TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024180051
公報種別
公開特許公報(A)
公開日
2024-12-26
出願番号
2023099475
出願日
2023-06-16
発明の名称
車両走行制御装置、車両走行制御システム、車両走行制御方法、及びプログラム
出願人
先進モビリティ株式会社
,
日本電気株式会社
,
中日本高速道路株式会社
代理人
個人
主分類
B60W
30/16 20200101AFI20241219BHJP(車両一般)
要約
【課題】梯団走行における車両の走行状態に応じた車間距離の計算を可能にする。
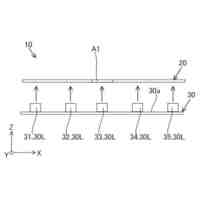
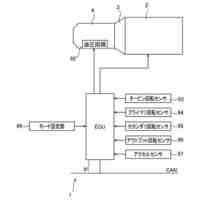
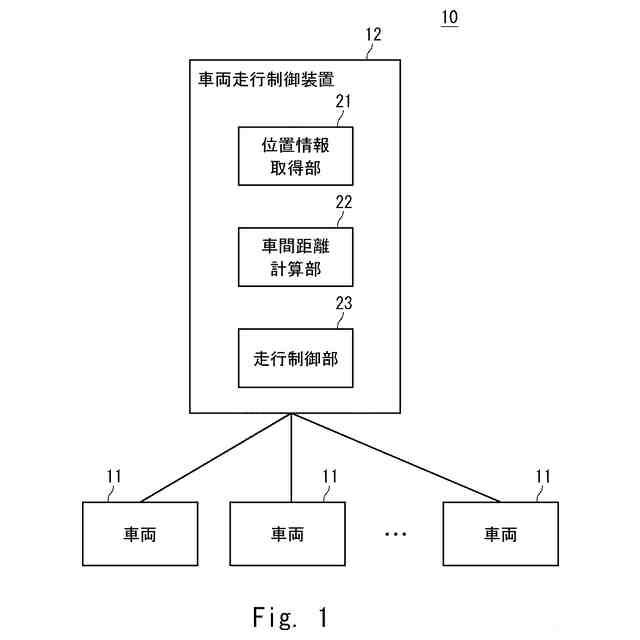
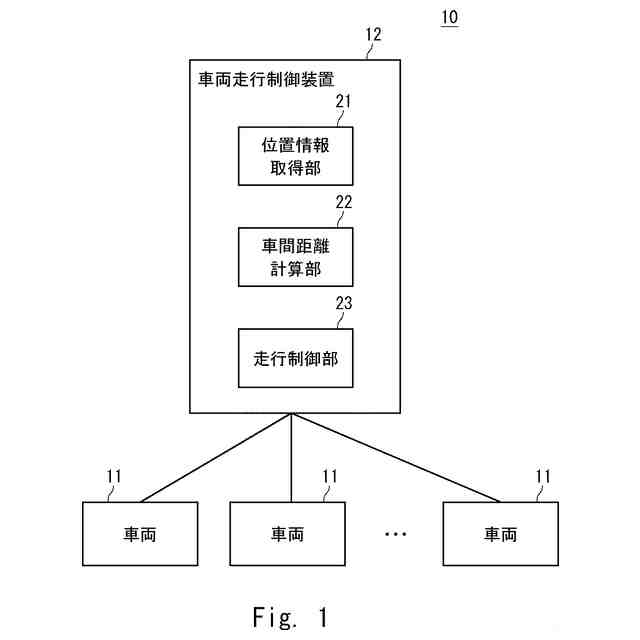
【解決手段】位置情報取得部21は、梯団走行する複数の車両11の位置情報を取得する。車間距離計算部22は、梯団走行における複数の車両11の走行状態、及び位置情報取得部21で取得された車両11の位置情報に基づいて、複数の車両11の間の車間距離を計算する。走行制御部23は、車間距離計算部22で計算された車間距離に基づいて、複数の車両11の走行を制御する。
【選択図】図1
特許請求の範囲
【請求項1】
梯団走行する複数の車両の位置情報を取得する位置情報取得部と、
前記梯団走行における前記複数の車両の走行状態、及び前記取得された車両の位置情報に基づいて、前記複数の車両の間の車間距離を計算する車間距離計算部と、
前記計算された車間距離に基づいて、前記複数の車両の走行を制御する走行制御部とを備える車両走行制御装置。
続きを表示(約 1,600 文字)
【請求項2】
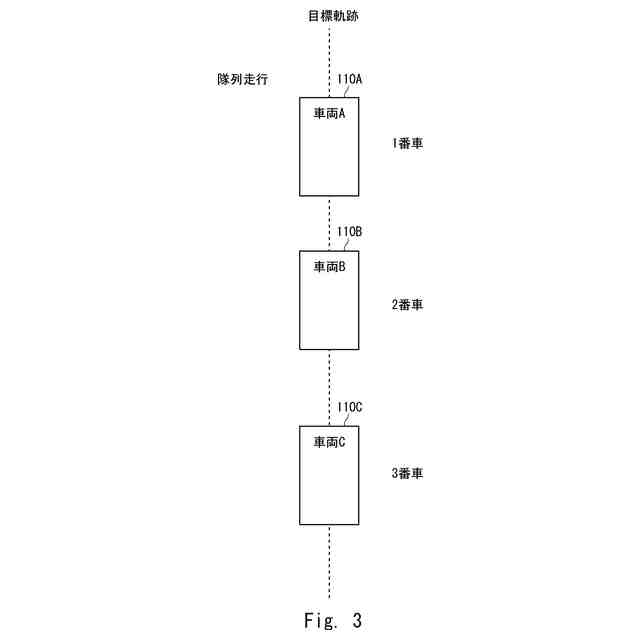
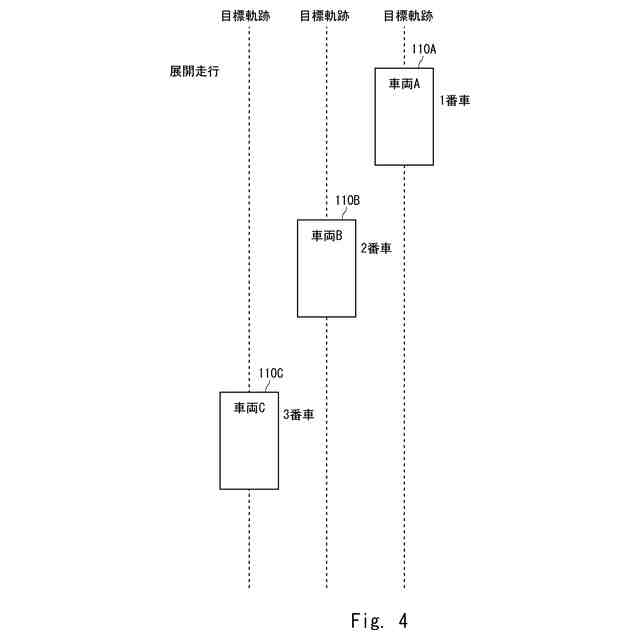
前記走行状態は、前記複数の車両が進行方向に沿って隊列走行する第1の走行状態、前記複数の車両が道幅方向に広がって展開走行する第2の走行状態、及び前記隊列走行から前記展開走行へ移行し、又は前記展開走行から前記隊列走行に移行する第3の走行状態を含む、請求項1に記載の車両走行制御装置。
【請求項3】
前記走行状態が前記第2の走行状態又は前記第3の走行状態の場合、前記車間距離計算部は、前記複数の車両のうちの隣接する車両間の直線距離を計算し、該計算した直線距離と、前記隣接する車両間の道幅方向のずれ量を示すオフセット量と、前記車両の長さとに基づいて、前記車間距離を計算する、請求項2に記載の車両走行制御装置。
【請求項4】
前記走行制御部は、前記第3の走行状態では、前記複数の車両のそれぞれに設定される展開時又は展開解除時の目標軌跡に従って、前記車両の道路における道幅方向の位置を制御し、
前記走行状態が前記第3の走行状態の場合、前記車間距離計算部は、前記展開時又は展開解除時の目標軌跡から前記オフセット量を取得する、請求項3に記載の車両走行制御装置。
【請求項5】
前記走行制御部は、前記第2の走行状態では、前記隣接する車両間の道幅方向のずれ量が所定のずれ量となるように前記車両の道路における道幅方向の位置を制御し、
前記走行状態が前記第2の走行状態の場合、前記車間距離計算部は、前記所定のずれ量を前記オフセット量として取得する、請求項3又は4に記載の車両走行制御装置。
【請求項6】
前記走行状態が前記第1の走行状態の場合、前記車間距離計算部は、前記複数の車両のうちの隣接する車両間の直線距離を計算し、該計算した直線距離と前記車両の長さとに基づいて、前記車間距離を計算する、請求項2又は3に記載の車両走行制御装置。
【請求項7】
前記車両走行制御装置は前記複数の車両のそれぞれに搭載され、各車両において、前記走行制御部は、前記車両走行制御装置が搭載される第1の車両の走行を制御し、
各車両において、前記車間距離計算部は、前記第1の車両の位置情報、及び当該第1の車両の1つ前を走行する第2の車両の位置情報と、前記走行状態とに基づいて、前記第1の車両と前記第2の車両との間の車間距離を計算する、請求項1又は2に記載の車両走行制御装置。
【請求項8】
梯団走行する複数の車両と、
前記複数の車両の走行を制御する車両走行制御装置とを備え、
前記車両走行制御装置は、
前記複数の車両の位置情報を取得する位置情報取得部と、
前記梯団走行における前記複数の車両の走行状態、及び前記取得された車両の位置情報に基づいて、前記複数の車両の間の車間距離を計算する車間距離計算部と、
前記計算された車間距離に基づいて、前記複数の車両の走行を制御する走行制御部とを有する、車両走行制御システム。
【請求項9】
梯団走行する複数の車両の位置情報を取得し、
前記梯団走行における前記複数の車両の走行状態、及び前記取得された車両の位置情報に基づいて、前記複数の車両の間の車間距離を計算し、
前記計算された車間距離に基づいて、前記複数の車両の走行を制御することを有する車両走行制御方法。
【請求項10】
梯団走行する複数の車両の位置情報を取得し、
前記梯団走行における前記複数の車両の走行状態、及び前記取得された車両の位置情報に基づいて、前記複数の車両の間の車間距離を計算し、
前記計算された車間距離に基づいて、前記複数の車両の走行を制御することを含む処理をプロセッサに実行させるためのプログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、車両走行制御装置、車両走行制御システム、車両走行制御方法、及びプログラムに関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
関連技術として、特許文献1は、車両距離測定装置を開示する。特許文献1において、車両の前後には送信用超音波センサ、及び受信用超音波センサが配置されている。送信用超音波センサは、時刻情報に同期して超音波バースト信号を送信する。受信用超音波センサは、他の車両から送信された超音波バースト信号を受信する。車両距離測定装置は、受信用超音波センサが受信した超音波バースト信号の到着時刻を、時刻情報に同期して検出し、送信時刻と受信時刻との時間差から、前方の車両又は後方の車両との相対距離を求める。特許文献1は、求めた相対距離が複数の車両の隊列走行に用いられることも開示する。
【0003】
別の関連技術として、特許文献2は、車両位置測定装置を開示する。特許文献2において、複数の車両は、それぞれ、撮像装置及び標識を有する。標識は、球状の光源を有する。撮像装置は、他の車両に取り付けられた標識を撮像する。車両位置測定装置は、各車両の標識に割り当てられている色と、撮像された標識の色とを比較し、比較結果に基づいて、他の車両を特定する。また、車両位置測定装置は、画像における標識の大きさから、車両から他の車両までの距離を求める。特許文献2は、標識の画像から複数の車両間の相互位置を測定し、測定した相互位置を用いて複数の車両を隊列走行させることも開示する。
【先行技術文献】
【特許文献】
【0004】
特開平7-128444号公報
特開2003-269914号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
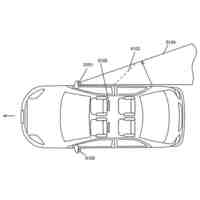
特許文献1及び2では、隊列走行において、後方を走行する車両は、その車両に搭載されたセンサを用いて、前方を走行する車両との間の距離を測定する。しかしながら、特許文献1及び2において、後方を走行する車両は、悪天候時などの視界が悪いときに、前方を走行する車両をセンサで捕捉できない場合があり得る。また、複数の車両が一団となって梯団走行する場合において、前方を走行する車両が、後方を走行する車両の斜め右前又は斜め左前を走行する場合がある。その場合、特許文献1及び2では、正しく車間距離を測定できない可能性がある。
【0006】
本開示は、上記事情に鑑み、梯団走行における車両の走行状態に応じて車間距離を計算することができる車両走行制御装置、車両走行制御システム、車両走行制御方法、及びプログラムを提供することを目的の一つとする。
【課題を解決するための手段】
【0007】
上記目的を達成するために、本開示は、第1の態様として、車両走行制御装置を提供する。車両走行制御装置は、梯団走行する複数の車両の位置情報を取得する位置情報取得部と、前記梯団走行における前記複数の車両の走行状態、及び前記取得された車両の位置情報に基づいて、前記複数の車両の間の車間距離を計算する車間距離計算部と、前記計算された車間距離に基づいて、前記複数の車両の走行を制御する走行制御部とを含む。
【0008】
本開示は、第2の態様として、車両走行制御システムを提供する。車両走行制御システムは、梯団走行する複数の車両と、前記複数の車両の走行を制御する車両走行制御装置とを含む。車両走行制御装置は、前記複数の車両の位置情報を取得する位置情報取得部と、前記梯団走行における前記複数の車両の走行状態、及び前記取得された車両の位置情報に基づいて、前記複数の車両の間の車間距離を計算する車間距離計算部と、前記計算された車間距離に基づいて、前記複数の車両の走行を制御する走行制御部とを含む。
【0009】
本開示は、第3の態様として、車両走行制御方法を提供する。車両走行制御方法は、梯団走行する複数の車両の位置情報を取得し、前記梯団走行における前記複数の車両の走行状態、及び前記取得された車両の位置情報に基づいて、前記複数の車両の間の車間距離を計算し、前記計算された車間距離に基づいて、前記複数の車両の走行を制御することを含む。
【0010】
本開示は、第4の態様として、プログラムを提供する。プログラムは、梯団走行する複数の車両の位置情報を取得し、前記梯団走行における前記複数の車両の走行状態、及び前記取得された車両の位置情報に基づいて、前記複数の車両の間の車間距離を計算し、前記計算された車間距離に基づいて、前記複数の車両の走行を制御することを含む処理をプロセッサに実行させるためのものである。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
車両
1か月前
個人
自動車運転補助装置
1か月前
井関農機株式会社
作業車両
15日前
日本精機株式会社
表示装置
1日前
個人
空気圧調節式ホイール。
2か月前
個人
キャンピングトレーラー
10日前
個人
謝意シグナル装着車
3日前
日本精機株式会社
車外表示装置
2か月前
東レ株式会社
車両用エアバッグ
3か月前
エムケー精工株式会社
洗車装置
2か月前
個人
自動車外部装着用しめ飾り
1か月前
日本精機株式会社
運転支援装置
3か月前
日本精機株式会社
車載表示装置
1か月前
日本精機株式会社
車載表示装置
3日前
日本精機株式会社
表示システム
3か月前
日本精機株式会社
車両用表示装置
1か月前
日本精機株式会社
車両用表示装置
1か月前
日本精機株式会社
車両用表示装置
2日前
日本精機株式会社
車両用表示装置
1か月前
日本精機株式会社
車両用表示装置
1か月前
トヨタ自動車株式会社
車両
29日前
日本精機株式会社
車両用表示装置
1か月前
株式会社SUBARU
車両
2か月前
日本精機株式会社
車両用表示装置
22日前
ダイハツ工業株式会社
車両
2か月前
日本精機株式会社
車両用表示装置
1か月前
ダイハツ工業株式会社
車両
2か月前
日本化薬株式会社
ガス発生器
2か月前
豊田合成株式会社
車両
3か月前
豊田合成株式会社
車両
3か月前
ダイハツ工業株式会社
バッグ
1か月前
株式会社コーワ
フィルター清掃装置
2か月前
東レ株式会社
車両用部材の補強方法
15日前
エムケー精工株式会社
車両処理装置
2か月前
YKS特許評価株式会社
自動車
1か月前
トヨタ自動車株式会社
搬送装置
1か月前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ