TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024177068
公報種別
公開特許公報(A)
公開日
2024-12-19
出願番号
2024067652
出願日
2024-04-18
発明の名称
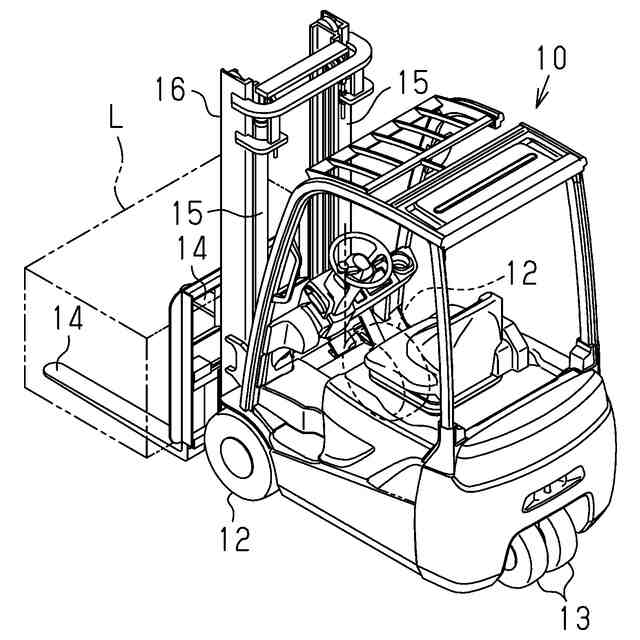
フォークリフト、及びフォークリフトの制御方法
出願人
株式会社豊田自動織機
代理人
個人
,
個人
主分類
B60L
15/20 20060101AFI20241212BHJP(車両一般)
要約
【課題】フォークリフトの操作者に違和感を与えることを抑制すること。
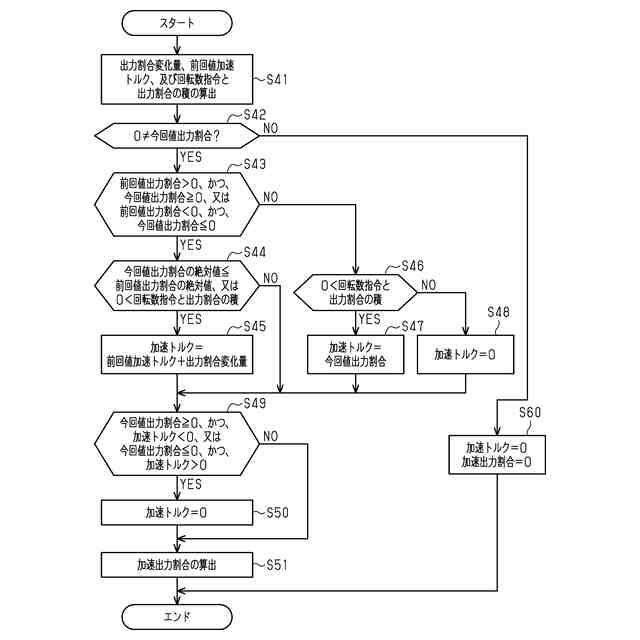
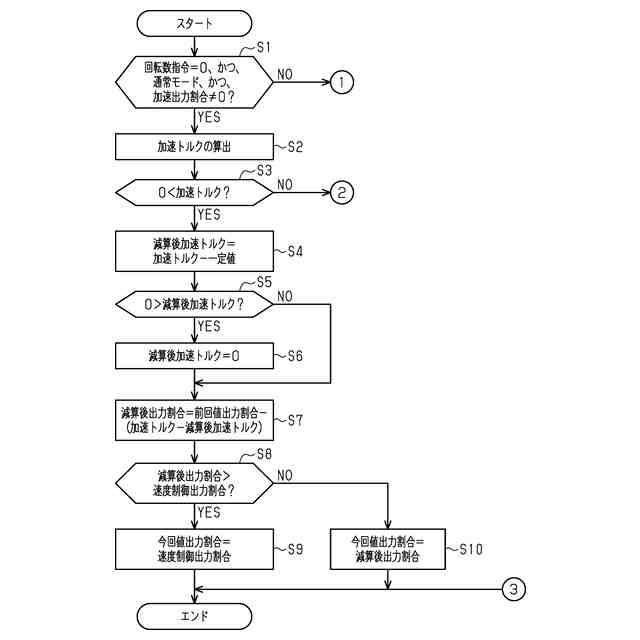
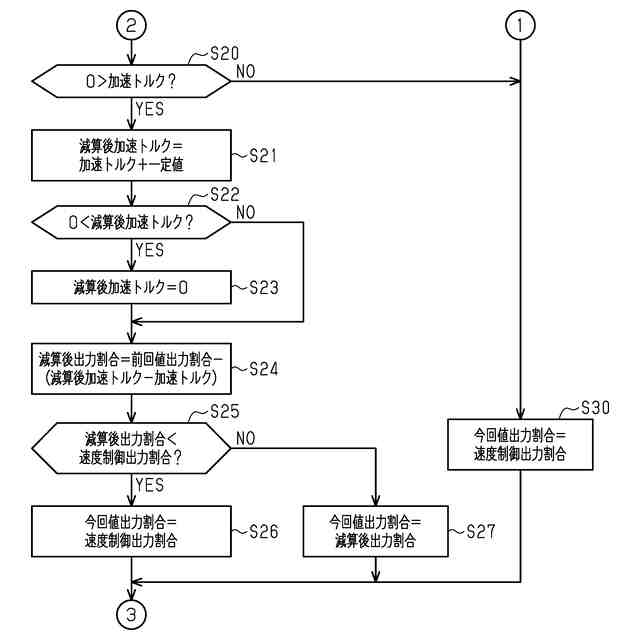
【解決手段】制御装置は、出力割合とトルク電流曲線とを掛け合わせることでトルク電流指令値を算出する。制御装置は、トルク電流指令値をインバータに対する指令値に変換することで走行モータの回転数が目標回転数に追従するように走行モータを制御する。制御装置は、今回の制御周期でのトルクが前回の制御周期でのトルクから0を跨いで変化していない場合に、今回の制御周期での出力割合と前回の制御周期で出力割合との差を加速トルクとして積算していく。制御装置は、今回の制御周期での回転数指令が0の場合、前回の制御周期での出力割合のうち加速成トルクのみを所定値小さくした値を今回の制御周期での出力割合とする。
【選択図】図6
特許請求の範囲
【請求項1】
アクセル部材と、
走行モータと、
前記走行モータを駆動させるインバータと、
前記インバータを制御する制御装置と、を備え、
前記制御装置は、
前記アクセル部材の操作量に応じた回転数指令を取得し、
前記回転数指令、加速度指令、及び減速度指令に基づいて目標回転数を算出し、
前記走行モータの回転数と前記目標回転数との偏差を算出し、
前記偏差、比例ゲイン、及び積分ゲインに基づいて出力割合を算出し、
前記出力割合とトルク電流曲線とを掛け合わせることでトルク電流指令値を算出し、
前記トルク電流指令値を前記インバータに対する指令値に変換することで前記走行モータの回転数が前記目標回転数に追従するように前記走行モータを制御し、
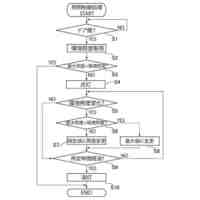
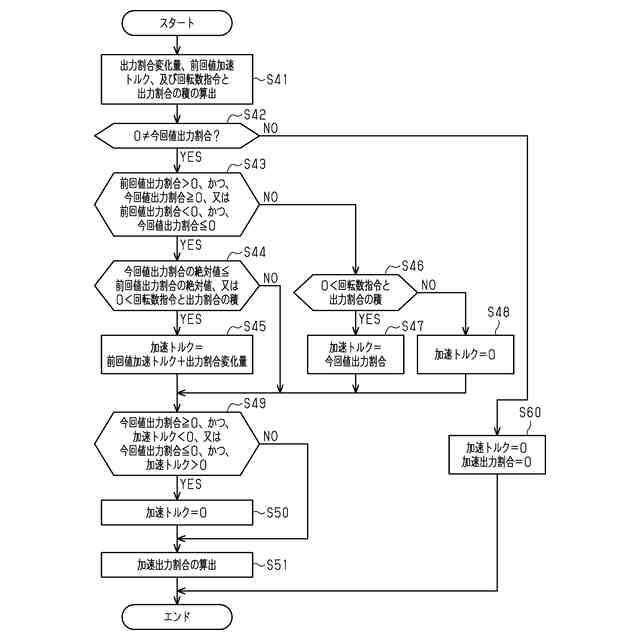
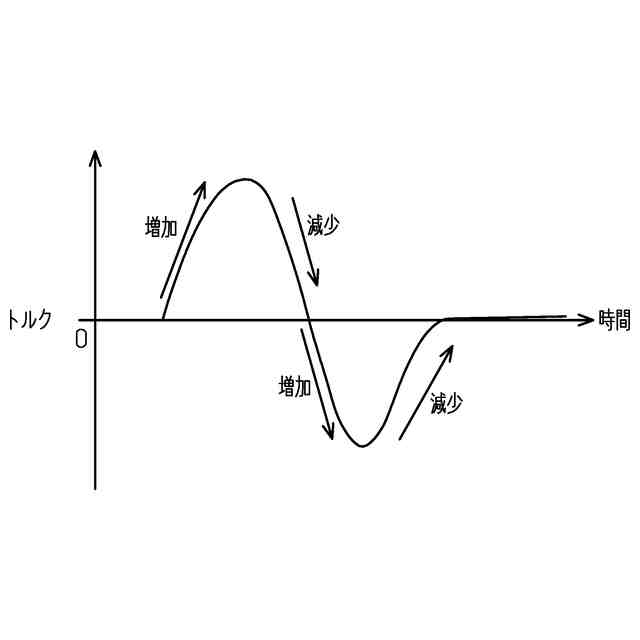
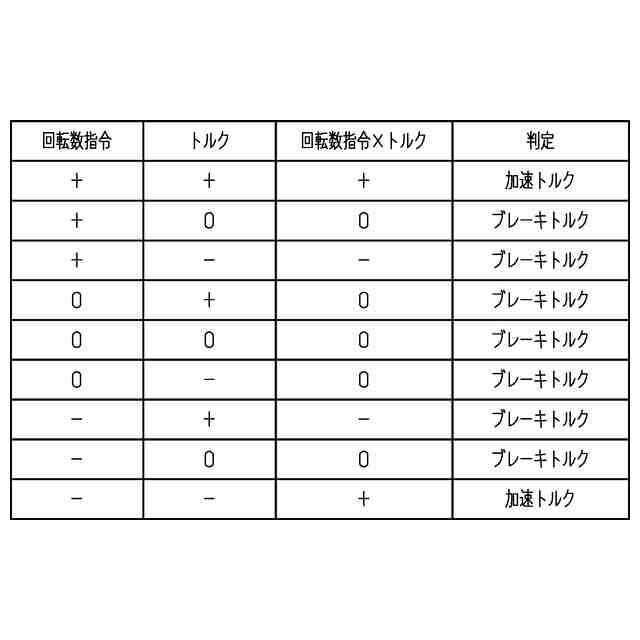
前記出力割合のうち加速に寄与する成分を加速成分とし、前記出力割合のうちブレーキに寄与する成分をブレーキ成分とした場合、今回の制御周期でのトルクが前回の制御周期でのトルクから0を跨いで変化していない場合であって、今回の制御周期での前記出力割合の絶対値が前回の制御周期での前記出力割合の絶対値以下である第1条件又は前記回転数指令と今回の制御周期での前記出力割合との積が0より大きい第2条件が成立する場合、今回の制御周期での前記出力割合と前回の制御周期での前記出力割合との差を前記加速成分として積算していき、
前記加速成分、及び今回の制御周期での前記出力割合から予め定められた最大数を上限とする加速出力割合を算出し、
今回の制御周期での前記回転数指令が0であり、かつ、前記加速出力割合が0とは異なる値の場合、前回の制御周期での前記出力割合のうち前記加速成分のみを所定値小さくした値を今回の制御周期での前記出力割合とする、フォークリフト。
続きを表示(約 1,000 文字)
【請求項2】
平坦路で前記フォークリフトの押し込み操作を行った場合、前回の制御周期での前記出力割合は前記加速成分のみを含む、請求項1に記載のフォークリフト。
【請求項3】
坂路で前記フォークリフトを停止させる場合、前回の制御周期での前記出力割合は前記ブレーキ成分のみを含む、請求項1又は請求項2に記載のフォークリフト。
【請求項4】
アクセル部材と、
走行モータと、
前記走行モータを駆動させるインバータと、
前記インバータを制御する制御装置と、を備えたフォークリフトの制御方法であって、
前記制御装置が、
前記アクセル部材の操作量に応じた回転数指令を取得することと、
前記回転数指令、加速度指令、及び減速度指令に基づいて目標回転数を算出することと、
前記走行モータの回転数と前記目標回転数との偏差を算出することと、
前記偏差、比例ゲイン、及び積分ゲインに基づいて出力割合を算出することと、
前記出力割合とトルク電流曲線とを掛け合わせることでトルク電流指令値を算出することと、
前記トルク電流指令値を前記インバータに対する指令値に変換することで前記走行モータの回転数が前記目標回転数に追従するように前記走行モータを制御することと、
前記出力割合のうち加速に寄与する成分を加速成分とし、前記出力割合のうちブレーキに寄与する成分をブレーキ成分とした場合、今回の制御周期でのトルクが前回の制御周期でのトルクから0を跨いで変化していない場合であって、今回の制御周期での前記出力割合の絶対値が前回の制御周期での前記出力割合の絶対値以下である第1条件又は前記回転数指令と今回の制御周期での前記出力割合との積が0より大きい第2条件が成立する場合、今回の制御周期での前記出力割合と前回の制御周期での前記出力割合との差を前記加速成分として積算していくことと、
前記加速成分、及び今回の制御周期での前記出力割合から予め定められた最大数を上限とする加速出力割合を算出することと、
今回の制御周期での前記回転数指令が0であり、かつ、前記加速出力割合が0とは異なる値の場合、前回の制御周期での前記出力割合のうち前記加速成分のみを所定値小さくした値を今回の制御周期での前記出力割合とすることと、を含む、フォークリフトの制御方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、フォークリフト、及びフォークリフトの制御方法に関する。
続きを表示(約 3,400 文字)
【背景技術】
【0002】
特許文献1に開示の車両は、走行モータと、走行モータを駆動させるインバータと、インバータを制御する制御装置と、を備える。制御装置は、走行モータの力行によって車両を走行させる。制御装置は、走行モータの回生によって車両を制動させる。制御装置は、走行モータの回転数が目標回転数に追従するようにフィードバック制御を行う。フィードバック制御は、走行モータの回転数と目標回転数との偏差を小さくするように行われる。フィードバック制御は、例えば、比例積分制御である。特許文献2に開示のフォークリフトは、荷役装置を備える。荷役装置は、フォークと、マストと、を備える。
【先行技術文献】
【特許文献】
【0003】
特開2020-68596号公報
特開2023-46547号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
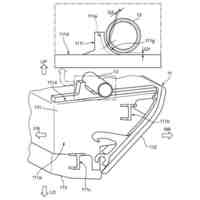
フォークリフトでは、押し込み操作が行われる場合がある。押し込み操作は、置かれている荷に対してフォークを押し込む操作である。例えば、フォークリフトの走行中に荷がフォークから落下することを抑制するため、荷をフォークの基端まで移動させる際に押し込み操作は行われる。押し込み操作を行うと、荷がマストに接触する。この状態でアクセル部材を操作しても、荷と荷が置かれている場所との界面に生じる静止摩擦力によってフォークリフトが走行しない。即ち、アクセル部材を操作すると、目標回転数と走行モータの回転数との偏差が大きくなっていく。
【0005】
特許文献1に開示のように、走行モータの回転数が目標回転数に追従するようにフィードバック制御を行う場合、走行モータの回転数と目標回転数との偏差が大きいほどトルクを大きくしていく。このため、フォークリフトで押し込み操作が行われている場合、偏差が大きくなるにつれてトルクも大きくなっていく。押し込み操作の終了に伴い、アクセル部材が操作されなくなると、偏差が0になる。偏差が0になると、直前のトルクが維持されるため、アクセル部材が操作されていないにも関わらずトルクが生じている状態になる。この状態で、フォークを上昇させると、荷と荷が置かれている場所とが接触しなくなることによって静止摩擦力が作用しなくなる。すると、残存しているトルクによってフォークリフトが走行するおそれがある。これにより、フォークリフトの操作者に違和感を与えるおそれがある。
【課題を解決するための手段】
【0006】
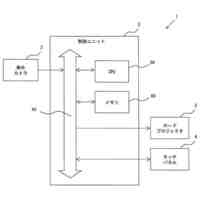
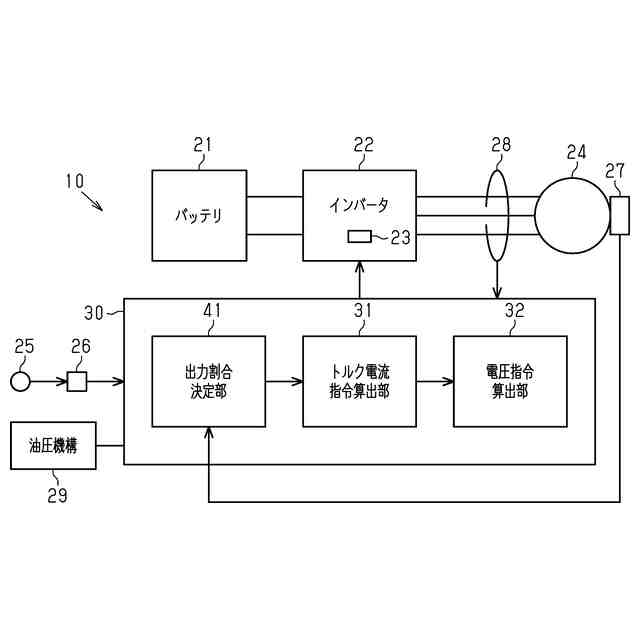
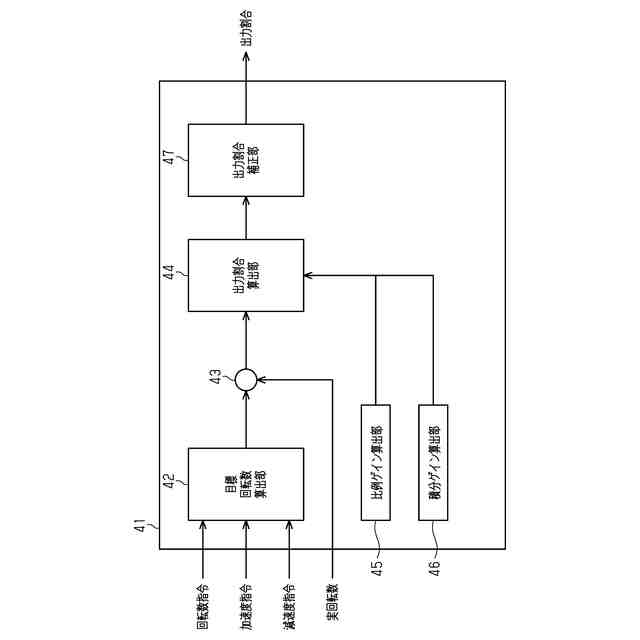
上記課題を解決するフォークリフトは、アクセル部材と、走行モータと、前記走行モータを駆動させるインバータと、前記インバータを制御する制御装置と、を備え、前記制御装置は、前記アクセル部材の操作量に応じた回転数指令を取得し、前記回転数指令、加速度指令、及び減速度指令に基づいて目標回転数を算出し、前記走行モータの回転数と前記目標回転数との偏差を算出し、前記偏差、比例ゲイン、及び積分ゲインに基づいて出力割合を算出し、前記出力割合とトルク電流曲線とを掛け合わせることでトルク電流指令値を算出し、前記トルク電流指令値を前記インバータに対する指令値に変換することで前記走行モータの回転数が前記目標回転数に追従するように前記走行モータを制御し、前記出力割合のうち加速に寄与する成分を加速成分とし、前記出力割合のうちブレーキに寄与する成分をブレーキ成分とした場合、今回の制御周期でのトルクが前回の制御周期でのトルクから0を跨いで変化していない場合であって、今回の制御周期での前記出力割合の絶対値が前回の制御周期での前記出力割合の絶対値以下である第1条件又は前記回転数指令と今回の制御周期での前記出力割合との積が0より大きい第2条件が成立する場合、今回の制御周期での前記出力割合と前回の制御周期での前記出力割合との差を前記加速成分として積算していき、前記加速成分、及び今回の制御周期での前記出力割合から予め定められた最大数を上限とする加速出力割合を算出し、今回の制御周期での前記回転数指令が0であり、かつ、前記加速出力割合が0とは異なる値の場合、前回の制御周期での前記出力割合のうち前記加速成分のみを所定値小さくした値を今回の制御周期での前記出力割合とする。
【0007】
今回の制御周期での回転数指令が0の状態は、アクセル部材が操作されていない状態である。この場合、制御装置は、前回の制御周期での出力割合のうち加速成分のみを所定値小さくした値を今回の制御周期での出力割合とする。加速成分が所定値小さくなることで、出力割合が小さくなる。従って、押し込み操作の終了に伴い回転数指令が0になると、出力割合が小さくなることでトルクが小さくなる。荷と荷が置かれている場所とが接触しなくなることによって静止摩擦力が作用しなくなった際に、アクセル部材が操作されていないにも関わらずフォークリフトの走行が開始されることが抑制される。これにより、フォークリフトの操作者に違和感を与えることを抑制できる。また、加速成分のみを小さくすることで、出力割合のうちフォークリフトのブレーキに寄与するブレーキ成分を残存させることができる。このため、フォークリフトを坂路で停止させる場合など、フォークリフトを停止させる際に出力割合が必要となる場合には、ブレーキ成分によってフォークリフトを停止させることができる。
【0008】
上記フォークリフトについて、平坦路で前記フォークリフトの押し込み操作を行った場合、前回の制御周期での前記出力割合は前記加速成分のみを含んでいてもよい。
上記フォークリフトについて、坂路で前記フォークリフトを停止させる場合、前回の制御周期での前記出力割合は前記ブレーキ成分のみを含んでいてもよい。
【0009】
上記課題を解決するフォークリフトの制御方法は、アクセル部材と、走行モータと、前記走行モータを駆動させるインバータと、前記インバータを制御する制御装置と、を備えたフォークリフトの制御方法であって、前記制御装置が、前記アクセル部材の操作量に応じた回転数指令を取得することと、前記回転数指令、加速度指令、及び減速度指令に基づいて目標回転数を算出することと、前記走行モータの回転数と前記目標回転数との偏差を算出することと、前記偏差、比例ゲイン、及び積分ゲインに基づいて出力割合を算出することと、前記出力割合とトルク電流曲線とを掛け合わせることでトルク電流指令値を算出することと、前記トルク電流指令値を前記インバータに対する指令値に変換することで前記走行モータの回転数が前記目標回転数に追従するように前記走行モータを制御することと、前記出力割合のうち加速に寄与する成分を加速成分とし、前記出力割合のうちブレーキに寄与する成分をブレーキ成分とした場合、今回の制御周期でのトルクが前回の制御周期でのトルクから0を跨いで変化していない場合であって、今回の制御周期での前記出力割合の絶対値が前回の制御周期での前記出力割合の絶対値以下である第1条件又は前記回転数指令と今回の制御周期での前記出力割合との積が0より大きい第2条件が成立する場合、今回の制御周期での前記出力割合と前回の制御周期での前記出力割合との差を前記加速成分として積算していくことと、前記加速成分、及び今回の制御周期での前記出力割合から予め定められた最大数を上限とする加速出力割合を算出することと、今回の制御周期での前記回転数指令が0であり、かつ、前記加速出力割合が0とは異なる値の場合、前回の制御周期での前記出力割合のうち前記加速成分のみを所定値小さくした値を今回の制御周期での前記出力割合とすることと、を含む。
【0010】
押し込み操作の終了に伴い回転数指令が0になると、出力割合が小さくなることでトルクが小さくなる。荷と荷が置かれている場所とが接触しなくなることによって静止摩擦力が作用しなくなった際に、アクセル部材が操作されていないにも関わらずフォークリフトの走行が開始されることが抑制される。これにより、フォークリフトの操作者に違和感を与えることを抑制できる。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
飛行自動車
2か月前
個人
警告装置
10日前
個人
小型EVシステム
12日前
日本精機株式会社
ケース
18日前
日本精機株式会社
表示装置
1か月前
日本精機株式会社
表示装置
1か月前
日本精機株式会社
表示装置
1か月前
日本精機株式会社
照明装置
1か月前
日本精機株式会社
表示装置
2か月前
日本精機株式会社
表示装置
25日前
日本精機株式会社
表示装置
25日前
日本精機株式会社
表示装置
1か月前
個人
アンチロール制御装置
1か月前
井関農機株式会社
作業車両
3か月前
個人
ブレーキシステム
23日前
株式会社松華
懸架装置
1か月前
個人
ステージカー
1か月前
個人
自走式立体型洗車場
1か月前
個人
自動車ドア開度規制ベルト
11日前
横浜ゴム株式会社
タイヤ
22日前
日本精機株式会社
車両用表示装置
1か月前
日本精機株式会社
車両用表示装置
1か月前
井関農機株式会社
作業車両
1か月前
日本精機株式会社
車両用照明装置
2か月前
マツダ株式会社
車両
3か月前
日本精機株式会社
車両用表示装置
1か月前
マツダ株式会社
車両
1か月前
株式会社ユーシン
照明装置
25日前
マツダ株式会社
車両
1か月前
帝国繊維株式会社
作業車両
17日前
コイト電工株式会社
座席装置
1か月前
スズキ株式会社
車両制御装置
19日前
個人
農業機械への架線給電システム
1か月前
エムケー精工株式会社
車両処理装置
24日前
株式会社小糸製作所
投影装置
3か月前
ダイハツ工業株式会社
車両構造
12日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ