TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024166968
公報種別
公開特許公報(A)
公開日
2024-11-29
出願番号
2023083418
出願日
2023-05-19
発明の名称
制御装置及び制御方法
出願人
ロベルト・ボッシュ・ゲゼルシャフト・ミト・ベシュレンクテル・ハフツング
,
ROBERT BOSCH GMBH
代理人
個人
,
個人
,
個人
主分類
B60W
30/14 20060101AFI20241122BHJP(車両一般)
要約
【課題】本発明は、鞍乗り型車両の安全性を向上させることができる制御装置及び制御方法を得るものである。
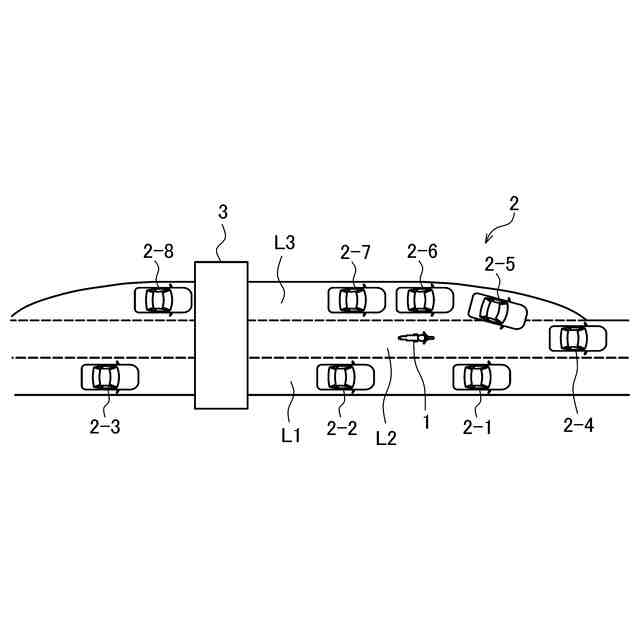
【解決手段】本発明に係る制御装置及び制御方法では、制御装置の実行部が、自車両(1)と、自車両(1)が走行するレーンである自車レーン(L2)を走行する先行車両(2-4)との位置関係が目標位置関係に近づくように、自車両(1)の速度を自動で制御する位置関係調整動作を実行し、実行部は、自車両(1)が加速している状態で位置関係調整動作が行われている状況下において、判定条件が満たされた場合に、先行車両(2-4)に対する自車両(1)の接近を抑制する接近抑制動作を実行し、判定条件は、自車レーン(L2)に対して隣接する隣接レーン(L3)に複数の他車両(2)が存在する、との第1条件を含む。
【選択図】図3
特許請求の範囲
【請求項1】
鞍乗り型車両(1)の挙動を制御する制御装置(20)であって、
自車両(1)と、前記自車両(1)が走行するレーンである自車レーン(L2)を走行する先行車両(2-4、2-12)との位置関係が目標位置関係に近づくように、前記自車両(1)の速度を自動で制御する位置関係調整動作を実行する実行部(22)を備え、
前記実行部(22)は、前記自車両(1)が加速している状態で前記位置関係調整動作が行われている状況下において、判定条件が満たされた場合に、前記先行車両(2-4、2-12)に対する前記自車両(1)の接近を抑制する接近抑制動作を実行し、
前記判定条件は、前記自車レーン(L2)に対して隣接する隣接レーン(L3)に複数の他車両(2)が存在する、との第1条件を含む、
制御装置。
続きを表示(約 1,000 文字)
【請求項2】
前記判定条件は、前記自車両(1)の速度状態情報が、前記自車両(1)の速度が第1基準速度より低いことを示す情報である、との第2条件をさらに含む、
請求項1に記載の制御装置。
【請求項3】
前記判定条件は、前記他車両(2)に対する前記自車両(1)の速度差状態情報が、前記他車両(2)に対する前記自車両(1)の速度差が第1基準速度差より小さいことを示す情報である、との第3条件をさらに含む、
請求項2に記載の制御装置。
【請求項4】
前記判定条件は、前記他車両(2)に対する前記自車両(1)の速度差状態情報が、前記他車両(2)に対する前記自車両(1)の速度差が第2基準速度差より大きいことを示す情報である、との第4条件をさらに含む、
請求項1に記載の制御装置。
【請求項5】
前記判定条件は、前記速度差状態情報が、前記速度差が前記第2基準速度差よりも大きい第3基準速度差より小さいことを示す情報である、との第5条件をさらに含む、
請求項4に記載の制御装置。
【請求項6】
前記判定条件は、前記自車両(1)の速度状態情報が、前記自車両(1)の速度が第2基準速度より高いことを示す情報である、との第6条件をさらに含む、
請求項4に記載の制御装置。
【請求項7】
前記判定条件は、前記他車両(2)の速度状態情報が、前記他車両(2)の速度が第3基準速度より低いことを示す情報である、との第7条件をさらに含む、
請求項1に記載の制御装置。
【請求項8】
前記接近抑制動作は、前記目標位置関係を、前記判定条件が満たされない場合と比べて、前記自車両(1)が前記先行車両(2-4、2-12)から遠ざかった位置関係にする動作である、
請求項1~7のいずれか一項に記載の制御装置。
【請求項9】
前記接近抑制動作は、前記自車両(1)に生じる加速度を、前記判定条件が満たされない場合よりも低くする動作である、
請求項1~7のいずれか一項に記載の制御装置。
【請求項10】
前記接近抑制動作は、前記自車両(1)に生じる加速度変化率を、前記判定条件が満たされない場合よりも低くする動作である、
請求項1~7のいずれか一項に記載の制御装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
この開示は、鞍乗り型車両の安全性を向上させることができる制御装置及び制御方法に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
従来、モータサイクル等の鞍乗り型車両のライダーによる運転を支援する種々の技術が提案されている。例えば、特許文献1では、走行方向又は実質的に走行方向にある障害物を検出するセンサ装置により検出された情報に基づいて、不適切に障害物に接近していることをモータサイクルのライダーへ警告する運転者支援システムが開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2009-116882号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、車両の運転を支援するための技術として、自車両と、自車両が走行するレーンである自車レーンを走行する先行車両との位置関係が目標位置関係に近づくように、自車両の速度を自動で制御する位置関係調整動作がある。そして、上記の位置関係調整動作を鞍乗り型車両に適用することが考えられる。ここで、鞍乗り型車両では、四輪の自動車等と比べて車体挙動が不安定であり機敏に変化しやすい。それにより、自車レーンに対して隣接する隣接レーンに存在する他車両の運転者は、加速中の自車両の位置を見誤りやすく、隣接レーンに存在する他車両による自車レーンへの車線変更が不意に行われる場合がある。ゆえに、位置関係調整動作によって鞍乗り型車両の速度が自動で制御されている状況下において、安全性を向上させることが特に望まれる。
【0005】
本発明は、上述の課題を背景としてなされたものであり、鞍乗り型車両の安全性を向上させることができる制御装置及び制御方法を得るものである。
【課題を解決するための手段】
【0006】
本発明に係る制御装置は、鞍乗り型車両の挙動を制御する制御装置であって、自車両と、前記自車両が走行するレーンである自車レーンを走行する先行車両との位置関係が目標位置関係に近づくように、前記自車両の速度を自動で制御する位置関係調整動作を実行する実行部を備え、前記実行部は、前記自車両が加速している状態で前記位置関係調整動作が行われている状況下において、判定条件が満たされた場合に、前記先行車両に対する前記自車両の接近を抑制する接近抑制動作を実行し、前記判定条件は、前記自車レーンに対して隣接する隣接レーンに複数の他車両が存在する、との第1条件を含む。
【0007】
本発明に係る制御方法は、鞍乗り型車両の挙動を制御する制御方法であって、制御装置の実行部が、自車両と、前記自車両が走行するレーンである自車レーンを走行する先行車両との位置関係が目標位置関係に近づくように、前記自車両の速度を自動で制御する位置関係調整動作を実行し、前記実行部は、前記自車両が加速している状態で前記位置関係調整動作が行われている状況下において、判定条件が満たされた場合に、前記先行車両に対する前記自車両の接近を抑制する接近抑制動作を実行し、前記判定条件は、前記自車レーンに対して隣接する隣接レーンに複数の他車両が存在する、との第1条件を含む。
【発明の効果】
【0008】
本発明に係る制御装置及び制御方法では、制御装置の実行部が、自車両と、自車両が走行するレーンである自車レーンを走行する先行車両との位置関係が目標位置関係に近づくように、自車両の速度を自動で制御する位置関係調整動作を実行し、実行部は、自車両が加速している状態で位置関係調整動作が行われている状況下において、判定条件が満たされた場合に、先行車両に対する自車両の接近を抑制する接近抑制動作を実行し、判定条件は、自車レーンに対して隣接する隣接レーンに複数の他車両が存在する、との第1条件を含む。それにより、隣接レーンに複数の他車両が存在する状況下、つまり、他車両による自車レーンへの車線変更が行われやすい状況下において、位置関係調整動作による加速走行がその車線変更によってライダーにとって不意に不安定になることが、接近抑制動作によって未然に抑制され得る。ゆえに、鞍乗り型車両の安全性が向上し得る。
【図面の簡単な説明】
【0009】
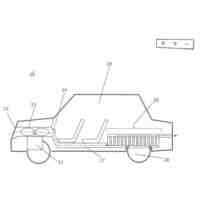
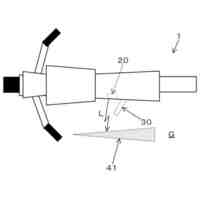
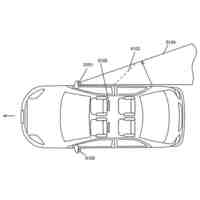
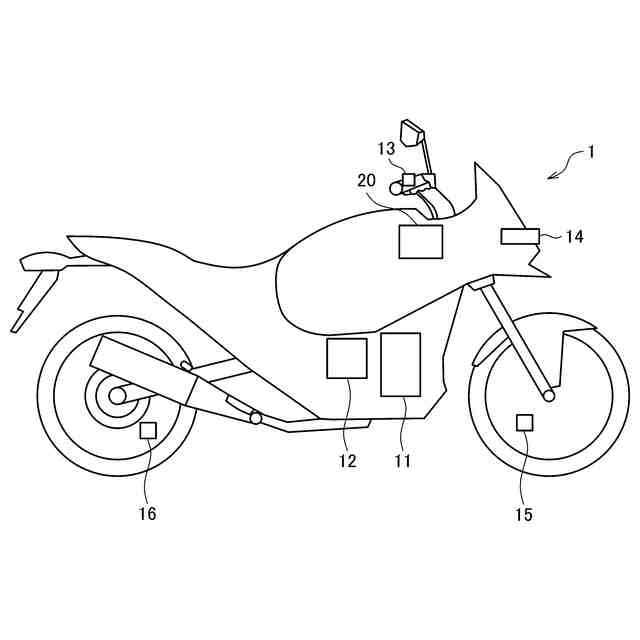
本発明の実施形態に係る鞍乗り型車両の概略構成を示す模式図である。
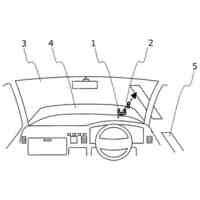
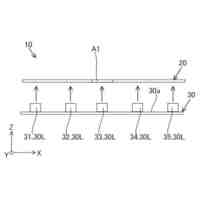
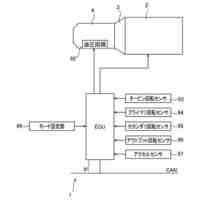
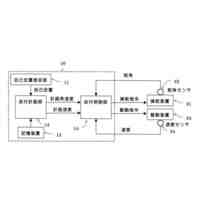
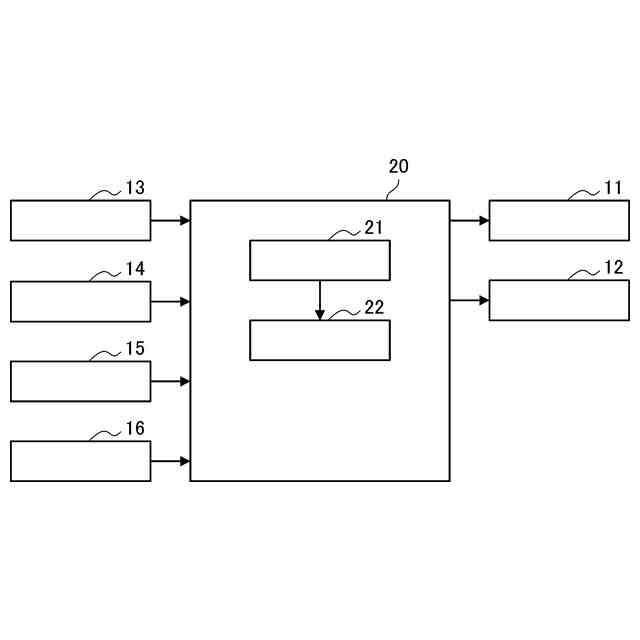
本発明の実施形態に係る制御装置の機能構成の一例を示すブロック図である。
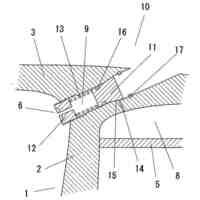
本発明の実施形態に係る鞍乗り型車両の周囲の交通状況の第1の例を示す図である。
本発明の実施形態に係る鞍乗り型車両の周囲の交通状況の第2の例を示す図である。
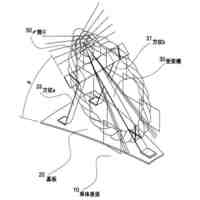
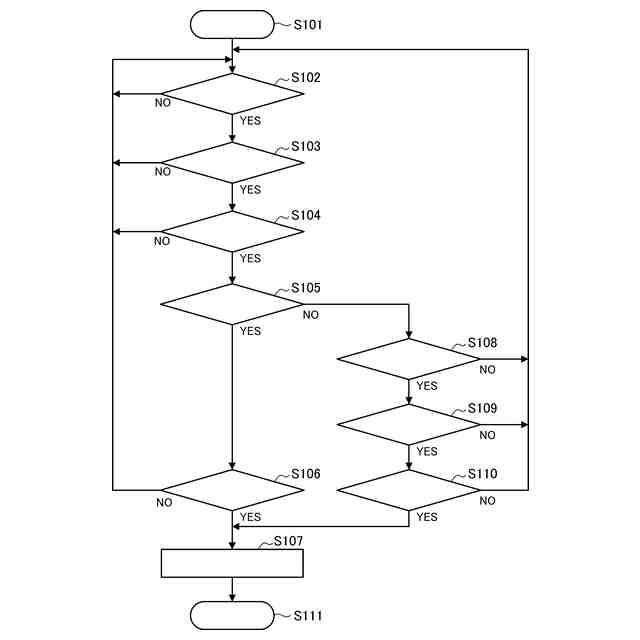
本発明の実施形態に係る制御装置が行う処理の流れの一例を示すフローチャートである。
【発明を実施するための形態】
【0010】
以下に、本発明に係る制御装置及び制御方法について、図面を用いて説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
車両
19日前
個人
自動車運転補助装置
12日前
個人
空気圧調節式ホイール。
2か月前
東レ株式会社
車両用エアバッグ
2か月前
個人
自動車外部装着用しめ飾り
12日前
日本精機株式会社
車載表示装置
11日前
日本精機株式会社
車外表示装置
1か月前
エムケー精工株式会社
洗車装置
1か月前
トヨタ自動車株式会社
車両
5日前
日本精機株式会社
車両用表示装置
1か月前
株式会社SUBARU
車両
1か月前
ダイハツ工業株式会社
車両
2か月前
日本精機株式会社
車両用表示装置
11日前
日本精機株式会社
車両用表示装置
1か月前
ダイハツ工業株式会社
車両
2か月前
日本精機株式会社
車両用表示装置
1か月前
日本精機株式会社
車両用表示装置
1か月前
日本精機株式会社
車両用表示装置
25日前
豊田合成株式会社
車両
2か月前
ダイハツ工業株式会社
バッグ
27日前
株式会社コーワ
フィルター清掃装置
1か月前
エムケー精工株式会社
車両処理装置
2か月前
日本化薬株式会社
ガス発生器
1か月前
豊田合成株式会社
車両
2か月前
日本精機株式会社
車両用撮影システム
25日前
株式会社FUTU-RE
車両制御装置
12日前
YKS特許評価株式会社
自動車
6日前
トヨタ自動車株式会社
搬送装置
6日前
豊田合成株式会社
乗員保護装置
1か月前
個人
ブレーキ踏み間違い救済システム
2か月前
株式会社アイシン
車高調整装置
27日前
豊田合成株式会社
乗員保護装置
2か月前
ダイハツ工業株式会社
搭載構造
2か月前
ダイハツ工業株式会社
搭載構造
2か月前
ダイハツ工業株式会社
車両構造
4日前
株式会社セイワ
ドリンクホルダー
1か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ