TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024179965
公報種別
公開特許公報(A)
公開日
2024-12-26
出願番号
2023099317
出願日
2023-06-16
発明の名称
車両の制御装置、車両の制御方法、及び車両の制御プログラム
出願人
トヨタ自動車株式会社
,
株式会社J-QuAD DYNAMICS
,
株式会社アドヴィックス
代理人
個人
,
個人
主分類
B60W
30/188 20120101AFI20241219BHJP(車両一般)
要約
【課題】惰行走行条件が満たされている場合に、惰行走行に適した状態を実現する。
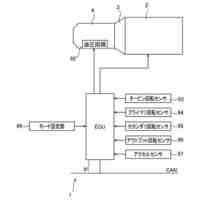
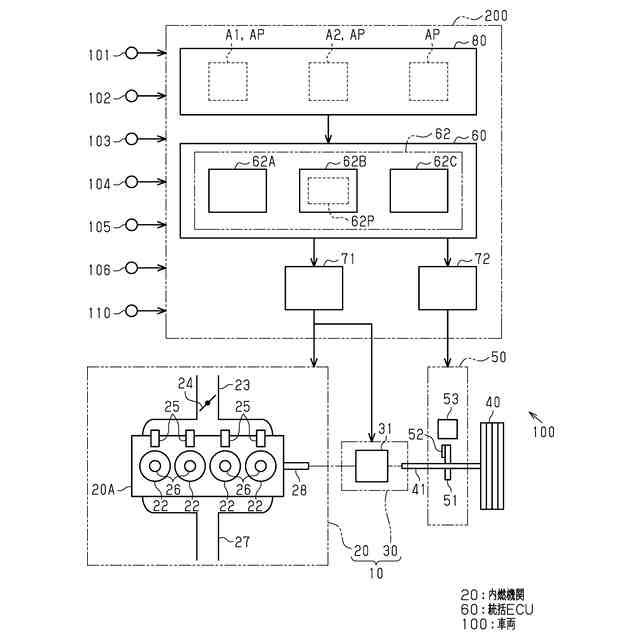
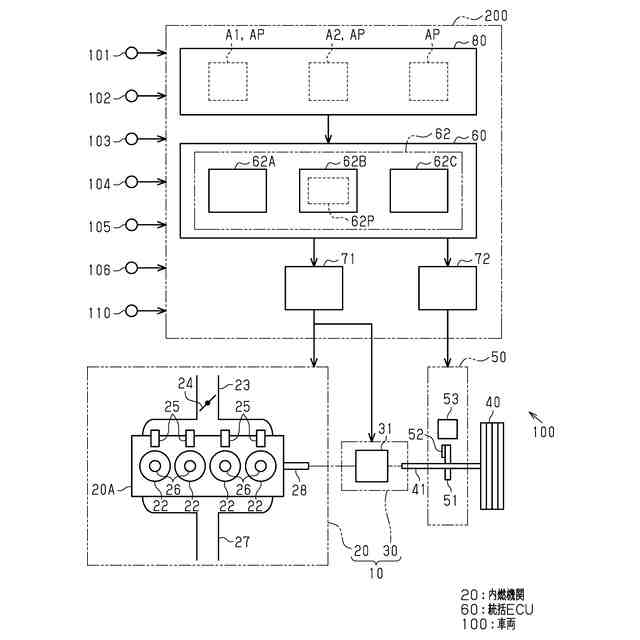
【解決手段】統括ECU60は、アプリケーションからの車両100の要求加速度及び車両100の実際の加速度の差に基づいて内燃機関20の駆動力を制御することを通じて、車両100の加速度のフィードバック制御を行うことと、内燃機関20をフューエルカット状態に制御したと仮定したときの車両100の予測加速度である第1予測加速度を算出することと、惰行走行条件が満たされており、且つ第1予測加速度が負の値である惰行下限値以上である場合に、加速度のフィードバック制御を行わずに、内燃機関20をフューエルカット状態に制御することと、を行う。
【選択図】図1
特許請求の範囲
【請求項1】
アプリケーションからの車両の要求加速度及び前記車両の実際の加速度の差に基づいて前記車両に搭載されている内燃機関の駆動力を制御することを通じて、前記車両の加速度のフィードバック制御を行うことと、
前記内燃機関をフューエルカット状態に制御したと仮定したときの前記車両の予測加速度である第1予測加速度を算出することと、
予め定められた惰行走行条件が満たされており、且つ前記第1予測加速度が予め定められた負の値である下限値以上である場合に、前記フィードバック制御を行わずに、前記内燃機関をフューエルカット状態に制御することと、
を行う
車両の制御装置。
続きを表示(約 2,500 文字)
【請求項2】
前記内燃機関をアイドル状態に制御したと仮定したときの前記車両の予測加速度である第2予測加速度を算出することと、
前記惰行走行条件が満たされており、且つ前記第2予測加速度が前記下限値以上であるとともに前記第2予測加速度が前記下限値より大きい負の値として予め定められた上限値以下であり、且つ前記第1予測加速度が前記下限値未満である場合に、前記フィードバック制御を行わずに、前記内燃機関をアイドル状態に制御することと、
を行う
請求項1に記載の車両の制御装置。
【請求項3】
前記惰行走行条件が満たされており、且つ前記第1予測加速度及び前記第2予測加速度の双方が前記下限値以上且つ前記上限値以下である場合、前記フィードバック制御を行わずに、前記内燃機関をフューエルカット状態に制御する
請求項2に記載の車両の制御装置。
【請求項4】
前記惰行走行条件が満たされており、且つ前記第1予測加速度及び前記第2予測加速度の双方が前記上限値よりも大きい場合、
前記アプリケーションからの前記要求加速度に代えて、前記下限値以上且つ前記上限値以下の値を新たな要求加速度である設定加速度として算出することと、
前記設定加速度及び前記車両の実際の加速度の差に基づいて前記駆動力に加えて前記車両に搭載されているブレーキ装置の制動力を制御することを通じて、前記フィードバック制御を行うことと、
を行う
請求項2又は3に記載の車両の制御装置。
【請求項5】
アプリケーションからの車両の要求加速度及び前記車両の実際の加速度の差に基づいて前記車両に搭載されている内燃機関の駆動力を制御することを通じて、前記車両の加速度のフィードバック制御を行うことと、
前記内燃機関をアイドル状態に制御したと仮定したときの前記車両の予測加速度である第2予測加速度を算出することと、
予め定められた惰行走行条件が満たされており、且つ前記第2予測加速度が予め定められた負の値である下限値以上であるとともに前記第2予測加速度が前記下限値より大きい負の値として予め定められた上限値以下の場合に、前記フィードバック制御を行わずに、前記内燃機関をアイドル状態に制御することと、
を行う
車両の制御装置。
【請求項6】
コンピュータによる車両の制御方法であって、
前記車両に搭載されている前記コンピュータが、
アプリケーションからの前記車両の要求加速度及び前記車両の実際の加速度の差に基づいて前記車両に搭載されている内燃機関の駆動力を制御することを通じて、前記車両の加速度のフィードバック制御を行うことと、
前記内燃機関をフューエルカット状態に制御したと仮定したときの前記車両の予測加速度である第1予測加速度を算出することと、
予め定められた惰行走行条件が満たされており、且つ前記第1予測加速度が予め定められた負の値である下限値以上である場合に、前記フィードバック制御を行わずに、前記内燃機関をフューエルカット状態に制御することと、
を行う
車両の制御方法。
【請求項7】
コンピュータによる車両の制御方法であって、
前記車両に搭載されている前記コンピュータが、
アプリケーションからの前記車両の要求加速度及び前記車両の実際の加速度の差に基づいて前記車両に搭載されている内燃機関の駆動力を制御することを通じて、前記車両の加速度のフィードバック制御を行うことと、
前記内燃機関をアイドル状態に制御したと仮定したときの前記車両の予測加速度である第2予測加速度を算出することと、
予め定められた惰行走行条件が満たされており、且つ前記第2予測加速度が予め定められた負の値である下限値以上であるとともに前記第2予測加速度が前記下限値より大きい負の値として予め定められた上限値以下の場合に、前記フィードバック制御を行わずに、前記内燃機関をアイドル状態に制御することと、
を行う
車両の制御方法。
【請求項8】
車両に搭載されているコンピュータを対象としたプログラムであって、
前記コンピュータに、
アプリケーションからの前記車両の要求加速度及び前記車両の実際の加速度の差に基づいて前記車両に搭載されている内燃機関の駆動力を制御することを通じて、前記車両の加速度のフィードバック制御を行うことと、
前記内燃機関をフューエルカット状態に制御したと仮定したときの前記車両の予測加速度である第1予測加速度を算出することと、
予め定められた惰行走行条件が満たされており、且つ前記第1予測加速度が予め定められた負の値である下限値以上である場合に、前記フィードバック制御を行わずに、前記内燃機関をフューエルカット状態に制御することと、
を実行させる
車両の制御プログラム。
【請求項9】
車両に搭載されているコンピュータを対象としたプログラムであって、
前記コンピュータに、
アプリケーションからの前記車両の要求加速度及び前記車両の実際の加速度の差に基づいて前記車両に搭載されている内燃機関の駆動力を制御することを通じて、前記車両の加速度のフィードバック制御を行うことと、
前記内燃機関をアイドル状態に制御したと仮定したときの前記車両の予測加速度である第2予測加速度を算出することと、
予め定められた惰行走行条件が満たされており、且つ前記第2予測加速度が予め定められた負の値である下限値以上であるとともに前記第2予測加速度が前記下限値より大きい負の値として予め定められた上限値以下の場合に、前記フィードバック制御を行わずに、前記内燃機関をアイドル状態に制御することと、
を実行させる
車両の制御プログラム。
発明の詳細な説明
【技術分野】
【0001】
この発明は、車両の制御装置、車両の制御方法、及び車両の制御プログラムに関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
特許文献1に開示されている車両は、内燃機関と、制御装置と、を備えている。制御装置は、車両の走行中、アクセルペダルとブレーキペダルとの双方が操作されない状態になると、車両を惰行走行させる。このとき、制御装置は、内燃機関に対して僅かに負の駆動力、すなわち僅かな制動力を発生させる。したがって、惰行走行中の車両は、徐々に減速する。
【先行技術文献】
【特許文献】
【0003】
特開2020-180602号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
車両を惰行走行させる特許文献1のような技術において、車両の加速度をフィードバック制御することがある。この場合、車両に対する要求加速度と、車両の実際の加速度との差を解消できるように内燃機関の駆動力が調整される。このとき、要求加速度に対する実際の加速度の差の増減に応じて、内燃機関に要求される駆動力が上下し得る。
【0005】
ところで、内燃機関の運転状態として、当該内燃機関が安定して運転を継続可能な最小限の燃焼状態であるアイドル状態と、気筒への燃料噴射を停止したフューエルカット状態と、がある。アイドル状態では、内燃機関の駆動力は正の値である。一方、フューエルカット状態では、機械的な損失があるため内燃機関の駆動力は負の値である。そして、内燃機関は、アイドル状態の駆動力とフューエルカット状態の駆動力との間の駆動力を出すことができない。
【0006】
例えば、上述した惰行走行の際に、アイドル状態の駆動力とフューエルカット状態の駆動力との間の駆動力が内燃機関に要求されたとする。この状態でフィードバック制御を行うと、内燃機関がアイドル状態からフューエルカット状態への切り替え、及びその逆の切り替えを繰り返し行うことになりかねない。内燃機関がアイドル状態とフューエルカット状態との切り替えを繰り返すと、内燃機関の駆動力ひいては車両の加速度が急変を繰り返す。この結果、乗員の乗り心地が悪化する。
【課題を解決するための手段】
【0007】
上記課題を解決するための車両の制御装置は、アプリケーションからの車両の要求加速度及び前記車両の実際の加速度の差に基づいて前記車両に搭載されている内燃機関の駆動力を制御することを通じて、前記車両の加速度のフィードバック制御を行うことと、前記内燃機関をフューエルカット状態に制御したと仮定したときの前記車両の予測加速度である第1予測加速度を算出することと、予め定められた惰行走行条件が満たされており、且つ前記第1予測加速度が予め定められた負の値である下限値以上である場合に、前記フィードバック制御を行わずに、前記内燃機関をフューエルカット状態に制御することと、を行う。
【0008】
上記課題を解決するための車両の制御装置は、アプリケーションからの車両の要求加速度及び前記車両の実際の加速度の差に基づいて前記車両に搭載されている内燃機関の駆動力を制御することを通じて、前記車両の加速度のフィードバック制御を行うことと、前記内燃機関をアイドル状態に制御したと仮定したときの前記車両の予測加速度である第2予測加速度を算出することと、予め定められた惰行走行条件が満たされており、且つ前記第2予測加速度が予め定められた負の値である下限値以上であるとともに前記第2予測加速度が前記下限値より大きい負の値として予め定められた上限値以下の場合に、前記フィードバック制御を行わずに、前記内燃機関をアイドル状態に制御することと、を行う。
【0009】
上記課題を解決するための車両の制御方法は、コンピュータによる車両の制御方法であって、前記車両に搭載されている前記コンピュータが、アプリケーションからの前記車両の要求加速度及び前記車両の実際の加速度の差に基づいて前記車両に搭載されている内燃機関の駆動力を制御することを通じて、前記車両の加速度のフィードバック制御を行うことと、前記内燃機関をフューエルカット状態に制御したと仮定したときの前記車両の予測加速度である第1予測加速度を算出することと、予め定められた惰行走行条件が満たされており、且つ前記第1予測加速度が予め定められた負の値である下限値以上である場合に、前記フィードバック制御を行わずに、前記内燃機関をフューエルカット状態に制御することと、を行う。
【0010】
上記課題を解決するための車両の制御方法は、コンピュータによる車両の制御方法であって、前記車両に搭載されている前記コンピュータが、アプリケーションからの前記車両の要求加速度及び前記車両の実際の加速度の差に基づいて前記車両に搭載されている内燃機関の駆動力を制御することを通じて、前記車両の加速度のフィードバック制御を行うことと、前記内燃機関をアイドル状態に制御したと仮定したときの前記車両の予測加速度である第2予測加速度を算出することと、予め定められた惰行走行条件が満たされており、且つ前記第2予測加速度が予め定められた負の値である下限値以上であるとともに前記第2予測加速度が前記下限値より大きい負の値として予め定められた上限値以下の場合に、前記フィードバック制御を行わずに、前記内燃機関をアイドル状態に制御することと、を行う。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
車両
1か月前
個人
自動車運転補助装置
1か月前
日本精機株式会社
表示装置
3日前
井関農機株式会社
作業車両
17日前
個人
キャンピングトレーラー
12日前
個人
空気圧調節式ホイール。
2か月前
東レ株式会社
車両用エアバッグ
3か月前
日本精機株式会社
車載表示装置
5日前
日本精機株式会社
運転支援装置
3か月前
日本精機株式会社
車外表示装置
2か月前
日本精機株式会社
表示システム
3か月前
エムケー精工株式会社
洗車装置
2か月前
個人
謝意シグナル装着車
5日前
個人
自動車外部装着用しめ飾り
1か月前
日本精機株式会社
車載表示装置
1か月前
日本精機株式会社
車両用表示装置
1か月前
日本精機株式会社
車両用表示装置
4日前
日本精機株式会社
車両用表示装置
2か月前
日本精機株式会社
車両用表示装置
1か月前
トヨタ自動車株式会社
車両
1か月前
ダイハツ工業株式会社
車両
2か月前
日本精機株式会社
車両用表示装置
24日前
日本精機株式会社
車両用表示装置
1か月前
株式会社SUBARU
車両
2か月前
日本精機株式会社
車両用表示装置
1か月前
日本精機株式会社
車両用表示装置
1か月前
ダイハツ工業株式会社
車両
2か月前
日本化薬株式会社
ガス発生器
2か月前
豊田合成株式会社
車両
3か月前
ダイハツ工業株式会社
バッグ
1か月前
株式会社コーワ
フィルター清掃装置
2か月前
エムケー精工株式会社
車両処理装置
3か月前
豊田合成株式会社
車両
3か月前
スズキ株式会社
車両制御装置
4か月前
東レ株式会社
車両用部材の補強方法
17日前
ダイハツ工業株式会社
車両構造
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ