TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024167494
公報種別
公開特許公報(A)
公開日
2024-12-04
出願番号
2023083594
出願日
2023-05-22
発明の名称
PMモータの温度推定装置および温度推定方法
出願人
株式会社明電舎
代理人
個人
,
個人
,
個人
,
個人
主分類
H02P
21/14 20160101AFI20241127BHJP(電力の発電,変換,配電)
要約
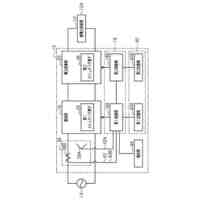
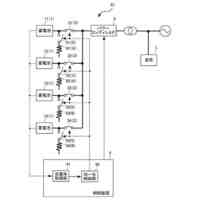
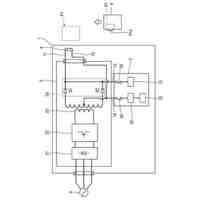
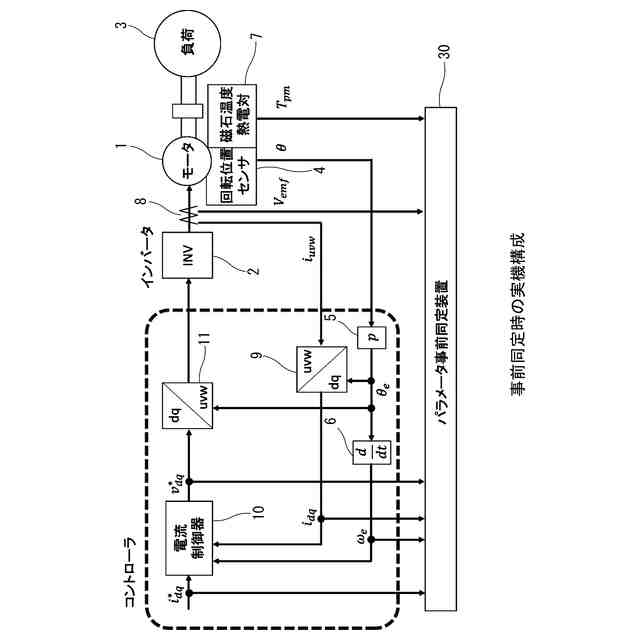
【課題】電流制御系を備えたインバータ2により駆動されるPMモータ1の磁石温度推定精度を向上させる。
【解決手段】電圧指令Vd
*
,Vq
*
、電気角速度ωe、d、q軸電流指令id
*
、iq
*
、d、q軸電流id、iq、PMモータの磁石温度を計測した磁石温度計測値Tpmに基づいて、モータパラメータである基準磁束Φn、温度係数β、d軸インダクタンスLd、抵抗Raを導出するパラメータ事前同定装置30と、前記Vd
*
,Vq
*
、ωe、id
*
、iq
*
、id、iq、Tpmと、前記モータパラメータΦn、β、Ld、Raに基づいて、q軸電圧誤差値ΔVqを算出する電圧誤差テーブル算出器と、電圧指令Vd
*
,Vq
*
、d、q軸電流id、iq、電気角速度ωeと、前記算出されたq軸電圧誤差値ΔVqに基づいて磁石温度推定値を求める磁石温度推定部と、を備えた。
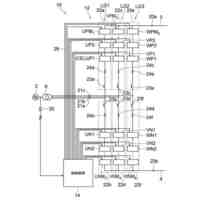
【選択図】 図1
特許請求の範囲
【請求項1】
電流制御系を備えたインバータにより駆動されるPMモータにおいて、
前記PMモータの検出電流をdq軸に座標変換したd軸電流id、q軸電流iqに基づいて、q軸電圧の、指令値と検出値の差であるq軸電圧誤差値ΔVqを算出するq軸電圧誤差算出部と、
PMモータに流れる電流を検出したモータ検出電流が電流指令と等しくなるように電流制御を行って得られた電圧指令Vd
*
,Vq
*
、前記d軸電流id、q軸電流iq、PMモータの回転数を検出して求めた電気角速度ωeと、前記q軸電圧誤差算出部で算出されたq軸電圧誤差値ΔVqに基づいて磁石温度推定値を求める磁石温度推定部と、を備えたことを特徴とするPMモータの温度推定装置。
続きを表示(約 3,800 文字)
【請求項2】
前記電圧指令Vd
*
,Vq
*
、電気角速度ωe、d軸電流指令id
*
、q軸電流指令iq
*
、d軸電流id、q軸電流iq、PMモータの磁石温度を計測した磁石温度計測値Tpmに基づいて、磁石温度の、推定値と計測値の誤差を最小化するモータパラメータである基準磁束Φn、温度係数β、d軸インダクタンスLd、抵抗Raを導出するパラメータ同定部を備え、
前記q軸電圧誤差算出部は、前記Vd
*
,Vq
*
、ωe、id
*
、iq
*
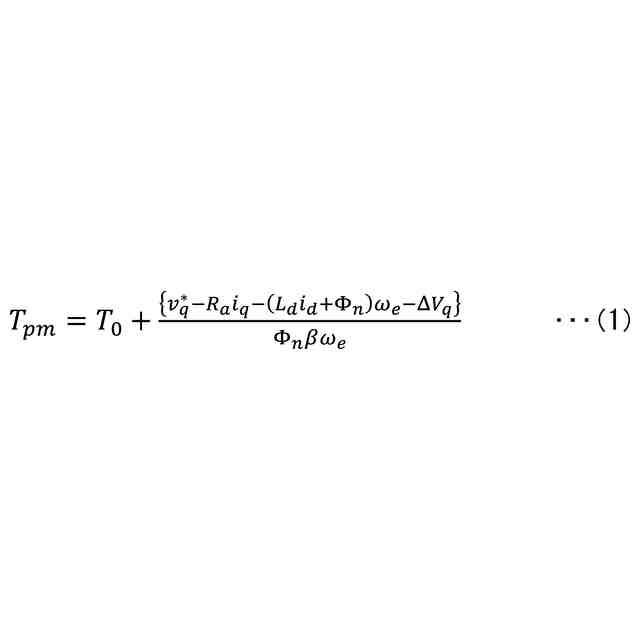
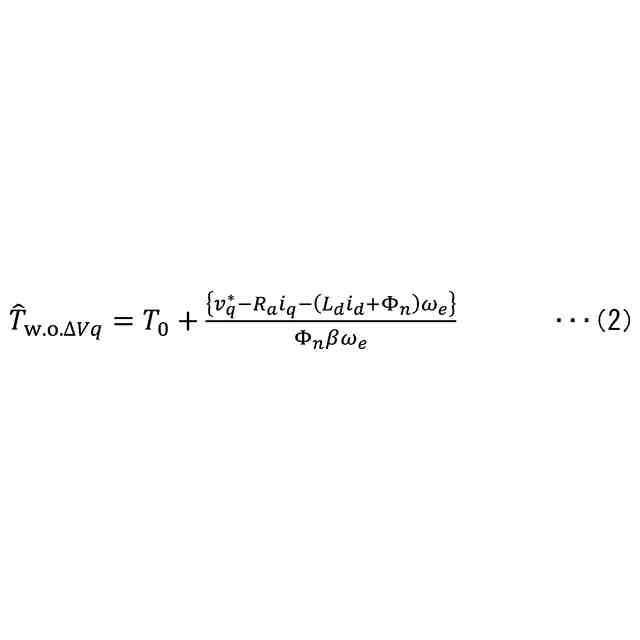
、id、iq、Tpmと、前記パラメータ同定部により導出されたモータパラメータΦn、β、Ld、Raに基づいて、(1)式、(2)式、(3)式を演算してq軸電圧誤差値ΔVqを算出する電圧誤差テーブル算出器を備え、
TIFF
2024167494000036.tif
50
166
TIFF
2024167494000037.tif
50
166
TIFF
2024167494000038.tif
50
166
(T^
W.0.ΔVq
は電圧誤差を考慮しない場合の磁石温度推定値、T
0
は基準温度、Tpmは磁石温度計測値)
前記磁石温度推定部は、試験データであるVd
*
,Vq
*
、id,iq、ωeと、前記パラメータ同定部により導出されたモータパラメータΦn、β、Ld、Raと、前記電圧誤差テーブル算出器により算出されたq軸電圧誤差値ΔVqに基づいて(4)式を演算して磁石温度推定値を求めることを特徴とする請求項1に記載のPMモータの温度推定装置。
TIFF
2024167494000039.tif
50
166
(T^は磁石温度推定値、T
0
は基準温度)
【請求項3】
前記q軸電圧誤差算出部は、前記Vd
*
,Vq
*
、ωe、id
*
、iq
*
、id、iq、Tpmと、PMモータの設計パラメータである基準磁束Φn、温度係数β、d軸インダクタンスLd、抵抗Raに基づいて、(1)式、(2)式、(3)式を演算してq軸電圧誤差値ΔVqを算出する電圧誤差テーブル算出器を備え、
TIFF
2024167494000040.tif
50
166
TIFF
2024167494000041.tif
50
166
TIFF
2024167494000042.tif
50
166
(T^
W.0.ΔVq
は電圧誤差を考慮しない場合の磁石温度推定値、T
0
は基準温度、Tpmは磁石温度計測値)
前記磁石温度推定部は、試験データであるVd
*
,Vq
*
、id,iq、ωeと、前記電圧誤差テーブル算出器により算出されたq軸電圧誤差値ΔVqに基づいて(4)式を演算して磁石温度推定値を求めることを特徴とする請求項1に記載のPMモータの温度推定装置。
TIFF
2024167494000043.tif
50
166
(T^は磁石温度推定値、T
0
は基準温度)
【請求項4】
前記q軸電圧誤差算出部は、電圧誤差テーブルの値をΔVq_
value
、fを曲面の関数、aを曲面の式のパラメータベクトルとしたときに、ΔVq_
value
-f(Id,Iq,a)が最小となる曲面の式のパラメータベクトルを導出する(17)式によって最適化問題を解き、
TIFF
2024167494000044.tif
50
166
(a
*
は最適化されたパラメータベクトル、argminは最小点の達する値の集合)
(17)式により導出されたパラメータベクトルを用いて曲面フィッティングの式を定型化し、実運転時のd軸電流Idとq軸電流Iqを(17)式に入力することでq軸電圧誤差値ΔVqを算出することを特徴とする請求項1に記載のPMモータの温度推定装置。
【請求項5】
前記パラメータ同定部は、前記PMモータの無負荷運転時に計測したPMモータの誘起電圧Vemfと、前記PMモータの回転数を検出して求めた電気角速度ωeの計測データを用いて磁束Φ(=Vemf/ωe)を算出し、
前記PMモータの磁石温度を計測した磁石温度計測値Tpmと前記算出された磁束Φの関係を表す最小二乗法の直線Φ=aTpm+b(aは直線の傾き、bは直線のy切片)と、磁束の温度変化を定義したΦ=Φn(1+β(Tpm-T0))(Φnは基準磁束、βは温度係数、T0は基準温度)とが対応するように前記Φnおよびβをモータパラメータとして同定し、
d軸電流指令値Idcmdおよびq軸電流指令値Iqcmdを各々0として前記PMモータの定速運転試験を行ったときの前記磁石温度推定部で推定された磁石温度推定値が、磁石温度計測値と近いときの運転速度を、妥当な温度推定がなされた速度領域であると決定し、
前記決定された速度領域でd軸電流指令値Idcmd<0、q軸電流指令値Iqcmd=0、又はIdcmd>0、Iqcmd=0とした定速運転試験を行い、Idcmdを段階的に変化させたときの各IdcmdにおけるVd
*
,Vq
*
、id、iq、ωe、Tpmの定常データを取得し、前記取得した定常データを基に、(9)式~(12)式に示す、磁石温度の計測値と推定値の二乗誤差が最小となるようなパラメータd軸インダクタンスLd、q軸電圧誤差ΔVqの組み合わせを求める評価式によって最適化問題を解いて、d軸インダクタンスLdを同定し、
TIFF
2024167494000045.tif
50
166
subject to
TIFF
2024167494000046.tif
50
166
TIFF
2024167494000047.tif
50
166
TIFF
2024167494000048.tif
50
166
(T^は磁石温度推定値、Ldnはd軸インダクタンス、ΔVqはq軸電圧指令値とq軸電圧検出値の差)
前記決定された、妥当な温度推定がなされた速度領域でd軸電流指令値Idcmd=0、q軸電流指令値Iqcmd>0、又はIdcmd=0、Iqcmd<0とした定速運転試験を行い、Iqcmdを段階的に変化させたときの各IqcmdにおけるVd
*
,Vq
*
、id、iq、ωe、Tpmの定常データを取得し、前記取得した定常データを基に、(13)式~(16)式に示す、磁石温度の計測値と推定値の二乗誤差が最小となるようなパラメータ抵抗Ran、q軸電圧誤差ΔVqの組み合わせを求める評価式によって最適化問題を解いて、Ranを同定することを特徴とする請求項2に記載のPMモータの温度推定装置。
TIFF
2024167494000049.tif
50
166
subject to
TIFF
2024167494000050.tif
50
166
TIFF
2024167494000051.tif
50
166
TIFF
2024167494000052.tif
50
166
(T^は磁石温度推定値、RanはPMモータの巻線抵抗、ΔVqはq軸電圧指令値とq軸電圧検出値の差)
【請求項6】
電流制御系を備えたインバータにより駆動されるPMモータの温度推定方法であって、
q軸電圧誤差算出部が、前記PMモータの検出電流をdq軸に座標変換したd軸電流id、q軸電流iqに基づいて、q軸電圧の、指令値と検出値の差であるq軸電圧誤差値ΔVqを算出するq軸電圧誤差算出ステップと、
磁石温度推定部が、試験データである、PMモータに流れる電流を検出したモータ検出電流が電流指令と等しくなるように電流制御を行って得られた電圧指令Vd
*
,Vq
*
、前記d軸電流id、q軸電流iq、PMモータの回転数を検出して求めた電気角速度ωeと、前記q軸電圧誤差算出部で算出されたq軸電圧誤差値ΔVqに基づいて磁石温度推定値を求める磁石温度推定ステップと、を備えたことを特徴とするPMモータの温度推定方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、PM(Permanent Magnet)モータを駆動するインバータにおいて、駆動中のPMモータの回転子磁石温度をインバータの計測データから推定する装置、方法に関する。
続きを表示(約 850 文字)
【背景技術】
【0002】
従来、PMモータの回転子磁石温度を推定する技術として例えば非特許文献1には、PMモータのdq軸電圧方程式を基にインバータの計測電流、電圧指令から磁石による鎖交磁束を推定し、推定した磁束の変化から磁石温度を推定する方式が記載されている。
【0003】
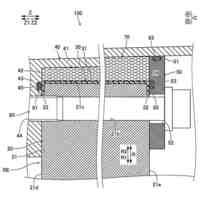
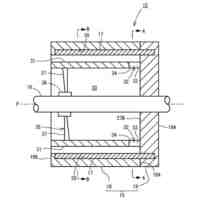
また特許文献1には、PMモータの誘起電圧から磁石温度を推定する方式が記載され、モータ駆動中の誘起電圧を計測するためにサーチコイルを埋めこみ、モータの印加電圧を計測する電圧センサも追加している。
【0004】
また特許文献2には、電圧外乱オブザーバを用いた磁石温度推定方式が記載され、特許文献3には外乱オブザーバとトルク計を用いた磁石温度推定方式が記載されている。
【先行技術文献】
【非特許文献】
【0005】
石原、他:「IPMSMの磁束シミュレータを用いた磁石温度推定」、令和4年電気学会全国大会、No.5-079
【特許文献】
【0006】
特開2021-118652号公報
特開2022-178400号公報
特許第7063406号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
非特許文献1の方式では、固定値のモータパラメータを使用しているため、モータパラメータの誤差の影響により磁石温度推定の誤差が生じ、磁石温度推定の精度が良くない。
【0008】
特許文献1の方式ではサーチコイルや電圧センサの追加が必要である。
【0009】
特許文献3の方式ではトルクセンサが必要である。
【0010】
本発明は、上記課題を解決するものであり、その目的は、磁石温度推定精度を向上させたPMモータの温度推定装置を提供することにある。
【課題を解決するための手段】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社明電舎
無人搬送車
16日前
株式会社明電舎
電力変換装置
16日前
株式会社明電舎
トランス構造、ゲート駆動回路
16日前
株式会社明電舎
車両冷却装置、車両冷却装置用ダクト
17日前
株式会社明電舎
監視装置、監視方法及び監視プログラム
24日前
個人
発電機
2日前
個人
ファスナー式コード束ね
17日前
個人
高電荷低電位電荷搬送体
16日前
株式会社豊田自動織機
回転電機
16日前
未来工業株式会社
ゲージ
16日前
株式会社アイシン
車両用駆動装置
10日前
株式会社豊田自動織機
回転電機のロータ
17日前
株式会社シマノ
電力供給装置
3日前
富士電機株式会社
半導体装置
2日前
株式会社ダイヘン
電力システム
4日前
トヨタ自動車株式会社
蓄電池制御装置
4日前
株式会社浅羽製作所
通線用先端誘導具
9日前
高周波熱錬株式会社
電源装置
17日前
高周波熱錬株式会社
電源装置
17日前
株式会社ダイヘン
蓄電池システム
9日前
日本航空電子工業株式会社
シール構造体
12日前
コーセル株式会社
スイッチング電源装置
16日前
ニデック株式会社
ステータ、モータ及びドローン
17日前
キヤノン株式会社
電源装置、画像形成装置
3日前
矢崎総業株式会社
グロメット
12日前
トヨタ自動車株式会社
充電制御装置
2日前
株式会社ミツバ
端子ユニット
16日前
GX株式会社
可搬式太陽光発電用電源装置
2日前
株式会社ミツバ
モータ制御装置
16日前
個人
同期回転電機
9日前
株式会社ミツバ
モータ制御装置
16日前
マツダ株式会社
モータ
4日前
株式会社ミツバ
モータ制御装置
16日前
シンフォニアテクノロジー株式会社
充電装置
3日前
本田技研工業株式会社
回転電機
16日前
株式会社TMEIC
電力変換装置
2日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ