TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024166226
公報種別
公開特許公報(A)
公開日
2024-11-28
出願番号
2024152725,2022142895
出願日
2024-09-04,2017-11-13
発明の名称
プログラム及びシステム
出願人
小橋工業株式会社
代理人
弁理士法人高橋・林アンドパートナーズ
主分類
A01B
33/16 20060101AFI20241121BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】作業機に適した作業条件を容易に得ることができる作業機操作プログラムを提供すること。
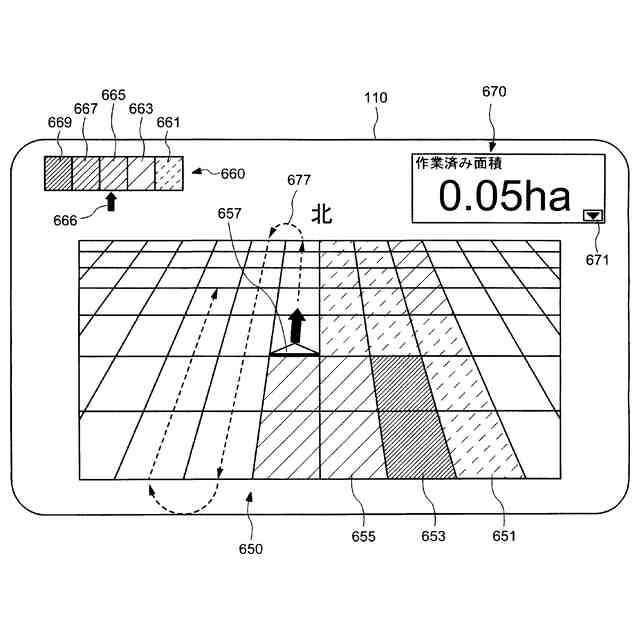
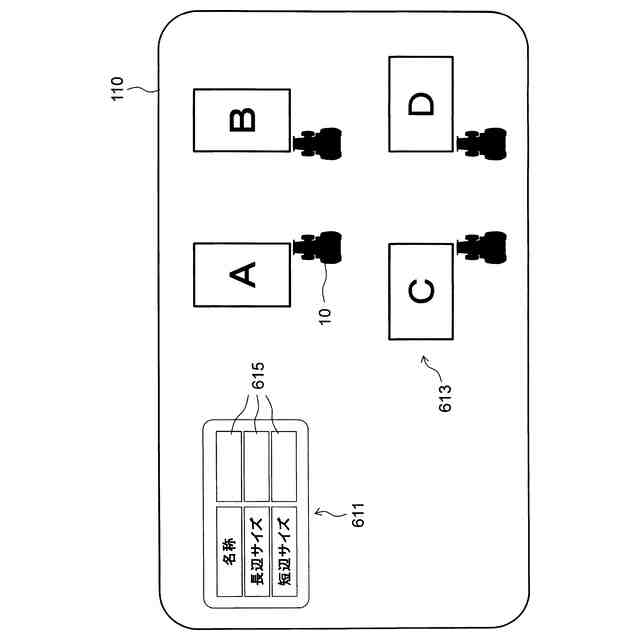
【解決手段】圃場を走行する作業機によって作業された、作業区間毎の圃場の状態を判定するブロック判定の結果を作業区間毎に表示する圃場の砕土状態又は均平状態の表示をコンピュータに実行させるためのプログラムは、ブロック判定の結果が表示される圃場マップとは異なる領域に、作業区間よりも短い区間の圃場の砕土状態又は均平状態を判定するリアルタイム判定の結果を表示し、ブロック判定の結果は、複数段階で目視により識別可能な模様又は色による表示態様で表示され、リアルタイム判定の結果は、複数段階で目視により識別可能な模様又は色による表示態様で表示され、ブロック判定の結果を示す各段階の表示態様を、リアルタイム判定の結果を示す複数段階のいずれかの表示態様と共通する表示態様で表示する。
【選択図】図12
特許請求の範囲
【請求項1】
圃場を走行する作業機によって作業された、作業区間毎の圃場の状態を判定するブロック判定の結果を前記作業区間毎に表示する圃場の砕土状態又は均平状態の表示をコンピュータに実行させるためのプログラムであって、
前記ブロック判定の結果が表示される圃場マップとは異なる領域に、前記作業区間よりも短い区間の圃場の砕土状態又は均平状態を判定するリアルタイム判定の結果を表示し、
前記ブロック判定の結果は、複数段階で目視により識別可能な模様又は色による表示態様で表示され、
前記リアルタイム判定の結果は、複数段階で目視により識別可能な模様又は色による表示態様で表示され、
前記ブロック判定の結果を示す各段階の表示態様を、前記リアルタイム判定の結果を示す前記複数段階のいずれかの表示態様と共通する表示態様で表示することをコンピュータに実行させるためのプログラム。
発明の詳細な説明
【技術分野】
【0001】
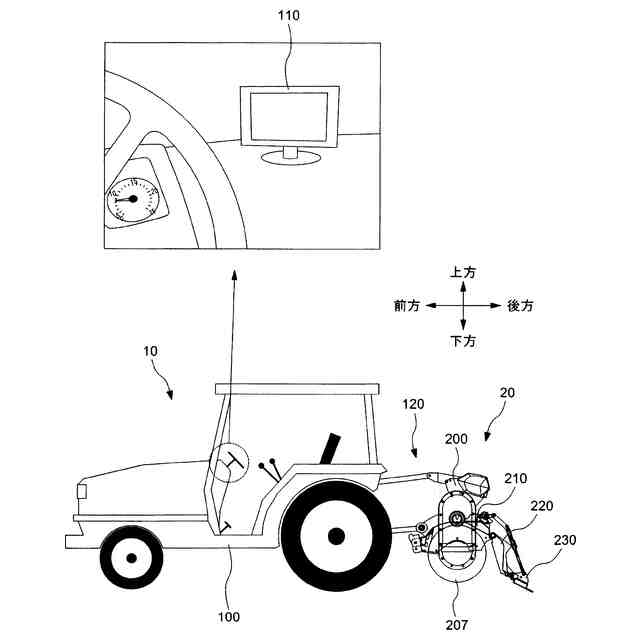
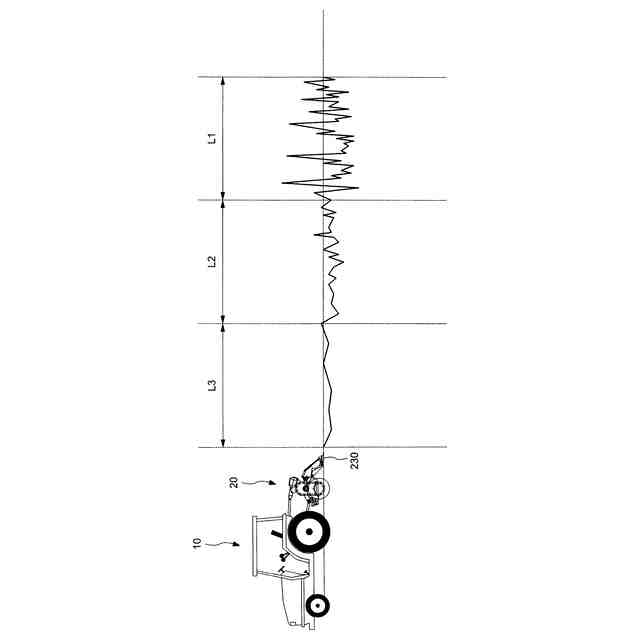
本発明は表示方法に関する。特に、トラクタの後部に装着される作業機に設けられた接地部材の上下動の変化に基づいて判定された圃場の圃場状態の表示方法に関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
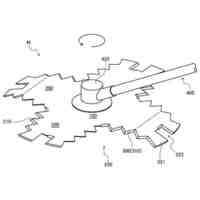
現在、農作業の労働時間を軽減するために作業機のオートマチック化が進められ、様々な作業機が開発されている。特に、トラクタ等の走行機体の後方に装着され、耕耘や代かきなど、作業の種類に応じて交換可能な作業機(耕耘機や代かき機)は、トラクタ等の走行機体に対してアタッチメントのように交換するだけで様々な農作業に対応することが可能であり、農作業のコスト低減に大きく寄与している。
【0003】
また、従来の農作業は各農家の経験と勘に頼っていた。したがって、各農家によって農作業の効率にばらつきが生じていたため、農作物の収穫量および品質にもばらつきが生じていた。さらに、各農家が世代交代すると、新たな世代を担う農家は、その経験と勘のすべてを引き継ぐことは困難であり、農作業の経験の蓄積が活かされない。
【0004】
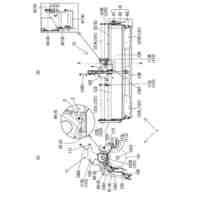
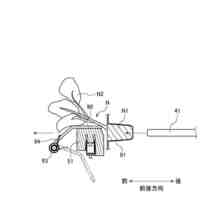
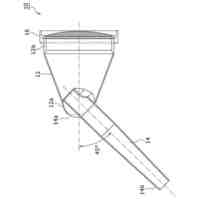
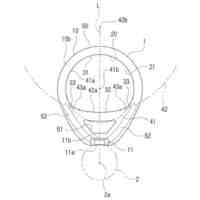
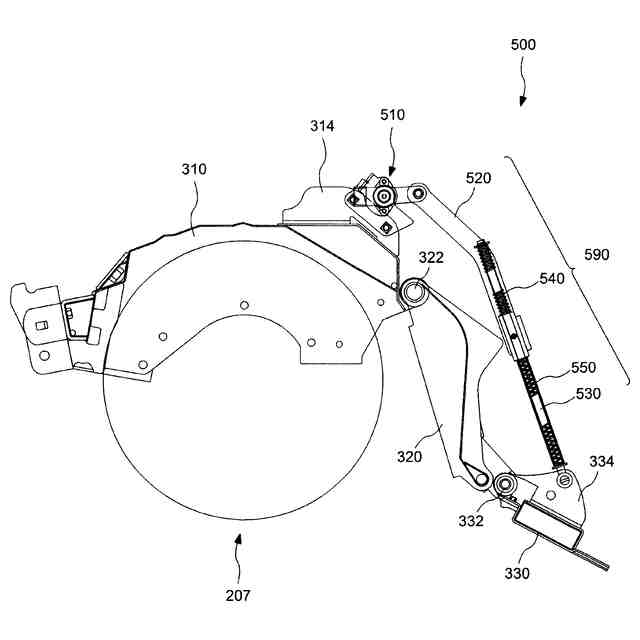
耕耘機や代かき機によって圃場に対して耕耘又は代かきの作業を行う場合、耕耘後又は代かき後の均平状態や土塊の大きさを把握する必要がある。しかし、圃場全ての均平状態や土塊の大きさを確認することはできないため、圃場の限られた領域だけの情報しか得ることができない。そのため、作業者は作業中の作業機に伝わる振動や作業後の圃場状態の目視によって均平状態や土塊の大きさを推測していた。耕耘後又は代かき後の圃場の圃場状態を評価する方法として、リヤカバー21の回動基部に角度センサー22を配置し、リヤカバー21の回動によって耕深を検知する手法が用いられている(例えば、特許文献1)。
【先行技術文献】
【特許文献】
【0005】
特開平9-28109号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、特許文献1に開示された構造では、詳細な圃場の均平状態や土塊の大きさを評価することができない。さらに、特許文献1に開示された構造の作業機では、圃場全体の圃場状態を管理することはできず、圃場の各位置における圃場状態は作業者の記憶に頼っていた。本発明は、そのような課題に鑑みてなされたものであり、圃場を作業しながらその作業の結果得られた圃場状態を作業者が容易に視認できるように表示することを目的とする。
【課題を解決するための手段】
【0007】
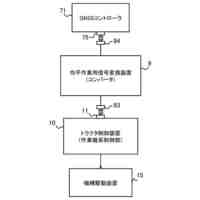
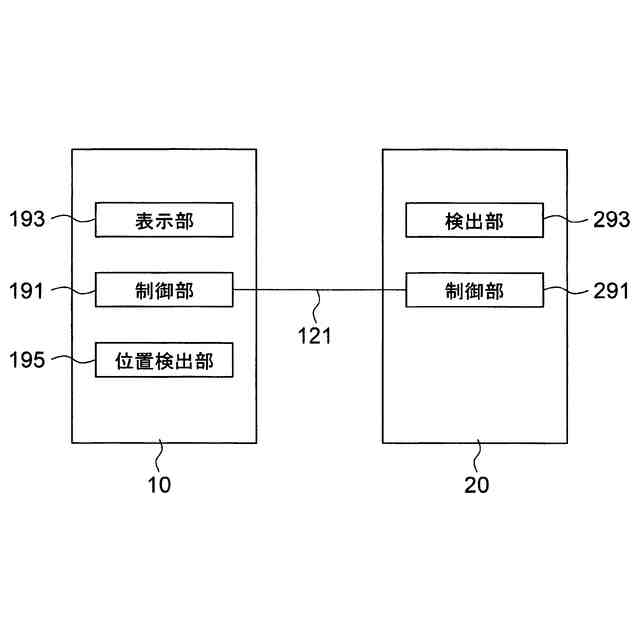
本発明の一実施形態による表示方法は、圃場を走行する作業機の作業経路と、前記作業機によって作業された圃場の状態を判定した判定結果と、を同一画面に表示する。
【0008】
前記判定結果は、前記作業経路に沿って表示されてもよい。
【0009】
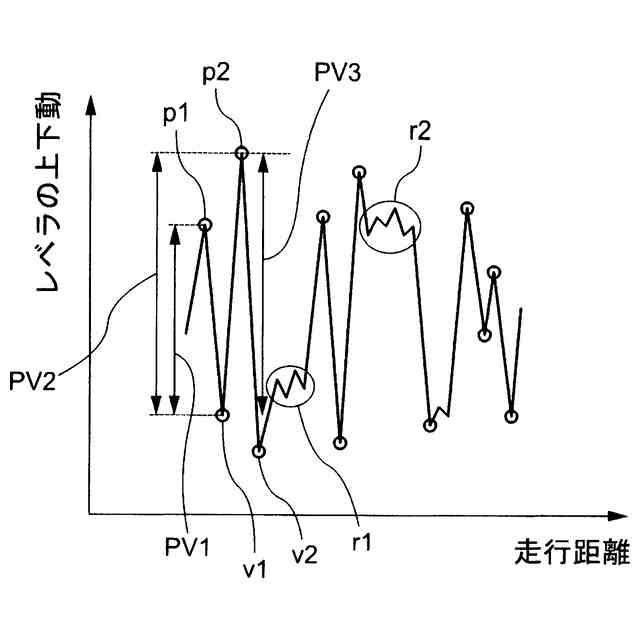
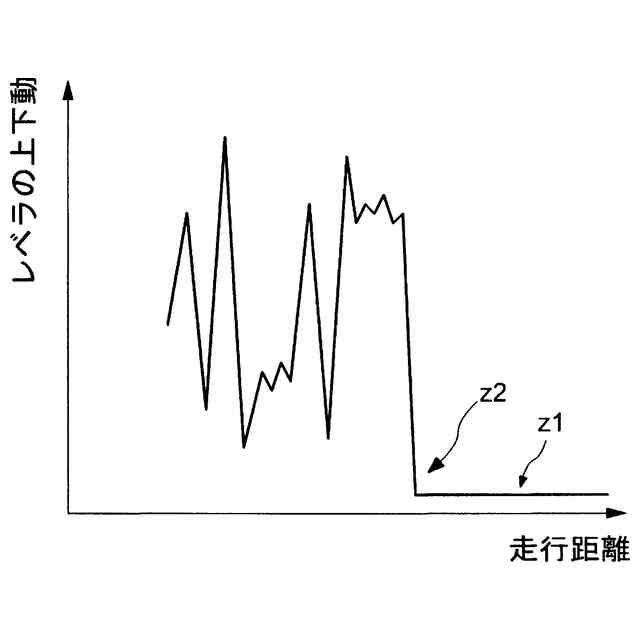
前記判定結果は、前記作業機に備えられた前記圃場に接する接地部材の前記圃場に対する上下動の変化に基づいて判定されてもよい。
【0010】
前記作業経路は、過去の前記判定結果に基づいて決定されてもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
小橋工業株式会社
農作業機
今日
小橋工業株式会社
農作業機
1か月前
小橋工業株式会社
情報処理装置、作業機、及びプログラム
1か月前
井関農機株式会社
作業車両
6日前
井関農機株式会社
作業車両
28日前
個人
陰樹の栽培方法
今日
個人
ウキ連結開閉式遠投かご
今日
井関農機株式会社
コンバイン
6日前
個人
回転式草刈刃
今日
井関農機株式会社
作業車両
6日前
松山株式会社
収穫機
27日前
みのる産業株式会社
移植機
24日前
井関農機株式会社
作業車両
6日前
みのる産業株式会社
移植機
24日前
株式会社大貴
動物用トイレ
27日前
個人
害獣生体捕獲狭域収容システム
10日前
個人
均平作業用信号変換装置
7日前
井関農機株式会社
コンバイン
6日前
株式会社アトレス
散水ノズル
今日
株式会社竹中工務店
プランター
21日前
個人
マルチシート等の敷設器具
6日前
三菱マヒンドラ農機株式会社
作業車両
28日前
三菱マヒンドラ農機株式会社
作業車両
27日前
キユーピー株式会社
含水流動状組成物
20日前
株式会社クボタ
収穫機
21日前
株式会社クボタ
作業機
7日前
株式会社大阪製薬
薬剤揮散具
20日前
株式会社シマノ
釣糸ガイド及び釣竿
6日前
グローブライド株式会社
釣竿
1日前
グローブライド株式会社
釣竿
1日前
株式会社クボタ
作業車
20日前
株式会社クボタ
収穫機
21日前
株式会社クボタ
農作業車
今日
個人
栽培ハウス
今日
株式会社シマノ
釣竿
今日
みのる産業株式会社
苗箱および移植装置
24日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ