TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024179758
公報種別
公開特許公報(A)
公開日
2024-12-26
出願番号
2023098880
出願日
2023-06-16
発明の名称
衝突防止制御システム及び方法
出願人
THK株式会社
代理人
個人
,
個人
主分類
H02P
25/064 20160101AFI20241219BHJP(電力の発電,変換,配電)
要約
【課題】集中コントローラの計算負荷を低減できる衝突防止制御システムを提供する。
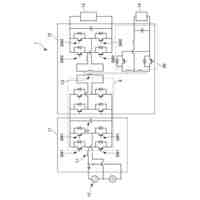
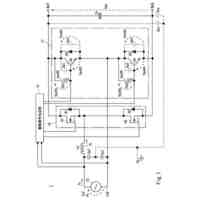
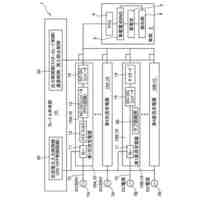
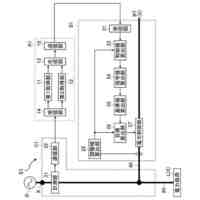
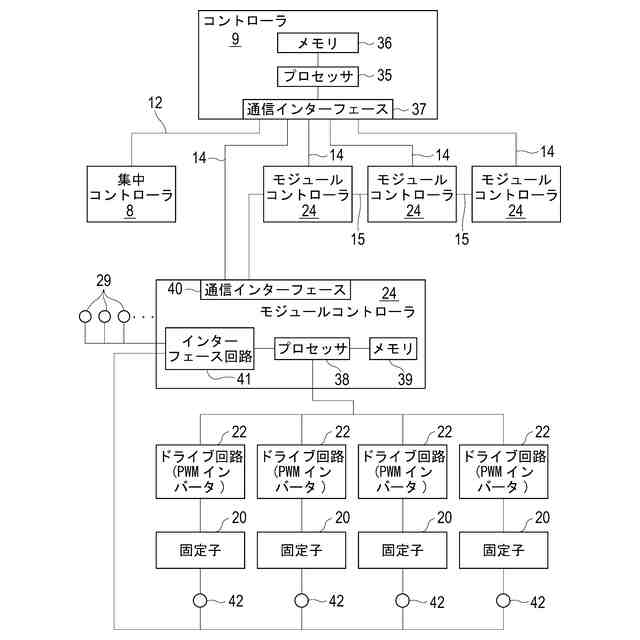
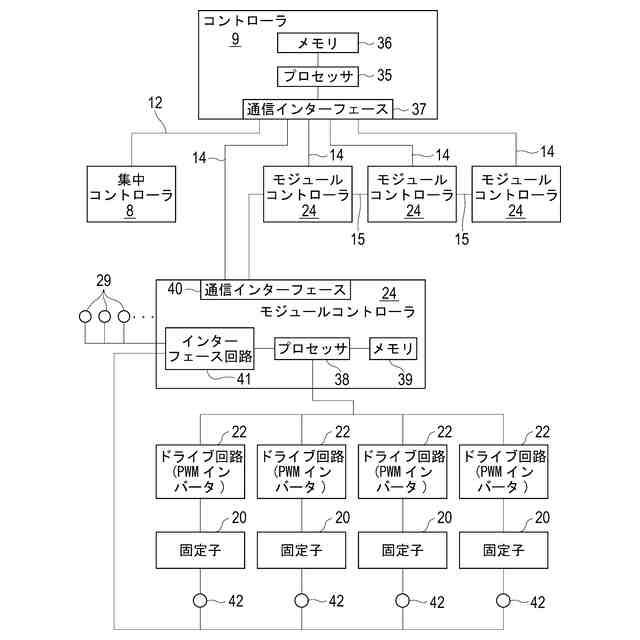
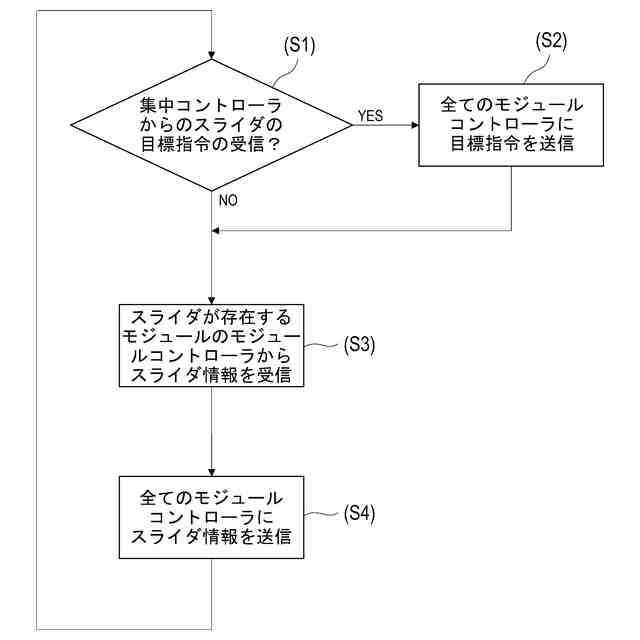
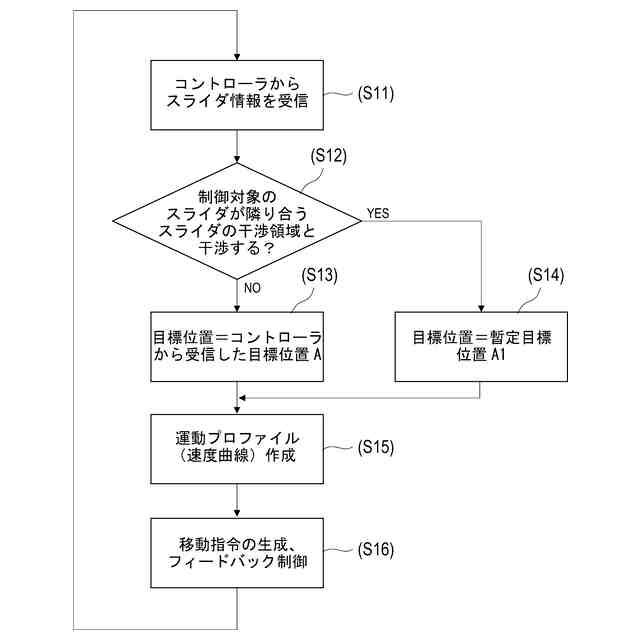
【解決手段】衝突防止制御システムは、コントローラ9と、複数のモジュールのドライブ回路22を制御する複数のモジュールコントローラ24と、を備える。スライダが存在するモジュールのモジュールコントローラ24がスライダの少なくとも識別IDと現在位置を含むスライダ情報をコントローラ9に送信する。コントローラ9がスライダ情報を複数のモジュールコントローラ24に送信する。制御対象のスライダが存在するモジュールのモジュールコントローラ24が、隣接するスライダとの衝突を防止するように制御対象のスライダを制御する。
【選択図】図6
特許請求の範囲
【請求項1】
複数のモジュールを有する搬送経路を複数のスライダが移動する搬送装置に用いられる衝突防止制御システムであって、
コントローラと、
複数のモジュールのドライブ回路を制御する複数のモジュールコントローラと、を備え、
前記スライダが存在するモジュールのモジュールコントローラが前記スライダの少なくとも識別IDと現在位置を含むスライダ情報を前記コントローラに送信し、
前記コントローラが前記スライダ情報を前記複数のモジュールコントローラに送信し、
制御対象のスライダが存在するモジュールのモジュールコントローラが、隣接するスライダとの衝突を防止するように制御対象のスライダを制御する衝突防止制御システム。
続きを表示(約 970 文字)
【請求項2】
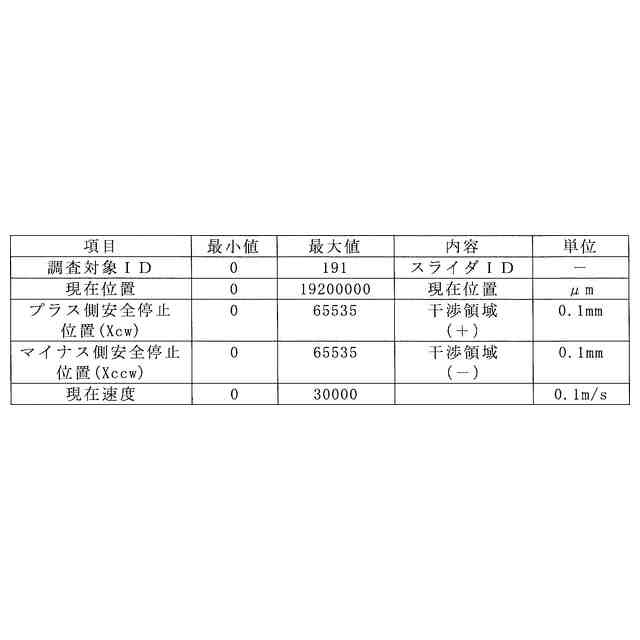
前記スライダ情報は、前記スライダの識別ID、現在位置及び干渉領域を含むことを特徴とする請求項1に記載の衝突防止制御システム。
【請求項3】
前記モジュールコントローラは、目標位置まで移動したと仮定した制御対象のスライダが隣り合うスライダの干渉領域と干渉するとき、干渉を回避するように制御対象のスライダの目標位置を暫定目標位置に変化させることを特徴とする請求項2に記載の衝突防止制御システム。
【請求項4】
前記モジュールコントローラは、制御対象のスライダと隣接するスライダが互いに向かい合う方向に移動するとき、これらが同一方向に移動するときの減速度よりも大きい緊急停止減速度で制御対象のスライダを減速停止させることを特徴とする請求項1又は2に記載の衝突防止制御システム。
【請求項5】
前記干渉領域は、前記スライダが減速して停止するまでの減速停止距離を含むことを特徴とする請求項2又は3に記載の衝突防止制御システム。
【請求項6】
前記干渉領域は、前記コントローラの位置更新周期の間に前記スライダが移動するスキャンタイム移動距離を含むことを特徴とする請求項5に記載の衝突防止制御システム。
【請求項7】
前記コントローラが、集中コントローラから受信したスライダの目標位置指令を前記モジュールコントローラに送信することを特徴とする請求項1又は2に記載の衝突防止制御システム。
【請求項8】
複数のモジュールを有する搬送経路を複数のスライダが移動する搬送装置に用いられる衝突防止制御方法であって、
前記搬送装置が、コントローラと、複数のモジュールのドライブ回路を制御する複数のモジュールコントローラと、を備え、
前記スライダが存在するモジュールのモジュールコントローラが前記スライダの少なくとも識別情報と位置情報を含むスライダ情報を前記コントローラに送信し、
前記コントローラが前記スライダ情報を前記複数のモジュールコントローラに送信し、
制御対象のスライダが存在するモジュールのモジュールコントローラが、隣接するスライダとの衝突を防止するように制御対象のスライダを制御する衝突防止制御方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、複数のモジュールを有する搬送経路を複数のスライダが移動する搬送装置に用いられる衝突防止制御システム及び方法に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
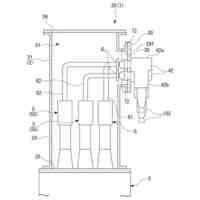
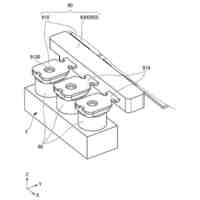
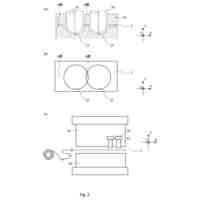
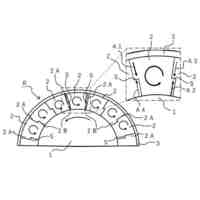
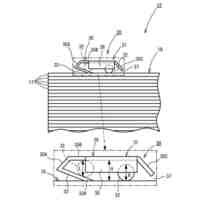
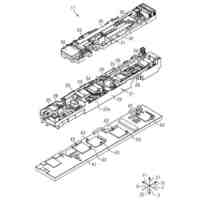
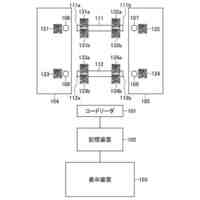
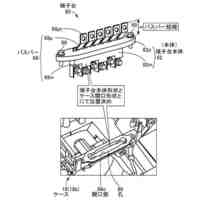
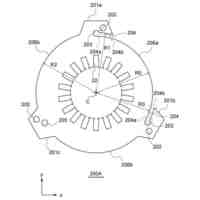
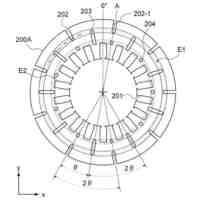
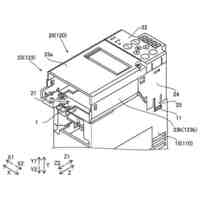
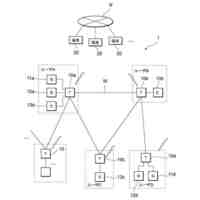
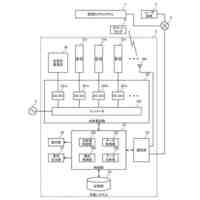
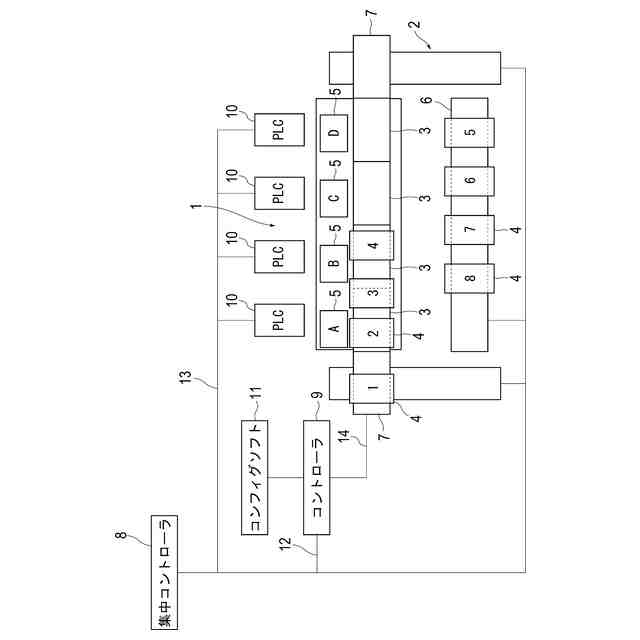
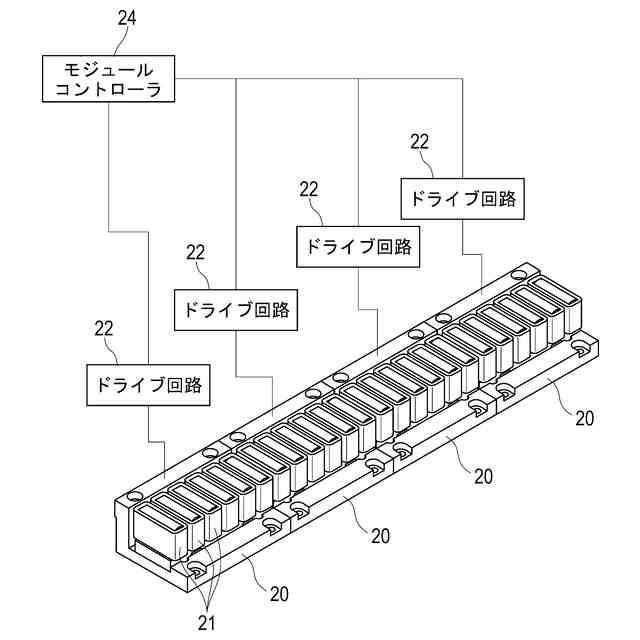
搬送経路を複数のスライダが移動する搬送装置が開発されている。搬送経路は、複数のモジュールを組み合わせて構成される。モジュールには、リニアモータの固定子となる複数のコイル、複数のコイルに供給する電力を制御するドライブ回路が設けられる。スライダには、リニアモータの可動子となる永久磁石が設けられる。複数のコイルに供給する電力をドライブ回路によって制御し、複数のコイルに移動磁場を発生させると、スライダが搬送経路に沿って移動する。
【0003】
この種の搬送装置には、従来のベルトコンベヤに比べて、優れた柔軟性があるという特徴がある。例えば、従来のベルトコンベヤのように複数のスライダを一斉に移動させる必要がなく、複数のスライダを個別に移動させ、位置決めできる。また、モジュールを適宜組み替えれば、用途に応じた適切な搬送経路にすることができる。このため、この種の搬送装置は、様々な用途(製造、加工、パッケージング等)で利用されている。
【0004】
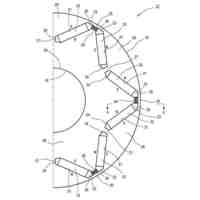
典型的な搬送経路は閉じていて、スライダが閉じた搬送経路を繰り返し移動する。搬送経路の近傍には、スライダと協働して仕事を行う複数のアクチュエータが配置される。例えば、スライダが製品供給アクチュエータの前で停止すると、アクチュエータがスライダに製品を供給する。次に、スライダが他のアクチュエータの前で停止すると、他のアクチュエータがスライダ上の製品を加工、組立て等する。次に、スライダが製品取出しアクチュエータの前で停止すると、アクチュエータがスライダから製品を取り出す。以降は上記のサイクルを繰り返す。
【0005】
複数のスライダが搬送経路を移動する搬送装置においては、スライダ同士の衝突を防止することが重要である。例えば、進行方向前方のスライダが停止したとき、衝突を防止するために後方のスライダも停止する必要がある。
【0006】
従来の衝突防止制御方法として、前方のスライダと後方のスライダのスライダ間距離が予め設定された閾値以下のとき、後方のスライダを停止させることが行われている(特許文献1参照)。
【先行技術文献】
【特許文献】
【0007】
特開2022-184755号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
しかし、従来の衝突防止制御方法においては、スライダの衝突防止のための計算や制御を集中コントローラが行っている。このため、スライダの数が増えるにしたがって、集中コントローラの計算負荷が増大するという課題がある。
【0009】
本発明は上記の課題に鑑みてなされたものであり、集中コントローラの計算負荷を低減できる衝突防止制御システム及び方法を提供することを目的とする。
【課題を解決するための手段】
【0010】
上記課題を解決するために、本発明の一態様は、複数のモジュールを有する搬送経路を複数のスライダが移動する搬送装置に用いられる衝突防止制御システムであって、コントローラと、複数のモジュールのドライブ回路を制御する複数のモジュールコントローラと、を備え、前記スライダが存在するモジュールのモジュールコントローラが前記スライダの少なくとも識別IDと現在位置を含むスライダ情報を前記コントローラに送信し、前記コントローラが前記スライダ情報を前記複数のモジュールコントローラに送信し、制御対象のスライダが存在するモジュールのモジュールコントローラが、隣接するスライダとの衝突を防止するように制御対象のスライダを制御する衝突防止制御システムである。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
静電モータ
7日前
個人
通電確認器具
14日前
株式会社アイシン
制御装置
16日前
株式会社ExH
接触ユニット
11日前
株式会社東光高岳
開閉装置
今日
株式会社アイシン
車両用駆動装置
7日前
竹内工業株式会社
配線ダクト
1日前
トヨタ自動車株式会社
積層コア
7日前
日産自動車株式会社
ロータ
7日前
株式会社高砂製作所
力率改善回路
11日前
株式会社豊田自動織機
回転電機のロータ
14日前
株式会社豊田自動織機
回転電機のロータ
7日前
日産自動車株式会社
ロータ
1日前
住友電装株式会社
電気接続箱
14日前
住友電装株式会社
電気接続箱
15日前
住友電装株式会社
電気接続箱
11日前
住友電装株式会社
電気接続箱
15日前
住友電装株式会社
電気接続箱
15日前
アズビル株式会社
配線確認システム
7日前
トヨタ自動車株式会社
電動車両
7日前
株式会社豊田自動織機
回転電機
11日前
富士電機株式会社
電力変換装置
14日前
株式会社ジェイテクト
制御装置
14日前
ダイハツ工業株式会社
クレードル装置
14日前
本田技研工業株式会社
回転電機
14日前
本田技研工業株式会社
回転電機
11日前
株式会社ダイヘン
電力システム
11日前
トヨタ自動車株式会社
電動車両
14日前
富士電機株式会社
電力変換装置
1日前
株式会社ダイヘン
電力システム
11日前
株式会社デンソー
駆動回路
11日前
株式会社ミツバ
電動モータ
1日前
株式会社日立製作所
回転電機
7日前
個人
電力管理装置及び電力管理システム
8日前
株式会社JVCケンウッド
充電システム
14日前
株式会社豊田自動織機
電動圧縮機
7日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ