TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024170031
公報種別
公開特許公報(A)
公開日
2024-12-06
出願番号
2023086949
出願日
2023-05-26
発明の名称
実装装置及び実装方法
出願人
三星電子株式会社
,
Samsung Electronics Co.,Ltd.
代理人
IBC一番町弁理士法人
,
個人
主分類
H01L
21/60 20060101AFI20241129BHJP(基本的電気素子)
要約
【課題】高精度な実装を実現することができる実装装置及び実装方法を提供する。
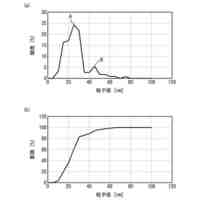
【解決手段】実施形態に係る実装装置1は、被接合物Maの上面に形成されたアライメントマーク80を含む領域を撮像した画像から、アライメントマーク80に対応した高輝度領域86H、及び、高輝度領域86Hの両側に位置する複数の低輝度領域86Lを含むROI82のx軸方向に沿った輝度プロファイルを取得するプロファイル取得部91と、輝度プロファイルに対して、変曲点及び曲率を有するシグモイド関数を含むフィッティング関数をフィッティングさせ、変曲点からアライメントマーク80のエッジ位置81L及びエッジ位置81Rを検出するフィッティング部92と、検出されたエッジ位置81L及びエッジ位置81Rに基づいて、アライメントマークの中心位置を算出する位置算出部と、中心位置を用いて被接合物Maに被接合物Mbを接合する接合部と、を備える。
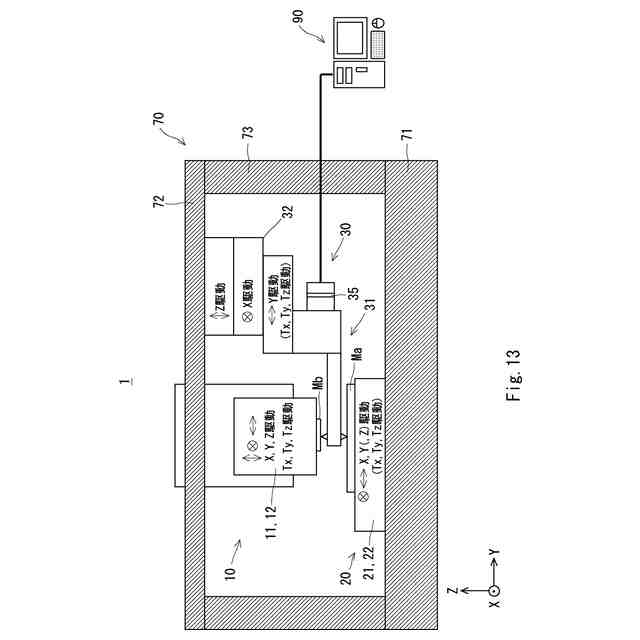
【選択図】図13
特許請求の範囲
【請求項1】
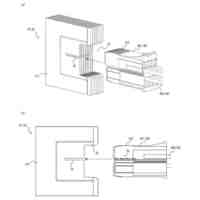
被接合物に形成されたアライメントマークを含む領域を撮像した画像から、前記画像における一方向に沿って並んだ第1領域、第2領域及び第3領域を含む着目領域の前記一方向に沿った輝度プロファイルを取得するプロファイル取得部と、
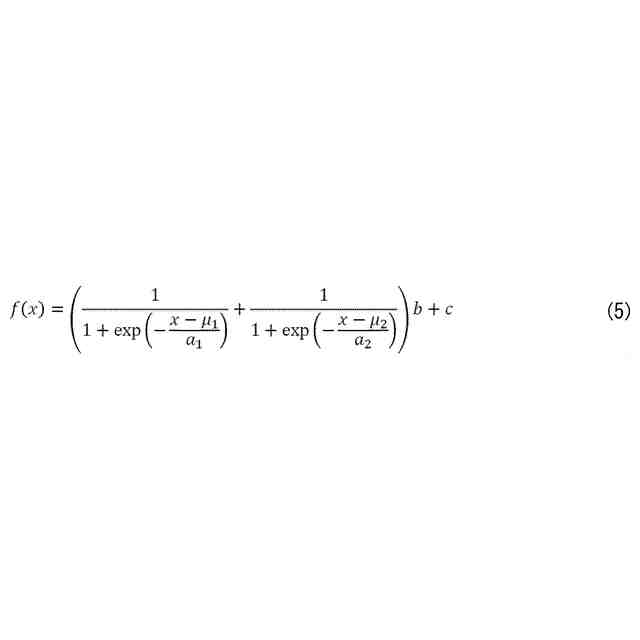
前記輝度プロファイルに対して、変曲点及び曲率を有するシグモイド関数を含むフィッティング関数をフィッティングさせ、前記変曲点から前記アライメントマークのエッジ位置を検出するフィッティング部と、
検出された前記エッジ位置を用いて前記被接合物に他の被接合物を接合する接合部と、
を備え、
前記第2領域は、前記アライメントマークに対応し、
前記第1領域及び前記第3領域と、前記第2領域とは、輝度の高低差を有し、
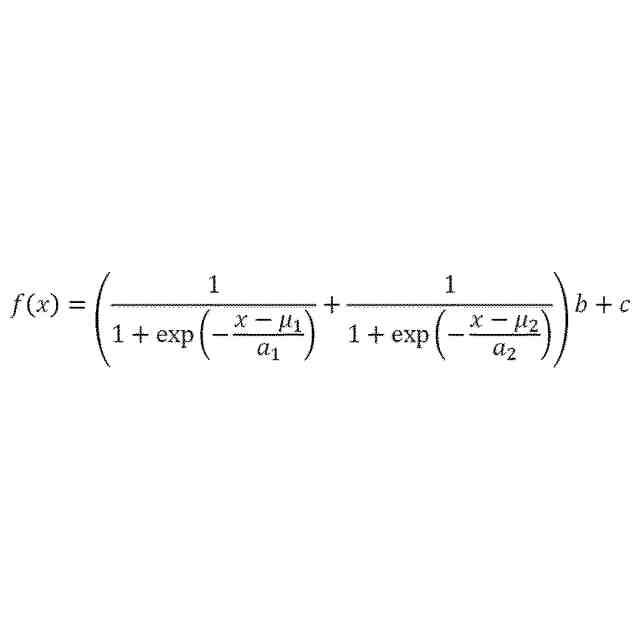
前記フィッティング関数は、
TIFF
2024170031000012.tif
17
105
であり、
μ
1
及びμ
2
は、前記変曲点を示し、
a
1
及びa
2
は、前記曲率を示し、
b及びcは、定数を示す、
実装装置。
続きを表示(約 2,000 文字)
【請求項2】
検出された前記エッジ位置に基づいて、前記アライメントマークの中心位置を算出する位置算出部をさらに備えた、
請求項1に記載の実装装置。
【請求項3】
前記第2領域は、前記一方向及び前記一方向に交差する他方向に沿った辺を有する四角形状であり、
前記位置算出部は、前記一方向において検出された前記エッジ位置に基づいて、前記アライメントマークの前記一方向における第1中心位置を算出し、前記他方向において検出された前記エッジ位置に基づいて、前記アライメントマークの前記他方向における第2中心位置を算出する、
請求項2に記載の実装装置。
【請求項4】
前記プロファイル取得部は、前記輝度プロファイルと前記フィッティング関数との誤差が所定値以下であること、及び、前記エッジ位置を検出するための計算時間が所定時間以下であること、の少なくともいずれかを満たす最大範囲の前記着目領域の前記輝度プロファイルを取得する、
請求項1に記載の実装装置。
【請求項5】
前記画像は、前記第2領域の周囲に、前記第1領域及び前記第3領域よりも高輝度もしくは低輝度の第4領域であって、別のマークに対応した前記第4領域を有し、
前記着目領域が前記第4領域を含む場合に、前記輝度プロファイルと前記フィッティング関数との誤差は所定値よりも大きくなる、
請求項4に記載の実装装置。
【請求項6】
前記着目領域は、前記第1領域と一方の前記第2領域との間の前記アライメントマークのエッジを有する第1エッジ部分、及び、前記第1領域と他方の前記第2領域との間の前記エッジを有する第2エッジ部分を含み、
前記フィッティング関数は、前記第1エッジ部分の前記変曲点及び前記曲率を有する第1シグモイド関数と、前記第2エッジ部分の前記変曲点及び前記曲率を有する第2シグモイド関数と、を含む、
請求項1に記載の実装装置。
【請求項7】
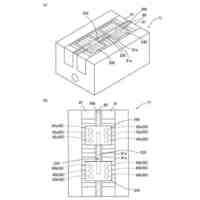
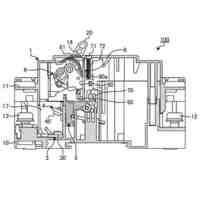
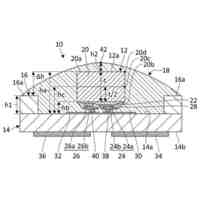
前記被接合物を保持するボンディングヘッドと、
前記被接合物と接合させる他の被接合物を保持するボンディングステージと、
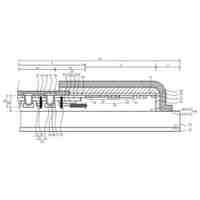
前記被接合物と前記他の被接合物との間に挿入され、前記被接合物及び前記他の被接合物を撮影する上下2視野光学系と、
をさらに備え、
前記被接合物の前記アライメントマークを第1アライメントマークとし、前記他の被接合物の前記アライメントマークを第2アライメントマークとした場合に、
前記上下2視野光学系は、前記第1アライメントマーク及び前記第2アライメントマークを撮像した画像を取得する1つのイメージセンサを有する、
請求項1に記載の実装装置。
【請求項8】
被接合物に形成されたアライメントマークを含む領域を撮像した画像から、前記画像における一方向に沿って並んだ第1領域、第2領域及び第3領域を含む着目領域の前記一方向に沿った輝度プロファイルを取得するステップと、
前記輝度プロファイルに対して、変曲点及び曲率を有するシグモイド関数を含むフィッティング関数をフィッティングさせ、前記変曲点から前記アライメントマークのエッジ位置を検出するステップと、
検出された前記エッジ位置を用いて、前記被接合物に他の被接合物を接合するステップと、
を備え、
前記第2領域は、前記アライメントマークに対応し、
前記第1領域及び前記第3領域と、前記第2領域とは、輝度の高低差を有し、
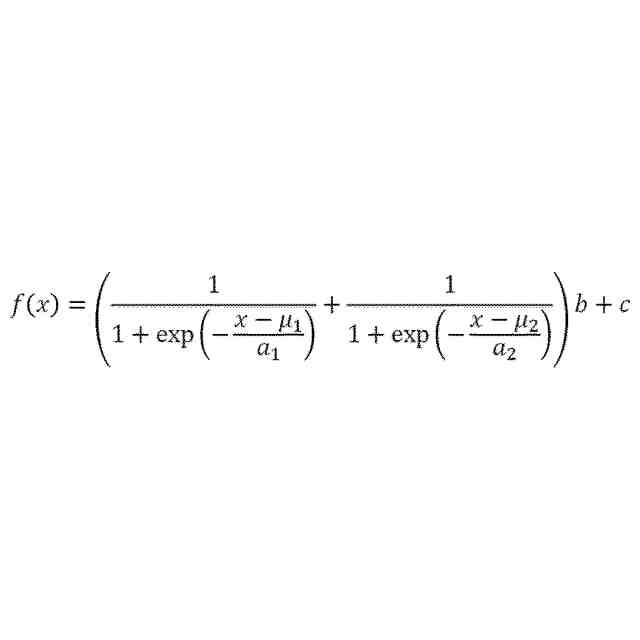
前記フィッティング関数は、
TIFF
2024170031000013.tif
17
105
であり、
μ
1
及びμ
2
は、前記変曲点を示し、
a
1
及びa
2
は、前記曲率を示し、
b及びcは、定数を示す、
実装方法。
【請求項9】
検出された前記エッジ位置に基づいて、前記アライメントマークの中心位置を算出するステップをさらに備えた、
請求項8に記載の実装方法。
【請求項10】
前記第2領域は、前記一方向及び前記一方向に交差する他方向に沿った辺を有する四角形状であり、
前記アライメントマークの中心位置を算出するステップにおいて、
前記一方向において検出された前記エッジ位置に基づいて、前記アライメントマークの前記一方向における第1中心位置を算出し、前記他方向において検出された前記エッジ位置に基づいて、前記アライメントマークの前記他方向における第2中心位置を算出する、
請求項9に記載の実装方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、実装装置及び実装方法に関する。
続きを表示(約 2,400 文字)
【背景技術】
【0002】
低消費電力及び高駆動速度を達成するために、半導体デバイス(Device)の多層化が進んでいる。CoC(Chip on Chip)及びCoW(Chip on Wafer)といった半導体チップ(Chip)の積層工程、あるいは、半導体パッケージ(Package)を実装する工程であるチップボンディング(Chip Bonding)工程は、従来のワイヤーボンディング(Wire Bonding)を介した接点間連結方式から、フリップチップ(Flip Chip)、あるいは、シリコン貫通電極(TSV)による連結方式に変化している。既存のワイヤーボンディングを介した接点間連結方式は、数10μmのボンディング(Bonding)精度でも十分であった。しかしながら、バンプ(Bump)とパッド(Pad)との直接接触が行われるフリップチップは、数μmの精度を要求される。特に、シリコン貫通電極によるチップのボンディングにおいては、サブμmの精度を要求される。
【0003】
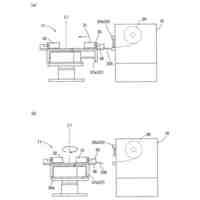
ボンディング工程において、上下2視野光学系を用いることにより、アライメントマーク(Alignment Mark)を認識する方法がある(例えば、特許文献3)。具体的には、ボンディングステージ(Bonding Stage)に保持された下側被接合物と、ボンディングヘッド(Bonding Head)に保持された上側被接合物との間に上下2視野光学系が挿入される。そして、上下2視野光学系は、下側被接合物の接合面上及び上側被接合物の接合面上にあるアライメントマークを認識する。上下2視野光学系は、上側を認識するためのカメラ(Camera)と下側を認識するためのカメラが一体となったものである。上下2視野光学系は、接合直前の下側被接合物と上側被接合物との隙間に横から侵入できるように、少なくとも水平面内に駆動軸を持つ。そして、認識結果を基に、被接合物の位置合わせを行い、接合を行う。
【0004】
アライメントマークの位置を検出するために、アライメントマークのエッジ位置を検出することが行われている。エッジ位置を検出する方法として、例えば、特許文献1のエッジ位置検出装置は、パターンのエッジを含む領域の輝度プロファイルを取得し、エッジを示す傾斜部に対して高次の近似式を当てはめてエッジ位置を検出する。
【0005】
また、特許文献2のエッジ位置検出装置は、基板上のパターン要素群を示す検査画像の輝度プロファイルを取得する。そして、エッジ位置検出装置は、交互に配置された4つの凹部と3つの凸部とを有する輝度プロファイルに対して、4つの凹部に対応する4つの釣鐘型関数と、3つの凸部に対応する3つの釣鐘型関数とを合成した左右対称なモデル関数を当てはめてエッジ位置を検出する。
【先行技術文献】
【特許文献】
【0006】
特許第5563942号公報
特許第6355487号公報
特許第5876000号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
ところで、画像の輝度には、ダークショットノイズ、読み取りノイズ、フォトンショットノイズ、といったカメラノイズが含まれている。そのため、例えば、同一の対象物を異なるタイミングで撮影した画像群に対して、特許文献1や特許文献2によりエッジ位置を求めると、カメラノイズによる輝度のばらつきの影響から関数フィッティングの結果が画像間で変化する場合がある。この場合には、同一対象物でも画像群で異なるエッジ位置が検出される。したがって、高精度な位置検出を求められる場面において再現性の低下を招くことになり好ましくない。よって、高精度な実装を実現することが困難になる。
【0008】
本開示は、このような課題を解決するためになされたものであり、ボンディング工程における被接合物間の位置合わせを高精度に行うために、フィッティング関数によるアライメントマークのエッジ位置の検出の再現性を向上させる。これにより、高精度な実装を実現することができる実装装置及び実装方法を提供する。
【課題を解決するための手段】
【0009】
一実施形態の実装装置は、被接合物に形成されたアライメントマークを含む領域を撮像した画像から、前記画像における一方向に沿って並んだ第1領域、第2領域及び第3領域を含む着目領域の前記一方向に沿った輝度プロファイルを取得するプロファイル取得部と、前記輝度プロファイルに対して、変曲点及び曲率を有するシグモイド関数を含むフィッティング関数をフィッティングさせ、前記変曲点から前記アライメントマークのエッジ位置を検出するフィッティング部と、検出された前記エッジ位置を用いて前記被接合物に他の被接合物を接合する接合部と、を備え、前記第2領域は、前記アライメントマークに対応し、前記第1領域及び前記第3領域と、前記第2領域とは、輝度の高低差を有し、
前記フィッティング関数は、
TIFF
2024170031000002.tif
17
105
であり、μ
1
及びμ
2
は、前記変曲点を示し、a
1
及びa
2
は、前記曲率を示し、b及びcは、定数を示す。
【0010】
上記実装装置では、検出された前記エッジ位置に基づいて、前記アライメントマークの中心位置を算出する位置算出部をさらに備えてもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
三星電子株式会社
半導体装置
13日前
三星電子株式会社
集積回路素子
13日前
三星電子株式会社
イメージセンサー
13日前
三星電子株式会社
集積回路素子及びその製造方法
14日前
個人
電波吸収体
22日前
東レ株式会社
二次電池
13日前
愛知電機株式会社
変圧器
20日前
電建株式会社
端子金具
27日前
SMK株式会社
コネクタ
27日前
太陽誘電株式会社
全固体電池
1日前
株式会社カネカ
接着加工装置
22日前
株式会社カネカ
接着加工装置
22日前
三菱電機株式会社
回路遮断器
27日前
株式会社水素パワー
接続構造
22日前
太陽誘電株式会社
全固体電池
22日前
富士電機株式会社
半導体装置
27日前
三菱電機株式会社
端子カバー
13日前
日本特殊陶業株式会社
保持装置
27日前
日機装株式会社
半導体発光装置
20日前
個人
電波散乱方向制御板
13日前
トヨタ自動車株式会社
二次電池
27日前
株式会社村田製作所
コイル部品
20日前
株式会社ダイヘン
搬送装置
27日前
日新イオン機器株式会社
イオン注入装置
15日前
株式会社島津製作所
X線撮影装置
27日前
日本電気株式会社
波長可変レーザ
26日前
住友電装株式会社
コネクタ
13日前
三洋化成工業株式会社
高分子固体電解質
22日前
トヨタ自動車株式会社
セルケース
27日前
三菱製紙株式会社
熱暴走抑制耐火シート
21日前
トヨタ自動車株式会社
短絡検知方法
27日前
株式会社カネカ
配線部材の加工装置
22日前
日本電気株式会社
半導体光増幅素子
26日前
ローム株式会社
信号伝達装置
27日前
トヨタ自動車株式会社
電池温調装置
13日前
富士電機株式会社
電磁接触器
20日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ