TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024175999
公報種別
公開特許公報(A)
公開日
2024-12-19
出願番号
2023094168
出願日
2023-06-07
発明の名称
搬送ロボット走行制御システム、搬送ロボット走行制御方法および搬送ロボット走行制御プログラム
出願人
株式会社フジタ
代理人
弁理士法人高橋・林アンドパートナーズ
主分類
G05D
1/43 20240101AFI20241212BHJP(制御;調整)
要約
【課題】搬送ロボットの位置認識を容易かつ正確に行うことができ、搬送ロボットの走行を支援すること。
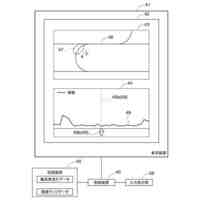
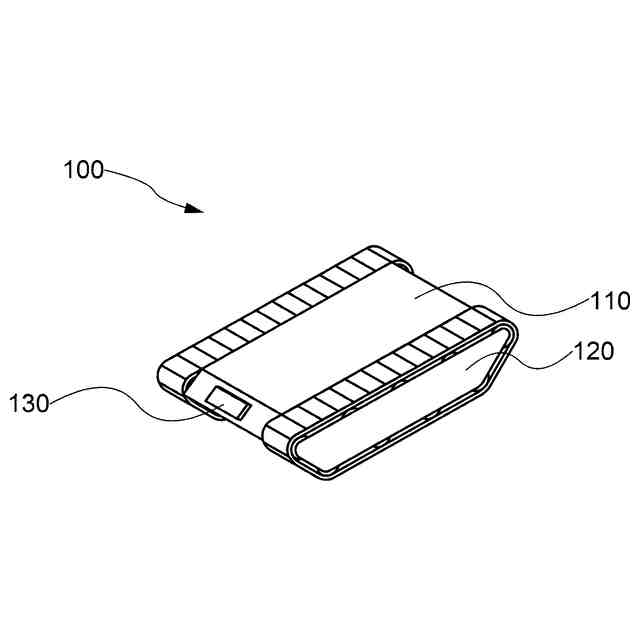
【解決手段】搬送ロボット走行制御システムは、搬送ロボットに設けられた撮像部で撮像された少なくとも一つの塗布形成された移動ラインを含む複数の画像データを取得し、前記複数の画像データのうち予め設定された特徴部分を有する画像データに基づいて位置情報を生成し、前記位置情報を用いて前記搬送ロボットの走行を指示する、制御部を有する。上記搬送ロボット走行制御システムにおいて、前記搬送ロボットは、クローラーを含んでもよい。
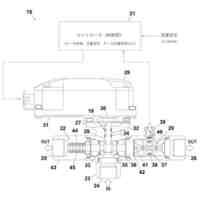
【選択図】図1
特許請求の範囲
【請求項1】
搬送ロボットに設けられた撮像部で撮像された少なくとも一つの塗布形成された移動ラインを含む複数の画像データを取得し、
前記複数の画像データのうち予め設定された特徴部分を有する画像データに基づいて位置情報を生成し、
前記位置情報を用いて前記搬送ロボットの走行を指示する、制御部を有する、
搬送ロボット走行制御システム。
続きを表示(約 1,100 文字)
【請求項2】
前記画像データに含まれる前記少なくとも一つの移動ラインが、前記搬送ロボットが走行する第1方向に延び第1色を有する第1移動ライン、および前記第1方向と交差する第2方向に延び前記第1色とは異なる第2色を有する第2移動ラインを有するとき、
前記制御部は、前記第2移動ラインを前記特徴部分に設定する、
請求項1に記載の搬送ロボット走行制御システム。
【請求項3】
前記画像データにおける前記第1移動ラインと前記第2移動ラインとが交差する部分には、前記第1移動ラインおよび前記第2移動ラインのいずれも塗布形成されないブランク部が設けられる、
請求項2に記載の搬送ロボット走行制御システム。
【請求項4】
前記画像データが、前記搬送ロボットが走行する第1方向に延びる第1移動ラインと、
前記第1方向と交差する第2方向に延びる第2移動ラインと、
前記第1移動ライン及び前記第2移動ラインのいずれかの近くに設けられたマーカーパターンを含むとき、
前記制御部は、前記マーカーパターンを前記特徴部分に設定する、
請求項3に記載の搬送ロボット走行制御システム。
【請求項5】
前記マーカーパターンは、前記第1色及び前記第2色とは異なる第3色を含む、
請求項4に記載の搬送ロボット走行制御システム。
【請求項6】
前記マーカーパターンは、識別可能な情報を含む、
請求項4に記載の搬送ロボット走行制御システム。
【請求項7】
前記搬送ロボットは、クローラーを含む、
請求項1に記載の搬送ロボット走行制御システム。
【請求項8】
コンピュータが
搬送ロボットに設けられた撮像部で撮像された少なくとも一つの塗布形成された移動ラインを含む複数の画像データを取得し、
前記複数の画像データのうち予め設定された特徴部分を有する画像データに基づいて位置情報を生成し、
前記位置情報を用いて前記搬送ロボットの走行を指示する、
搬送ロボット走行制御方法。
【請求項9】
コンピュータに、
搬送ロボットに設けられた撮像部で撮像された少なくとも一つの塗布形成された移動ラインを含む複数の画像データを取得し、
前記複数の画像データのうち予め設定された特徴部分を有する画像データに基づいて位置情報を生成し、
前記位置情報を用いて前記搬送ロボットの走行を指示することを実行させる、
搬送ロボット走行制御プログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、搬送ロボット走行制御システム、搬送ロボット走行制御方法および搬送ロボット走行制御プログラムに関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
近年、自動搬送車(AGV:AutomaticGuidedVehicle)の技術開発が進み、さまざまな場面でAGVが利用され始めている。例えば、商品が保管された倉庫でAGVを利用すれば、多種多様な商品を自動で搬送することが可能となる。そのため、作業効率が向上し、コストを削減することができる。このようなAGVとして、特許文献1にはAGVが台車の下に潜り込み、AGVが台車を持ち上げて牽引する技術が開示されている。
【0003】
一方、自動搬送車が台車を持ち上げるためにはパワーを必要とするため、自動搬送車が大型化する。特に、建設現場の資材は重量が大きなものが多く、このような資材を積載した台車を持ち上げるためには、さらなるパワーを必要とし、自動搬送車はさらに大型化することになる。そのため、台車のキャスターを利用し、台車の下方で台車と連結し、台車を牽引することができるライントレース機能および自動追従機能を有する小型の自動搬送ロボットの開発が進められている。ライントレースの場合、作業現場に搬送ロボット専用の移動ライン(導線)を形成し、自動搬送ロボットが移動ラインを認識して目的地まで到達することができる。ライントレースの方法として、特許文献2では磁気テープ,特許文献3ではマーカーパターンとオドメトリ、特許文献4ではランドマーク画像投影装置またはSimultaneous Localization AND Mapping(以下SLAM)を用いた自己位置認識方法が開示されている。
【先行技術文献】
【特許文献】
【0004】
特開2019-59460号公報
特開2019-204195号公報
特開2021-144363号公報
特開2022-093887号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
AGVが移動するとき、建設現場では工場と異なり路面に段差が存在する。そのため、AGVの走行部には段差に強いクローラーが用いられる場合がある。しかしながら、クローラーは地面との摩擦が強いため、特許文献2に開示された磁気テープを用いた場合、旋回時に地面に貼られたテープを剥がしてしまうという課題がある。また、クローラーの場合、滑りが多く、タイヤほど正確に特許文献3に開示されたオドメトリを取得できないという課題がある。また、建設現場は、工場と異なり、周辺環境が頻繁に変わる。そのため、特許文献4に開示されたSLAMを用いる場合、地図の更新が頻繁に必要となる。
【0006】
そこで、本発明は、上記問題に鑑み、搬送ロボットの位置認識を容易かつ正確に行うことができ、搬送ロボットの走行を支援することを目的の一つとする。
【課題を解決するための手段】
【0007】
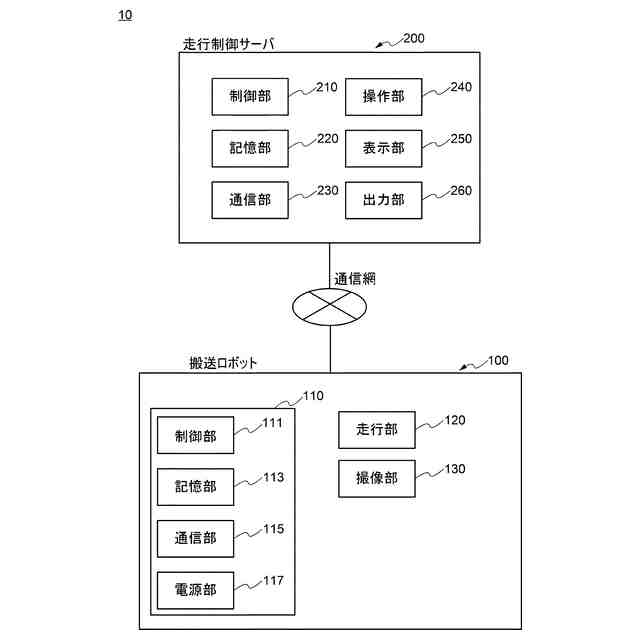
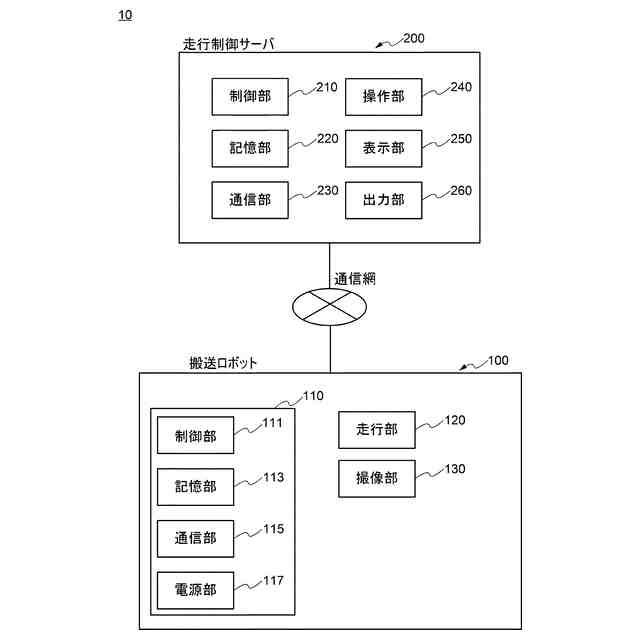
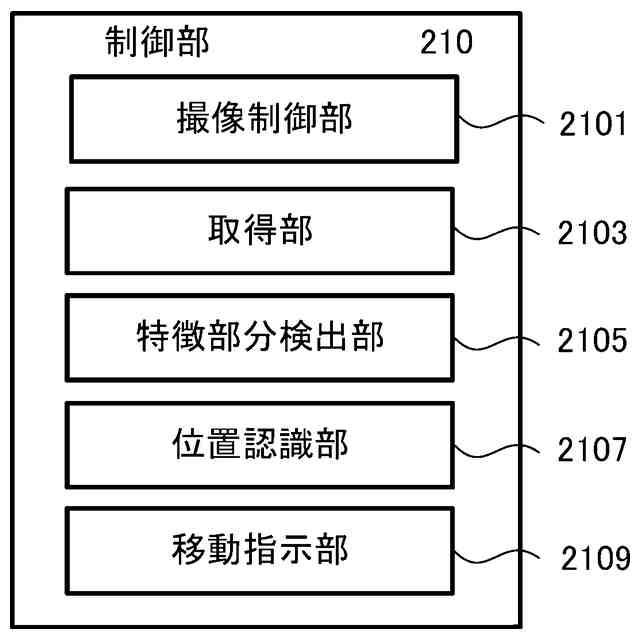
本発明の一実施形態によれば、搬送ロボットに設けられた撮像部で撮像された少なくとも一つの塗布形成された移動ラインを含む複数の画像データを取得し、前記複数の画像データのうち予め設定された特徴部分を有する画像データに基づいて位置情報を生成し、前記位置情報を用いて前記搬送ロボットの走行を指示する、制御部を有する、搬送ロボット走行制御システムが提供される。
【0008】
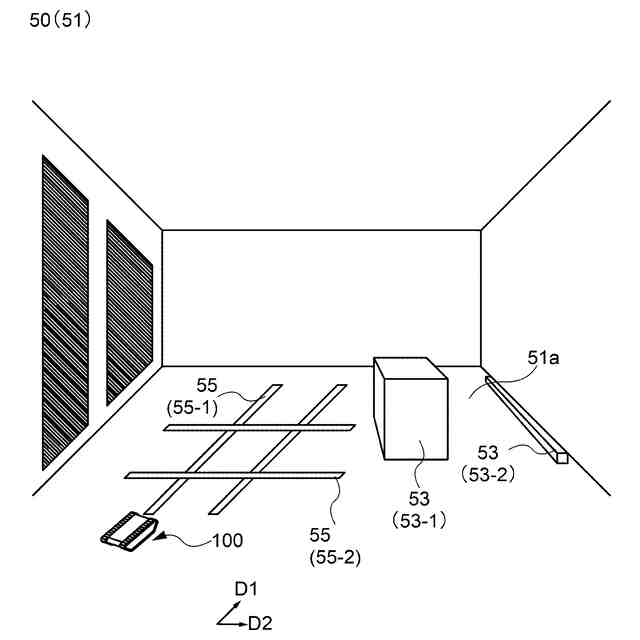
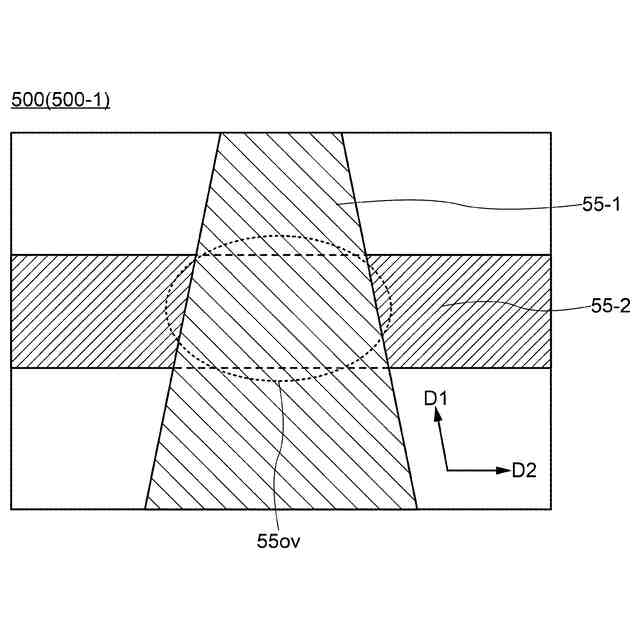
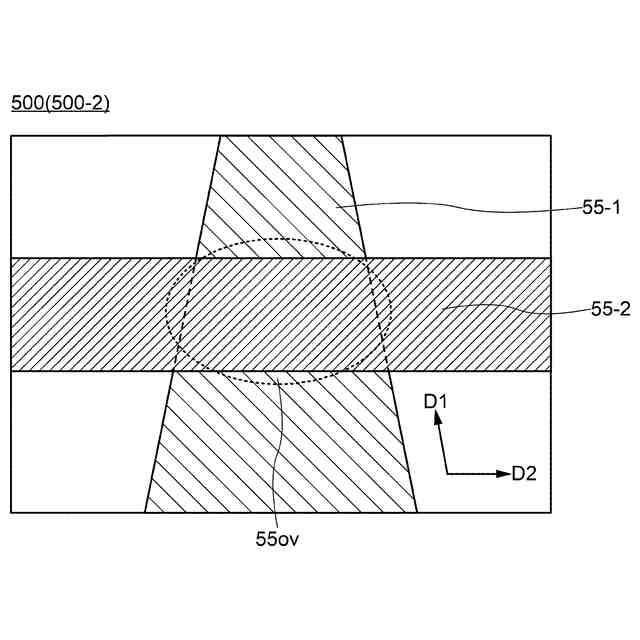
上記搬送ロボット走行制御システムにおいて、前記画像データに含まれる前記少なくとも一つの移動ラインが、前記搬送ロボットが走行する第1方向に延び第1色を有する第1移動ライン、および前記第1方向と交差する第2方向に延び前記第1色とは異なる第2色を有する第2移動ラインを有するとき、前記制御部は、前記第2移動ラインを前記特徴部分に設定してもよい。
【0009】
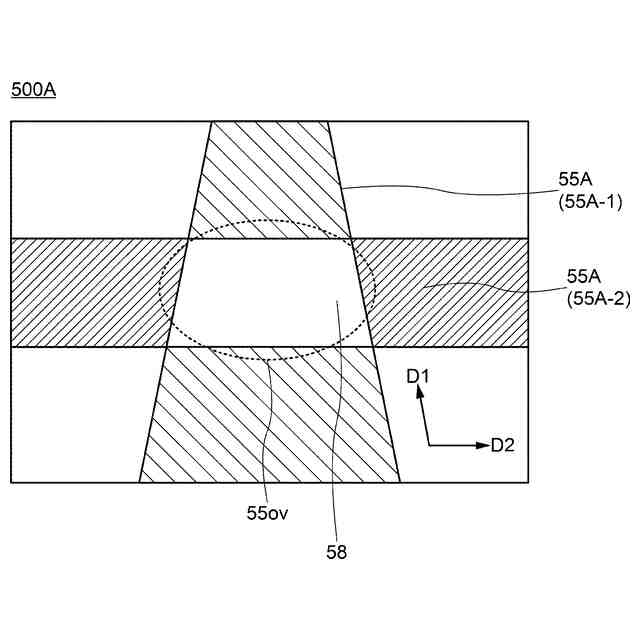
上記搬送ロボット走行制御システムにおいて、前記画像データにおける前記第1移動ラインと前記第2移動ラインとが交差する部分には、前記第1移動ラインおよび前記第2移動ラインのいずれも塗布形成されないブランク部が設けられてもよい。
【0010】
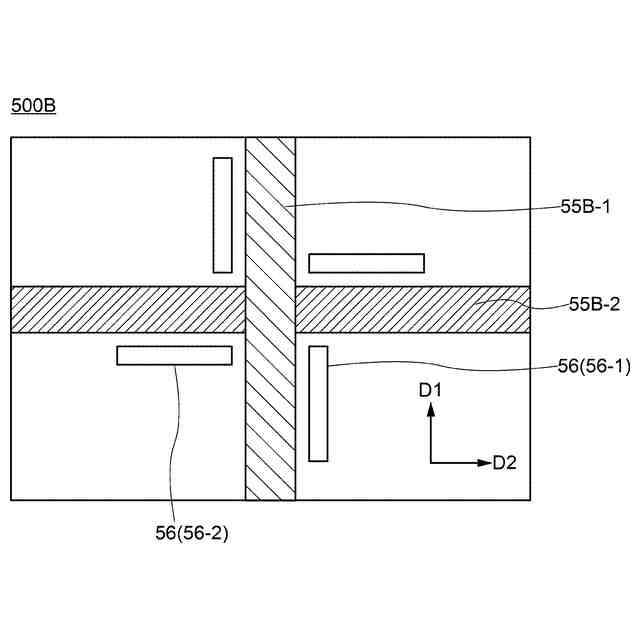
上記搬送ロボット走行制御システムにおいて、前記画像データが、前記搬送ロボットが走行する第1方向に延びる第1移動ラインと、前記第1方向と交差する第2方向に延びる第2移動ラインと、前記第1移動ライン及び前記第2移動ラインのいずれかの近くに設けられたマーカーパターンを含むとき、前記制御部は、前記マーカーパターンを前記特徴部分に設定してもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
方向検出器
1か月前
ugo株式会社
移動体
1か月前
積水樹脂株式会社
磁性シート
2か月前
個人
車両レバー操作装置
2か月前
エイブリック株式会社
基準電圧回路
2か月前
神港テクノス株式会社
制御装置
17日前
株式会社ダイヘン
移動体
17日前
株式会社ダイヘン
移動体
17日前
トヨタ自動車株式会社
自律移動体
1か月前
エイブリック株式会社
基準電圧回路装置
2か月前
トヨタ自動車株式会社
配送システム
10日前
トヨタ自動車株式会社
搬送システム
1か月前
トヨタ自動車株式会社
搬送ロボット
1か月前
株式会社フジキン
流体制御装置
11日前
トヨタ自動車株式会社
位置推定システム
1か月前
トヨタ自動車株式会社
自律移動システム
1か月前
株式会社ダイフク
搬送設備
23日前
トヨタ自動車株式会社
ロボットシステム
1か月前
株式会社栗本鐵工所
操作装置
1か月前
株式会社FUJI
工作機械の操作システム
1か月前
ローム株式会社
電源回路
5日前
株式会社ダイフク
物品搬送設備
17日前
株式会社ダイフク
物品搬送設備
1か月前
ローム株式会社
電源回路
10日前
トヨタ自動車株式会社
群制御システム及び方法
16日前
株式会社豊田自動織機
無人走行体の走行制御システム
2か月前
東フロコーポレーション株式会社
流量制御装置
3日前
村田機械株式会社
搬送車システム
17日前
CKD日機電装株式会社
モデルフリーポジカスト制御
1か月前
横河電機株式会社
モジュール
2か月前
トヨタ自動車株式会社
操作装置及び移動ロボット
1か月前
株式会社ダイフク
情報表示システム
3日前
株式会社豊田自動織機
移動体制御システム
2か月前
本田技研工業株式会社
運転補助装置
2か月前
ローム株式会社
リニア電源
17日前
日本信号株式会社
自律走行ロボットシステム
2か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ