TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024175860
公報種別
公開特許公報(A)
公開日
2024-12-19
出願番号
2023093910
出願日
2023-06-07
発明の名称
計測装置、計測方法およびプログラム
出願人
三菱重工業株式会社
代理人
個人
,
個人
,
個人
,
個人
,
個人
主分類
G01B
11/14 20060101AFI20241212BHJP(測定;試験)
要約
【課題】非接触で精度よく、回転機械における回転体とケーシングのクリアランスを計測する方法を提供する。
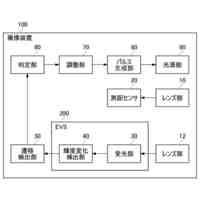
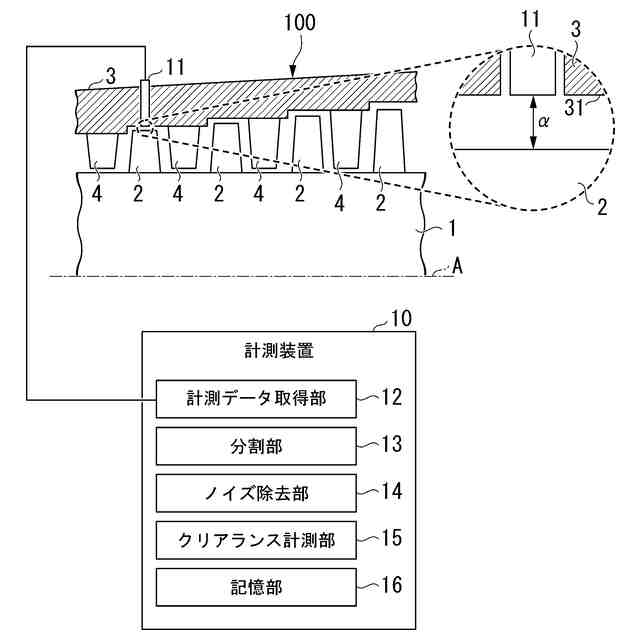
【解決手段】計測装置は、回転機械における回転体と前記回転体を囲むケーシングと間のクリアランスを計測する計測装置であって、回転中の前記回転体へ前記ケーシングから照射した光の反射光の強度の計測データと、前記反射光に基づく前記ケーシングと前記回転体の間の距離の計測データを取得する手段と、前記反射光の強度の計測データに基づいて、取得された前記距離の計測データからスパイク状のノイズを除去する手段と、ノイズ除去後の複数の前記距離の計測データを統計処理し、前記クリアランスの計測値を算出する手段と、を備える。
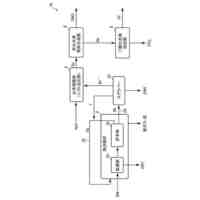
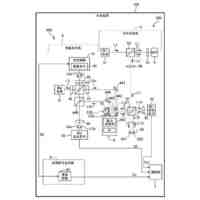
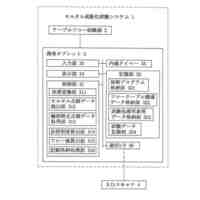
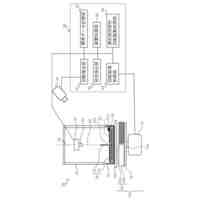
【選択図】図1
特許請求の範囲
【請求項1】
回転機械における回転体と前記回転体を囲むケーシングとの間のクリアランスを計測する計測装置であって、
回転中の前記回転体へ前記ケーシングから照射した光の反射光の強度の計測データと、前記反射光に基づく前記ケーシングと前記回転体との間の距離の計測データとを取得する手段と、
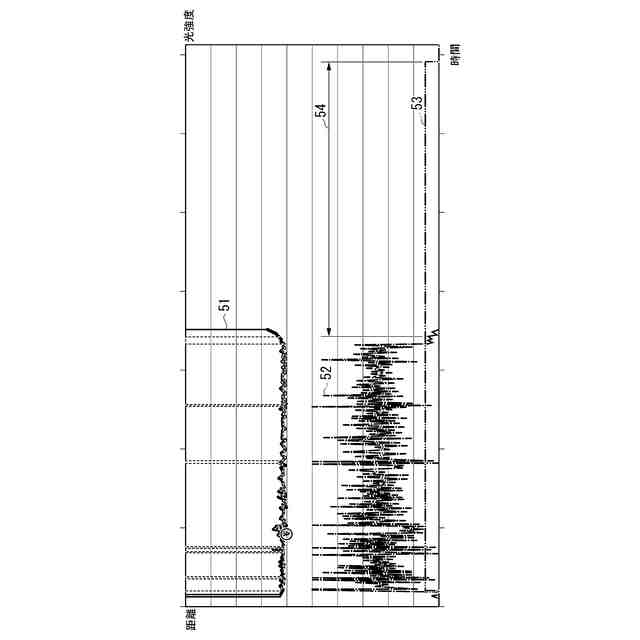
前記反射光の強度の計測データに基づいて、取得された前記距離の計測データからスパイク状のノイズを除去する手段と、
ノイズ除去後の複数の前記距離の計測データを統計処理し、前記クリアランスの計測値を算出する手段と、
を備える計測装置。
続きを表示(約 1,600 文字)
【請求項2】
前記ノイズを除去する手段は、前記反射光の強度が所定の第1閾値より小さい前記反射光に基づく前記距離の計測データを除去する、
請求項1に記載の計測装置。
【請求項3】
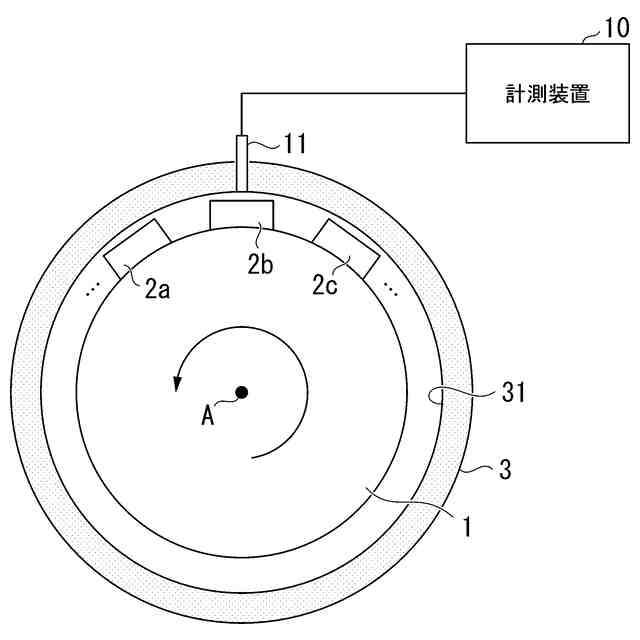
前記回転体は、回転自在に支持されたロータと前記ロータの外周に周方向に沿って複数設けられた動翼であって、
前記反射光の強度の計測データに基づいて、取得された前記反射光の強度の計測データおよび前記距離の計測データを前記動翼ごとに分割する手段、
をさらに備える請求項1又は請求項2に記載の計測装置。
【請求項4】
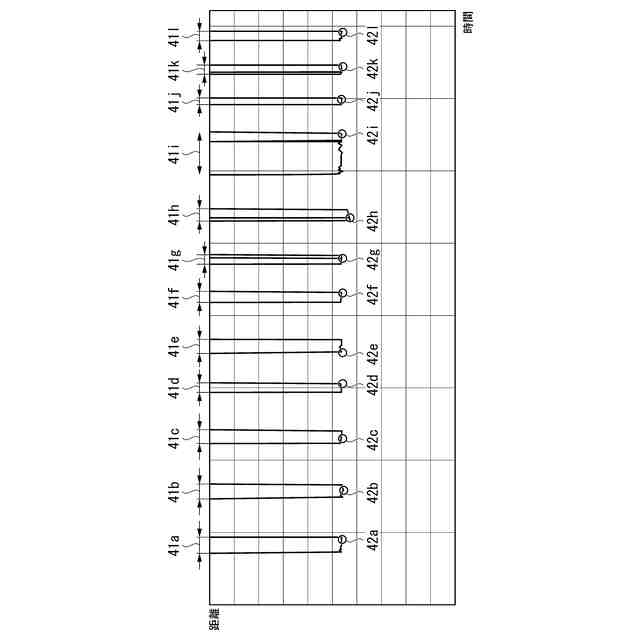
前記取得する手段は、前記回転体の回転中に計測された、時系列の前記反射光の強度の計測データと、時系列の前記距離の計測データとを取得し、
前記分割する手段は、時系列の前記反射光の強度の計測データに基づいて、前記強度が所定の第2閾値以上となった時点を開始点とし、前記開始点の後に前記強度が前記第2閾値を下回ってから所定の保持時間が経過する時点を終了点とした場合に、前記開始点から前記終了点までの間に計測された前記反射光の強度の計測データおよび前記距離の計測データを1つの前記動翼の計測データとして切り出すことにより、前記反射光の強度の計測データおよび前記距離の計測データを前記動翼ごとに分割する、
請求項3に記載の計測装置。
【請求項5】
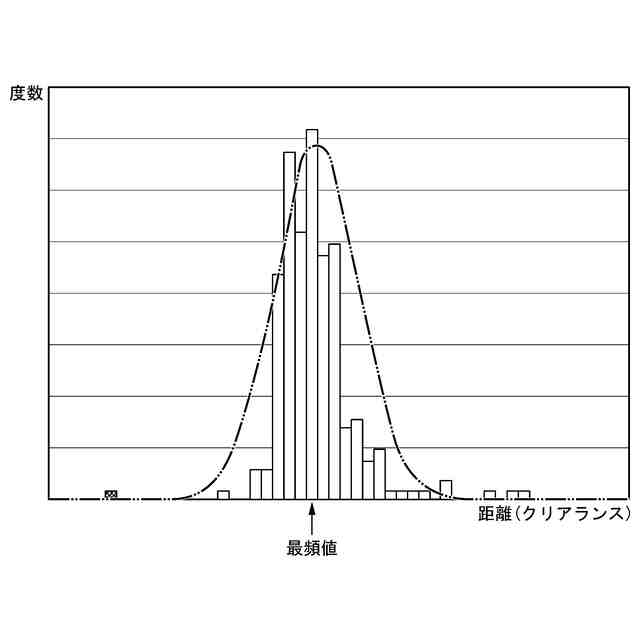
前記クリアランスの計測値を算出する手段は、ノイズ除去後の複数の前記距離の計測データのヒストグラムを算出し、前記距離の最頻値を前記クリアランスの計測値として算出する、
請求項1又は請求項2に記載の計測装置。
【請求項6】
前記クリアランスの計測値を算出する手段は、ノイズ除去後の複数の前記距離の計測データの度数分布に近似する正規分布を算出し、前記正規分布における所定の区間の最小値を前記クリアランスの計測値として算出する、
請求項1又は請求項2に記載の計測装置。
【請求項7】
前記反射光の強度を計測する手段と、
前記距離を計測する手段と、
をさらに備える請求項1又は請求項2に記載の計測装置。
【請求項8】
共焦点式センサをさらに備え、
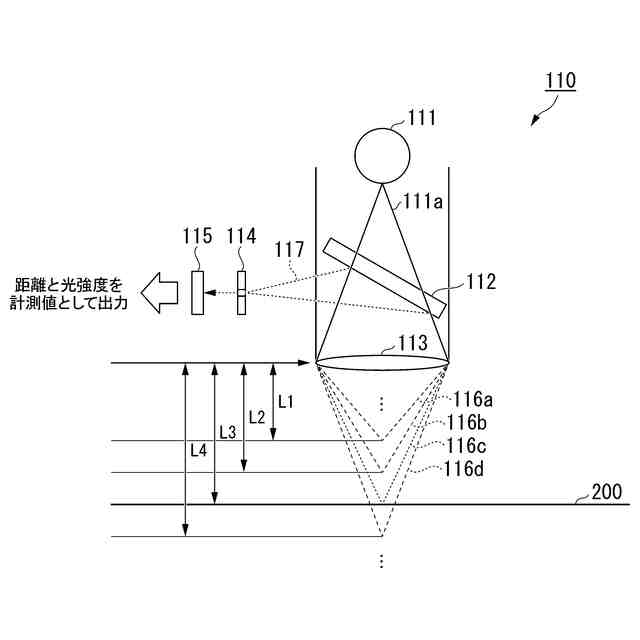
前記取得する手段は、前記共焦点式センサによって計測された前記反射光の強度の計測データと、前記距離の計測データとを取得する、
請求項1又は請求項2に記載の計測装置。
【請求項9】
回転機械における回転体と前記回転体を囲むケーシングとの間のクリアランスを計測する計測方法であって、
回転中の前記回転体へ前記ケーシングから照射した光の反射光の強度の計測データと、前記反射光に基づく前記ケーシングと前記回転体との間の距離の計測データとを取得するステップと、
前記反射光の強度の計測データに基づいて、取得された前記距離の計測データからスパイク状のノイズを除去するステップと、
ノイズ除去後の複数の前記距離の計測データを統計処理し、前記クリアランスの計測値を算出するステップと、
を有する計測方法。
【請求項10】
コンピュータに、
回転機械における回転体と前記回転体を囲むケーシングとの間のクリアランスを計測する計測処理であって、
回転中の前記回転体へ前記ケーシングから照射した光の反射光の強度の計測データと、前記反射光に基づく前記ケーシングと前記回転体との間の距離の計測データとを取得するステップと、
前記反射光の強度の計測データに基づいて、取得された前記距離の計測データからスパイク状のノイズを除去するステップと、
ノイズ除去後の複数の前記距離の計測データを統計処理し、前記クリアランスの計測値を算出するステップと、
を有する計測処理を実行させるプログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、計測装置、計測方法およびプログラムに関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
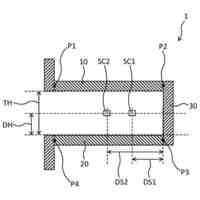
蒸気タービン、ガスタービン、圧縮機などの回転機械において、動翼の先端と動翼を囲むケーシングの内周面とのクリアランスは性能に影響する。その為、回転機械の組み立て時、試運転時、定期検査時などにクリアランスを計測して、適切な値かどうかを確認することが重要である。
【0003】
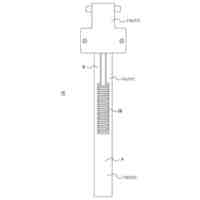
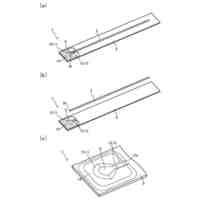
クリアランスの計測に関し、特許文献1には、ケーシングに形成された開口部から接触式のセンサを挿入して、センサの先端を動翼に押し当ててクリアランスを計測する方法が開示されている。特許文献1に記載の方法では、ロータを低速で回転させながら、センサを動翼へ接触させてクリアランスを計測するため、変形や損傷等の可能性がある。これに対し、特許文献2には、ケーシングに設置した光源から動翼へ光を照射し、その反射光を受光してクリアランスを計測するシステムが開示されている。特許文献2に記載の方法では、非接触でクリアランスを計測することができるため、翼やセンサの損傷を防ぐことができるが、反射光に含まれるノイズの扱いを適切に行わなければ、計測精度の低下を招いてしまう。なお、特許文献3には、クリアランスを計測するセンサを、ケーシングの外部から抜き差し可能に取り付けることを可能とするセンサの設置構造が開示されている。この設置構造によれば、ケーシングの開放や分解の必要がなく、接触式、非接触式にかかわらず、クリアランス計測用のセンサの設置および取り外しが可能となる。
【先行技術文献】
【特許文献】
【0004】
特許第5984648号公報
特許第6959027号公報
特許第4476116号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
非接触で精度よく、動翼とケーシングのクリアランスを計測することができる方法が求められている。
【0006】
本開示は、上記課題を解決することができる計測装置、計測方法およびプログラムを提供する。
【課題を解決するための手段】
【0007】
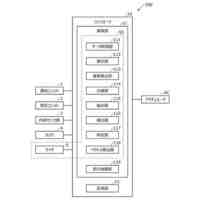
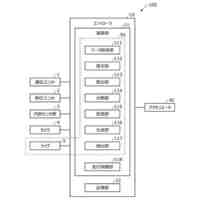
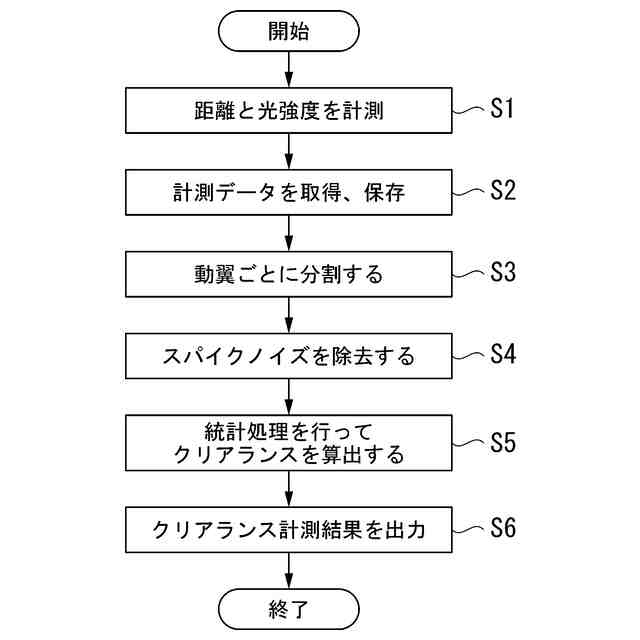
本開示の計測装置は、回転機械における回転体と前記回転体を囲むケーシングとの間のクリアランスを計測する計測装置であって、回転中の前記回転体へ前記ケーシングから照射した光の反射光の強度の計測データと、前記反射光に基づく前記ケーシングと前記回転体との間の距離の計測データを取得する手段と、前記反射光の強度の計測データに基づいて、取得された前記距離の計測データからスパイク状のノイズを除去する手段と、ノイズ除去後の複数の前記距離の計測データを統計処理し、前記クリアランスの計測値を算出する手段と、を備える。
【0008】
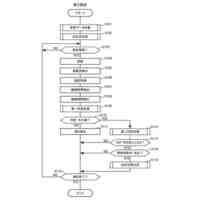
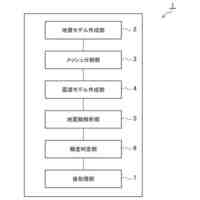
本開示の計測方法は、回転機械における回転体と前記回転体を囲むケーシングとの間のクリアランスを計測する計測方法であって、回転中の前記回転体へ前記ケーシングから照射した光の反射光の強度の計測データと、前記反射光に基づく前記ケーシングと前記回転体との間の距離の計測データを取得するステップと、前記反射光の強度の計測データに基づいて、取得された前記距離の計測データからスパイク状のノイズを除去するステップと、ノイズ除去後の複数の前記距離の計測データを統計処理し、前記クリアランスの計測値を算出するステップと、を有する。
【0009】
また、本開示のプログラムは、コンピュータに、回転機械における回転体と前記回転体を囲むケーシングとの間のクリアランスを計測する計測処理であって、回転中の前記回転体へ前記ケーシングから照射した光の反射光の強度の計測データと、前記反射光に基づく前記ケーシングと前記回転体との間の距離の計測データを取得するステップと、前記反射光の強度の計測データに基づいて、取得された前記距離の計測データからスパイク状のノイズを除去するステップと、ノイズ除去後の複数の前記距離の計測データを統計処理し、前記クリアランスの計測値を算出するステップと、を有する計測処理を実行させる。
【発明の効果】
【0010】
上述の計測装置、計測方法およびプログラムによれば、非接触で精度よく、回転機械における動翼などの回転体の先端部と、回転体を収容するケーシングとのクリアランスを計測することができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
三菱重工業株式会社
燃料合成システム、及び、燃料合成方法
今日
個人
通電検査装置
6日前
日本精機株式会社
位置検出装置
2日前
株式会社ハシマ
検針機
5日前
東レ株式会社
シート状物の検査方法
今日
東ソー株式会社
自動分析装置及び方法
2日前
富士電機株式会社
エンコーダ
今日
DIC株式会社
測定装置
7日前
富士電機株式会社
放射線検出器
7日前
株式会社ヨコオ
シートコンタクタ
2日前
TDK株式会社
温度センサ
今日
本田技研工業株式会社
物体検出装置
5日前
本田技研工業株式会社
物体検出装置
5日前
ダイハツ工業株式会社
凹部の深さ測定方法
5日前
スタンレー電気株式会社
車両前方視認装置
5日前
矢崎総業株式会社
電流センサ
6日前
スタンレー電気株式会社
車両前方視認装置
5日前
株式会社テイエルブイ
厚さ測定装置及び厚さ測定方法
7日前
セイコーエプソン株式会社
干渉計
2日前
JRCモビリティ株式会社
充電用温度判定回路
2日前
内山工業株式会社
分析装置用部材
1日前
日本信号株式会社
表示装置
今日
株式会社JVCケンウッド
撮像装置及び測距方法
5日前
TDK株式会社
センサ
今日
日東建設株式会社
ボルト・ナットの健全性検査装置
5日前
浜松ホトニクス株式会社
分光計測装置
6日前
セイコーエプソン株式会社
電子デバイス
6日前
株式会社SUBARU
蓄電池の状態センサ装置
2日前
株式会社ケー・エフ・シー
モルタル流動性試験システム
5日前
株式会社キーエンス
レベル計
5日前
株式会社キーエンス
レベル計
5日前
大成建設株式会社
地震動解析システム
今日
国立大学法人 東京大学
粘性の測定装置及び方法
1日前
株式会社キーエンス
レベル計
5日前
株式会社キーエンス
レベル計
5日前
個人
位置決め具及び位置決め具付きコンベックスルール
5日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ