TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024176518
公報種別
公開特許公報(A)
公開日
2024-12-19
出願番号
2023095088
出願日
2023-06-08
発明の名称
観測計画立案支援装置、方法、およびプログラム
出願人
株式会社日立製作所
代理人
弁理士法人ウィルフォート国際特許事務所
主分類
G01C
21/20 20060101AFI20241212BHJP(測定;試験)
要約
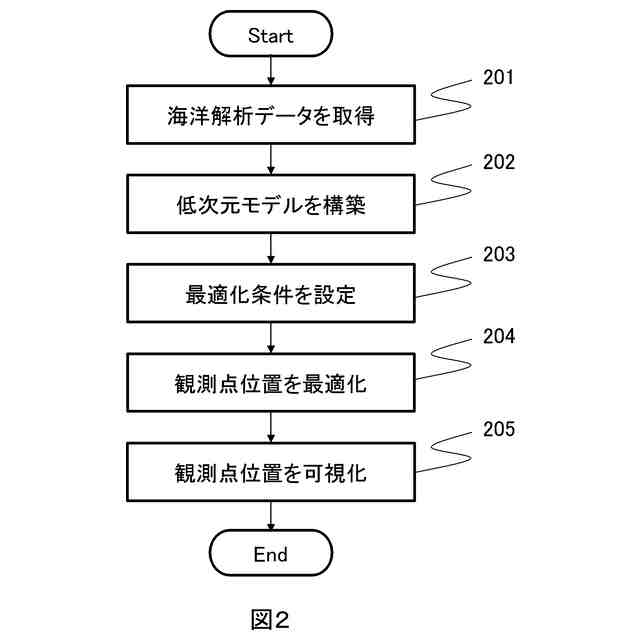
【課題】観測点において複数の深さで観測値が取得可能な場合に観測点を高速に最適化することが可能な技術を提供する。
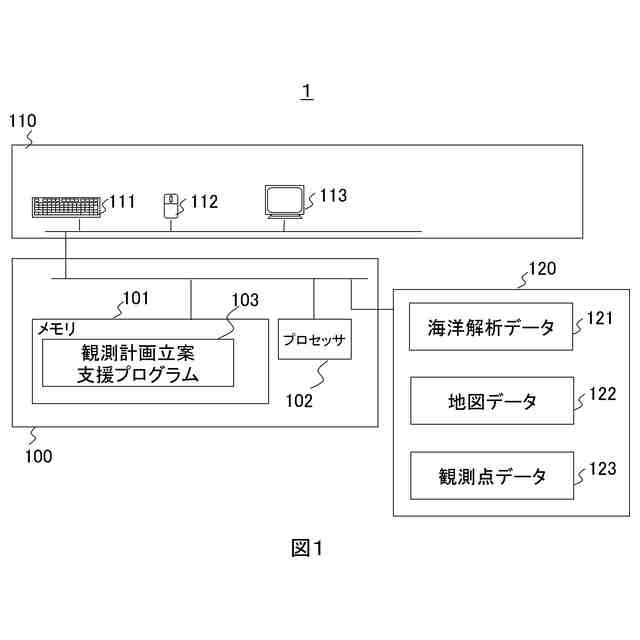
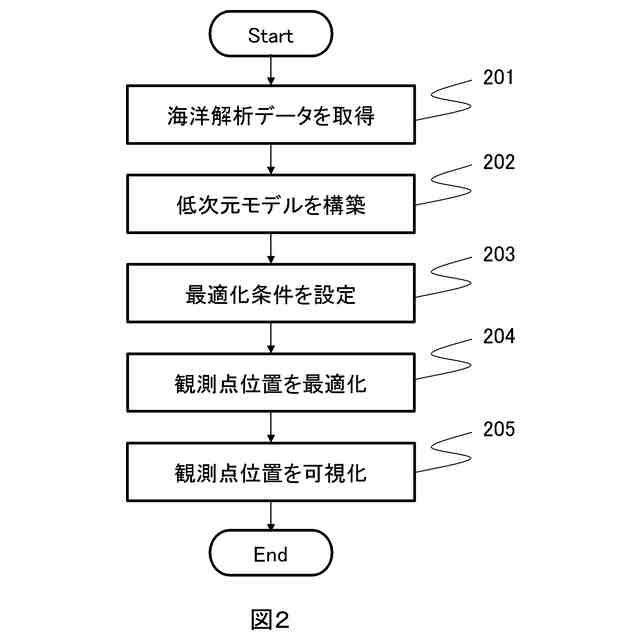
【解決手段】対象領域の水平面上に観測点を設け、前記観測点において複数の深さで対象項目の値を取得する観測計画の立案を支援する観測計画立案支援装置は、メモリと、プロセッサと、を有し、前記メモリは、二次元位置と深さとで示される格子点での対象項目の各時刻における項目値を表す時系列データを記憶し、前記プロセッサは、前記時系列データから、二次元位置および深さで表される空間のモードである空間モードを取得し、前記空間モードを基に、二次元位置を行方向にとり時刻および深さを列方向にとり前記空間モードの要素値を並べた変形空間モード行列を構築し、所定の最適化手法によって前記変形空間モード行列から所定行数の行を選択し、選択された該行によって示される二次元位置を観測点として決定する。
【選択図】図2
特許請求の範囲
【請求項1】
対象領域の水平面上に観測点を設け、前記観測点において複数の深さで対象項目の値を取得する観測計画の立案を支援する観測計画立案支援装置であって、
メモリと、プロセッサと、を有し、
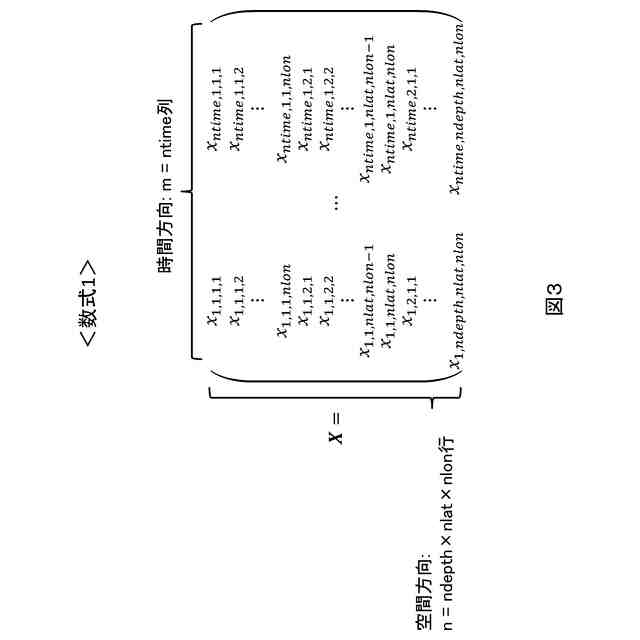
前記メモリは、二次元位置と深さとで示される格子点での対象項目の各時刻における項目値を表す時系列データを記憶し、
前記プロセッサは、
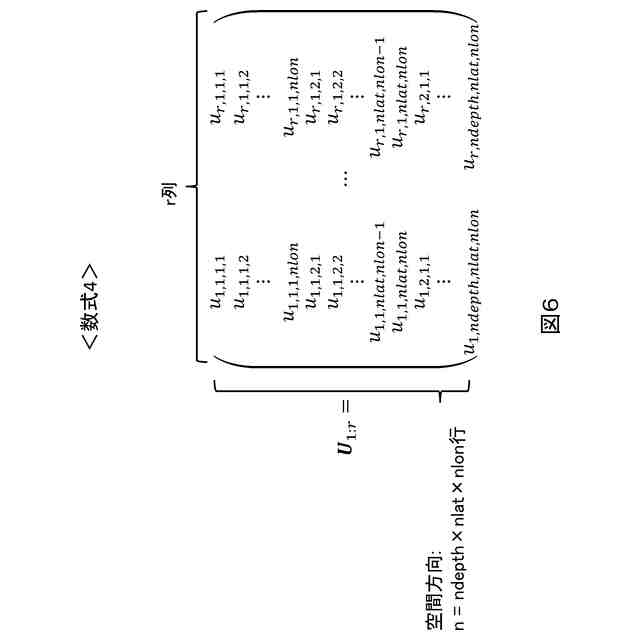
前記時系列データから、二次元位置および深さで表される空間のモードである空間モードを取得し、
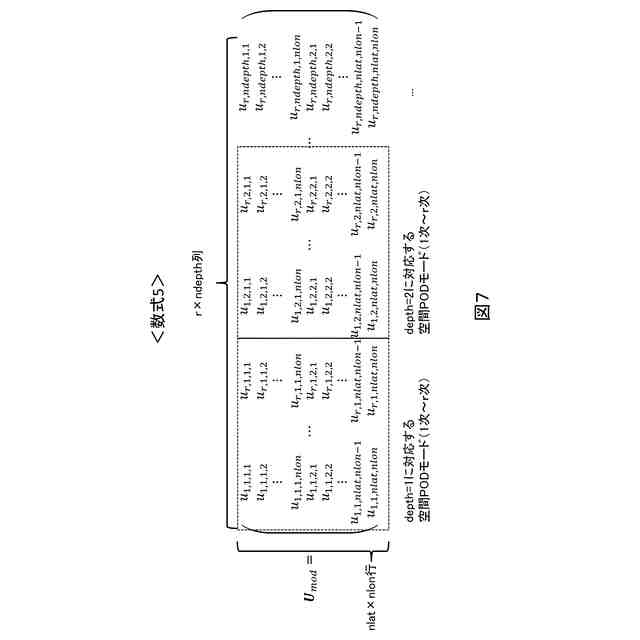
前記空間モードを基に、二次元位置を行方向にとり時刻および深さを列方向にとり前記空間モードの要素値を並べた変形空間モード行列を構築し、
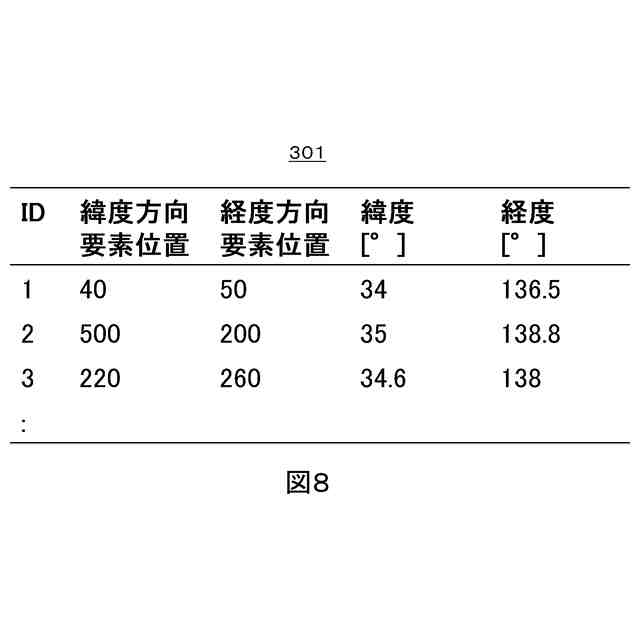
所定の最適化手法によって前記変形空間モード行列から所定行数の行を選択し、選択された該行によって示される二次元位置を観測点として決定する、
観測計画立案支援装置。
続きを表示(約 1,800 文字)
【請求項2】
前記プロセッサは、前記変形空間モード行列から、行ベクトルのノルムが大きい順に前記所定行数の行を選択し、前記観測点とする、
請求項1に記載の観測計画立案支援装置。
【請求項3】
前記プロセッサは、
前記時系列データを、前記二次元位置および前記深さを行方向にとり前記時刻を列方向にとった時系列データ行列と見なして、前記時系列データ行列を特異値分解によって前記空間モードの行列と特異値行列と時間のモードの行列とに分解することにより、前記空間モードを取得する、
請求項1に記載の観測計画立案支援装置。
【請求項4】
前記プロセッサは、
二次元位置および深さを行方向にとり時間を列方向にとって前記空間モードを表した空間モード行列の所定列数の列を抽出することにより低次元空間モード行列を構築し、
前記低次元空間モード行列を、二次元位置を行方向にとり時刻および深さを列方向にとるように変形することにより、前記変形空間モード行列を構築する、
請求項1に記載の観測計画立案支援装置。
【請求項5】
前記プロセッサは、
観測点の個数が異なる複数の集合について、当該集合に含まれる観測点での項目値を基に前記対象領域の各格子点の項目値を近似して求めた場合の近似誤差と、当該集合に含まれる観測点での観測に要するコストとを算出し、
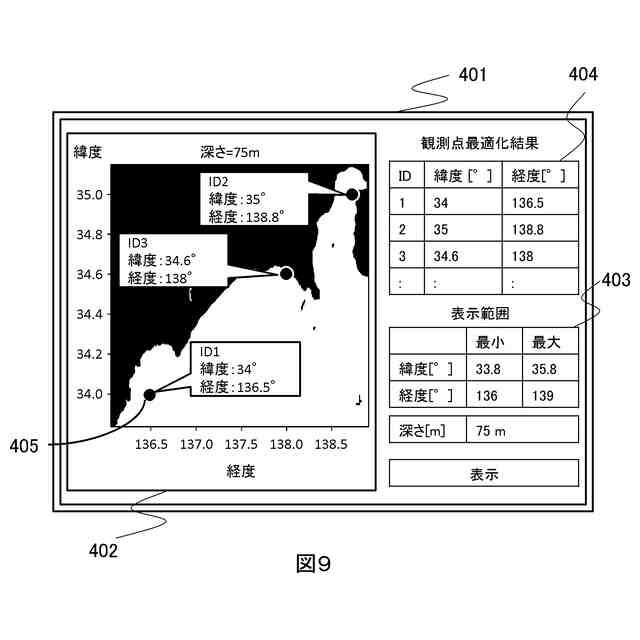
前記集合内の観測点またはその個数と、前記近似誤差と、前記コストとの関係を表す関係情報を視認可能に表示する、
請求項1に記載の観測計画立案支援装置。
【請求項6】
前記プロセッサは、
前記所定行数の行を選択することにより決定した観測点の集合によって、前記観測点での観測に要するコストを算出し、
前記観測点の集合から、削除したときの前記近似誤差の絶対値の変化が最も少ない観測点を削除して前記コストを算出することを繰り返し、
前記コストの算出の繰り返しによって得られた情報を基に前記関係情報を生成する、
請求項5に記載の観測計画立案支援装置。
【請求項7】
前記プロセッサは、
前記集合に入れる観測点の個数を変化させて、前記コストに対する前記近似誤差をプロットしたグラフを表示する、
請求項5に記載の観測計画立案支援装置。
【請求項8】
前記プロセッサは、更に、
前記集合に含まれる観測点を移動体によって移動距離が最短になる順に辿る経路を地図上に表示する、
請求項5に記載の観測計画立案支援装置。
【請求項9】
対象領域の水平面上に観測点を設け、前記観測点において複数の深さで対象項目の値を取得する観測計画の立案を支援する観測計画立案支援方法であって、
コンピュータが、
二次元位置と深さとで示される格子点での対象項目の各時刻における項目値を表す時系列データをメモリに記録し、
前記時系列データから、二次元位置および深さで表される空間のモードである空間モードを取得し、
前記空間モードを基に、二次元位置を行方向にとり時刻および深さを列方向にとり前記空間モードの要素値を並べた変形空間モード行列を構築し、
所定の最適化手法によって前記変形空間モード行列から所定行数の行を選択し、選択された該行によって示される二次元位置を観測点として決定する、
ことを実行する観測計画立案支援方法。
【請求項10】
対象領域の水平面上に観測点を設け、前記観測点において複数の深さで対象項目の値を取得する観測計画の立案を支援する観測計画立案支援プログラムであって、
コンピュータに、
二次元位置と深さとで示される格子点での対象項目の各時刻における項目値を表す時系列データをメモリに記録し、
前記時系列データから、二次元位置および深さで表される空間のモードである空間モードを取得し、
前記空間モードを基に、二次元位置を行方向にとり時刻および深さを列方向にとり前記空間モードの要素値を並べた変形空間モード行列を構築し、
所定の最適化手法によって前記変形空間モード行列から所定行数の行を選択し、選択された該行によって示される二次元位置を観測点として決定する、
ことを実行させるための観測計画立案支援プログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、移動体が観測点にてデータを取得するための観測計画の立案を支援するための技術に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
各海域の環境の変化を予測するために、各時点における各位置の環境のデータが観測される。観測および予測する環境の項目として、例えば海水温、塩分濃度などがある。海上や海中には陸上のように計測設備を固定的に設置できないため、定点観測位置を設定することが容易でない。そのため、観測船によって観測点に出向き所望の項目の観測を行うのが通常である。その場合、観測点の数を増やせば環境の予測精度は向上するが、その一方で観測に要するコストが増大する。そのため、できるだけ少ない数で、各海域の環境を高い精度で予測しうるデータを取得できるように観測点を特定し、効率の良い観測計画を立案することが求められる。
【0003】
特許文献1には、対象海域を航行している船舶によって測定された気象、海洋環境、海流等の測定データを用いて最適な航路を算出する技術が開示されている。特許文献1の手法では、測定データは数値解析による予報データに同化され、気象、海洋環境、海流の予測を高精度化する。これにより、航海時間、燃料消費量、船体運動を考慮した最適な航路を算出することが可能とされている。
【0004】
また、非特許文献1には、海面の水温時系列データを用いて、観測価値が高い位置を算出する手法について述べられている。本手法は、海面の水温の時系列データに対して固有直交分解(Proper Orthogonal Decomposition,以下POD)を適用し、得られた空間PODモードを並べたセンサ候補行列に対しQR分解を適用することで、最適な観測点を特定する。この手法により、PODモードによる低次元モデルを用いた温度場の再構築の観点から最適な観測点の位置が得られるとされている。
【0005】
さらに、非特許文献2には、観測点において複数の物理量が計測可能な場合すなわちベクトル観測が可能な場合における観測点最適化手法が述べられている。この手法により、複数の物理量が計測可能な場合に最適な観測点の位置を特定することが可能とされている。
【先行技術文献】
【特許文献】
【0006】
特開2014-13145号公報
【非特許文献】
【0007】
Manohar, K., Brunton, B. W., Kutz, J. N., & Brunton, S. L. (2018). Data-driven sparse sensor placement for reconstruction: Demonstrating the benefits of exploiting known patterns. IEEE Control Systems Magazine, 38(3), 63-86.
Saito, Y., Nonomura, T., Nankai, K., Yamada, K., Asai, K., Sasaki, Y., & Tsubakino, D. (2020). Data-driven vector-measurement-sensor selection based on greedy algorithm. IEEE Sensors Letters, 4(7), 1-4.
【発明の概要】
【発明が解決しようとする課題】
【0008】
上記特許文献1に記載の手法によれば、対象海域内で得られる測定データを活用して、航海時間、燃料消費量、船体運動等を考慮した、最適な航路を決定することができる。しかしながら、本手法は、海洋環境の予測精度の観点で測点位置の良し悪しを評価するものでは無いため、海洋環境の予測精度を高めることにはならない。
【0009】
また、上記非特許文献1に記載の手法は、海面における海水温データの観測においてその有効性が示されている。しかしながら、海面での海水温を観測するだけでなく、ひとつの観測点で深さ方向の水温の分布を観測する場合がある。例えば、expandable bathythermograph(以下XBTとする)は、航走中の観測船から投下され自由落下しながら約300m深度までの海水温を連続的に記録する装置である。このように深さ方向の各位置でデータを観測する場合に有効な手法が求められる。しかし、非特許文献1の手法は、海面における海水温データの観測においては有効であるが、深さ方向の水温分布が観測される場合に有効な観測点最適化手法とは言えない。
【0010】
また、上記非特許文献2に記載の手法は、非特許文献1の手法と同様に空間PODモードを用いるが、複数の物理量分布から求められる空間PODモードを用いるため、QR分解のような高速な手法が適用できず、特定の座標に相当するセンサ候補行列の行ベクトルノルムを個別に評価する必要があり、迅速な意思決定が求められる状況下では実用性に乏しい場合がある。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
粒子分析装置
2日前
個人
アクセサリー型テスター
3日前
日本精機株式会社
位置検出装置
19日前
株式会社ミツトヨ
画像測定機
4日前
東レ株式会社
シート状物の検査方法
17日前
株式会社テイエルブイ
振動検出装置
2日前
栄進化学株式会社
浸透探傷用濃縮液
9日前
エイブリック株式会社
電流検出回路
16日前
ダイハツ工業株式会社
試料セル
2日前
東ソー株式会社
自動分析装置及び方法
19日前
株式会社チノー
放射光測温装置
16日前
株式会社 キョーワ
食品搬送装置
16日前
日本特殊陶業株式会社
ガスセンサ
16日前
大和製衡株式会社
計量装置
9日前
日本特殊陶業株式会社
ガスセンサ
16日前
トヨタ自動車株式会社
電気自動車
3日前
株式会社熊谷組
計測システム
9日前
日本碍子株式会社
ガスセンサ
16日前
富士電機株式会社
エンコーダ
17日前
理研計器株式会社
ガス検出器
4日前
理研計器株式会社
ガス検出器
4日前
理研計器株式会社
ガス検出器
4日前
大成建設株式会社
画像表示システム
12日前
理研計器株式会社
ガス検出器
4日前
理研計器株式会社
ガス検出器
4日前
株式会社ニコン
検出装置
2日前
株式会社 システムスクエア
検査装置
10日前
株式会社ヨコオ
シートコンタクタ
19日前
株式会社デンソー
試験装置
12日前
東洋計器株式会社
超音波式流量計
9日前
TDK株式会社
温度センサ
17日前
東洋計器株式会社
超音波式流量計
9日前
東洋計器株式会社
超音波式流量計
9日前
シチズンファインデバイス株式会社
圧力検出装置
16日前
シチズンファインデバイス株式会社
圧力検出装置
16日前
株式会社豊田自動織機
電流検出装置
2日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ