとに基づいて、三次元点群の領域分割処理を行い、点群領域分割データを出力する。制御処理部33は、3D-LiDAR12からの三次元計測データと、周囲環境認識部30からの点群領域分割データとに基づいて、自己位置の推定、コストマップ計算、経路計画など処理し、移動ロボット1を走行制御するための制御信号を出力する。
【選択図】図3
特許請求の範囲
【請求項1】
走行体の周囲環境における三次元情報を含む三次元計測データと、前記周囲環境の全方位の画像を含む全方位画像データと、前記三次元計測データを基に作成された点群領域ラベルデータとを記憶する記憶部と、
前記三次元計測データと、前記全方位画像データとに基づいて、前記周囲環境における植生の状況を示す植生指標データを算出する植生指標計算部と、
前記三次元計測データと、前記植生指標データと、前記点群領域ラベルデータとを学習データセットとして用いて深層学習を行い、学習結果データを作成する三次元点群領域分割学習部と、
を備えることを特徴とする深層学習装置。
続きを表示(約 1,000 文字)
【請求項2】
前記記憶部は、前記三次元計測データと、前記全方位画像データと、前記点群領域ラベルデータに代えて前記全方位画像データに基づいて作成した画像領域ラベルデータとを記憶し、
前記三次元計測データと、前記画像領域ラベルデータとに基づいて、前記点群領域ラベルデータを作成する点群領域ラベル作成部をさらに備えることを特徴とする請求項1に記載の深層学習装置。
【請求項3】
周囲環境を認識して走行手段により走行する走行体であって、
前記周囲環境における三次元情報を含む三次元計測データを取得する三次元計測部と、
前記周囲環境を撮影した画像データを取得する撮像部と、
前記三次元計測データと、前記画像データとに基づいて、前記周囲環境における植生の状況を示す植生指標データを算出する植生指標計算部と、
前記三次元計測データと、前記植生指標データとに基づいて、点群領域分割データを生成する三次元点群領域分割部と、
前記三次元計測データと、前記点群領域分割データとに基づいて、前記周囲環境のコストマップを計算し、前記コストマップに基づいて前記走行手段による走行を制御する制御処理部と、
を備えることを特徴とする走行体。
【請求項4】
前記撮像部は、前記周囲環境の全方位を撮影する全方位カメラであり、
前記画像データは、前記全方位カメラによって撮影された全方位画像データである、
ことを特徴とする請求項3に記載の走行体。
【請求項5】
前記全方位カメラは、前記走行体の進行方向に対して前後双方に設置された魚眼カメラである、
ことを特徴とする請求項4に記載の走行体。
【請求項6】
前記撮像部は、前記走行体の進行方向に対して前方を撮影するカラーカメラであり、
前記画像データは、前記カラーカメラによって撮影されたカラー画像データである、
ことを特徴とする請求項3に記載の走行体。
【請求項7】
前記撮像部は、レンズ前面に赤色透過フィルタを備え、前記走行体の進行方向に対して前方を撮影するモノクロカメラであり、
前記画像データは、前記モノクロカメラによって撮影されたグレー画像データである、
ことを特徴とする請求項3に記載の走行体。
発明の詳細な説明
【技術分野】
【0001】
本発明は、深層学習装置及び走行体に関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
移動ロボット(走行体)は、3D-LiDAR(Three-Dimensional-Light Detection And Ranging)を搭載して周囲の全方位の三次元点群を計測し、その三次元点群の形状を予め計測しておいた三次元点群地図と比較して自己位置推定を行いながら走行する。移動ロボットの走行中に、進行方向の前方に障害物があれば、3D-LiDARで計測した情報を基に障害物検知を行い、障害物を回避する。
【0003】
例えば、3D-LiDARで計測した情報を基に障害物を検知する方法としてコストマップがある(非特許文献1を参照)。非特許文献1のように、計測した三次元点群の位置情報から占有格子地図を作り、二次元コストマップを生成する。これにより、走行路面よりも高い位置に物体がある箇所のコストが高くなり、コストの高い箇所を障害物として検知することができる。
【0004】
また、3D-LiDARで計測した三次元点群に対して領域分割を行い、各三次元点がどの領域に属するかを認識することで障害物を検知する方法がある(非特許文献2を参照)。三次元点群領域分割では、各点毎に、自動車・自転車・道路・駐車場・建物・植生・幹・地形などの領域に分類する。移動ロボット側では、道路・駐車場などの走行可能な領域以外の領域を障害物として検出する。また、障害物検出結果を非特許文献1のコストマップに反映することで、障害物として検出した領域をコストが高い箇所とすることも容易にできる。非特許文献2の方法は、深層学習により三次元点群領域分割を行う方法の一つで、2020年に発表されて以来、研究開発競争の激しい点群領域分割分野において上位の性能を保ち続けている。非特許文献2は、自動車の自動運転を対象としており、移動ロボットへの応用として相性の良い技術である。
【0005】
また、三次元点群に対する方法ではないが、移動ロボットの前方をカラーカメラで撮影した画像に対して領域分割を行い、障害物を検知する方法がある(非特許文献3を参照)。画像領域分割では、画像上の画素毎に、自動車・自転車・道路・駐車場・建物・植生・幹・地形などの領域に分類する。移動ロボット側では、道路・駐車場などの走行可能な領域以外の領域を障害物とし、障害物の三次元位置をカメラ座標から三次元空間へ変換して求め、障害物の位置を検出する。非特許文献3の方法は、深層学習により画像領域分割を行う方法の一つで、2017年に発表されて以降、この分野では代表的な方法である。非特許文献3では自動車の自動運転を対象としており、移動ロボットへの応用として相性の良い技術である。
【先行技術文献】
【非特許文献】
【0006】
原 祥尭: "ROSを用いた自律走行", 日本ロボット学会誌, vol. 35, no. 4, pp286-290, 2017,URL<https://www.jstage.jst.go.jp/article/jrsj/35/4/35_35_286/_pdf/-char/ja>
C.Tiago, et al., "SalsaNext: Fast, Uncertainty-aware Semantic Segmentation of LiDAR Point Cloudes for Autonomous Driving", arViv, 2020, URL<https://arxiv.org/pdf/2003.03653.pdf>
H.Zhao, et al., "Pyramid Scene Parsing Network", arViv, 2017,URL<https://arxiv.org/pdf/1612.01105.pdf>
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、非特許文献1の方法では、高さのある物体を障害物として検出することができるが、公園内にある歩道のように、歩道の周囲に芝生がある場合など、高低差が少ない芝生などの植生を障害物として検出することができないという問題がある。高低差の少ない芝生などの植生を障害物として検出できない場合、移動ロボットは、低い障害物を回避することができず、例えば、公園などを走行した際には、侵入が禁止されている芝生へ入ってしまうという問題がある。
【0008】
また、非特許文献2では、歩道と芝生を見分けることがある程度可能であるが、三次元点群だけでは領域分割に対する情報量が少なく、道路や駐車場の一部を植生と誤検知することがしばしば発生するという問題がある。
【0009】
また、非特許文献3の方法では、色情報を基に周囲環境を認識するため、非特許文献2の方法よりも領域分割の性能が高いが、明るさ変動の影響や、歩道が緑色や青色などの様々な色に着色されている場合は、別の物体として誤検知する場合があるという問題がある。
【0010】
また、非特許文献2又は非特許文献3では、前方に有りもしない障害物を誤検知した場合、移動ロボットは、障害物を回避しようとして、異常な回避行動をとったり、回避経路が見つからずに走行不能に陥ったりする可能性がある。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社明電舎
車両
10日前
株式会社明電舎
車両
13日前
株式会社明電舎
巻上機
1か月前
株式会社明電舎
電界放射装置
13日前
株式会社明電舎
電動機のロータ構造
7日前
株式会社明電舎
深層学習装置及び走行体
21日前
株式会社明電舎
水質判定装置および水質判定方法
10日前
株式会社明電舎
磁気軸受の制御装置および制御方法
6日前
株式会社明電舎
二重系制御システムのメモリ等価方式
13日前
株式会社明電舎
電子ビーム放出構造および電界放射装置
23日前
株式会社明電舎
電子ビーム放出構造および電界放射装置
6日前
株式会社明電舎
アキシャルギャップ型回転電機およびドローン
23日前
株式会社明電舎
モータ駆動装置およびモータ駆動装置の制御方法
6日前
株式会社明電舎
架線金具異常検出装置及び架線金具異常検出方法
21日前
株式会社明電舎
冷媒異常判定装置、電力変換装置及び冷媒異常判定方法
23日前
株式会社明電舎
水処理装置及び水処理方法
1か月前
株式会社明電舎
ケーブルグランドの取付構造および取付方法、電装製品、ケーブルグランドの固定治具およびロックナットの締付治具
1か月前
個人
情報提示方法
7日前
個人
プログラム
6日前
個人
自動精算システム
15日前
個人
RFタグ読取装置
24日前
個人
自動精算システム
1か月前
個人
売買システム
21日前
個人
救急搬送システム
1か月前
個人
管理サーバ
1か月前
個人
市場受発注システム
13日前
個人
発想支援方法及びシステム
10日前
キヤノン株式会社
印刷装置
1か月前
個人
分類処理プログラム及び方法
10日前
日本精機株式会社
車両用表示装置
23日前
日本精機株式会社
車両用表示装置
23日前
富士通株式会社
金融システム
7日前
個人
VRによる人体各部位の立体化
1か月前
個人
生成AIとの常時接続システム
1か月前
井関農機株式会社
ロボット作業車両
15日前
株式会社COLORS
表示装置
1か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ