TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024166098
公報種別
公開特許公報(A)
公開日
2024-11-28
出願番号
2024071954
出願日
2024-04-25
発明の名称
等ピッチ矩形押えばねの螺旋角度測定装置及び方法
出願人
杭州電子科技大学
,
Hangzhou Dianzi University
代理人
弁理士法人ATEN
主分類
G01B
21/22 20060101AFI20241121BHJP(測定;試験)
要約
【課題】等ピッチ矩形押えばねの螺旋角度測定装置及び方法を開示する。
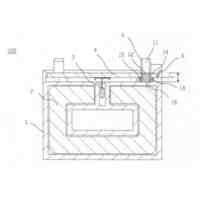
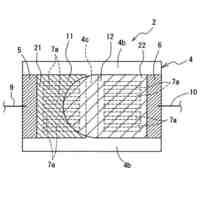
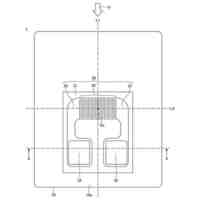
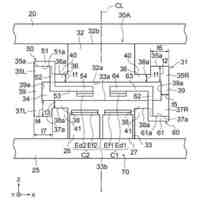
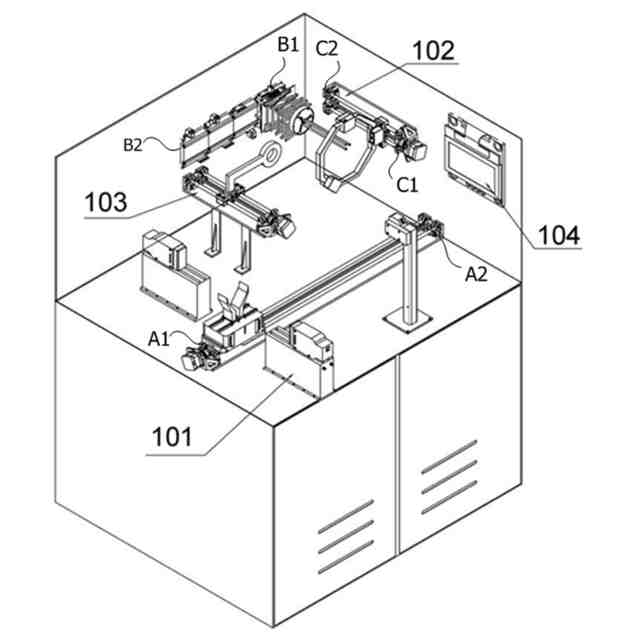
【解決手段】中径測定機構101と、コイル数測定機構102と、高さ測定機構103とを備えた等ピッチ矩形押えばねの螺旋角度測定装置であって、被検出ばねの外径、内径、総コイル数、自由長さ、圧縮長さの検出を、中径測定機構101、コイル数測定機構102、高さ測定機構103により実現し、ばねの螺旋角度の算出にデータを提供し、さらに、ばねの螺旋角度の大きさの良否を判断するための根拠を提供する。
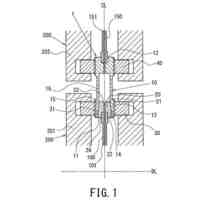
【選択図】図1
特許請求の範囲
【請求項1】
等ピッチ矩形押えばねの螺旋角度測定装置であって、
ラックと、中径測定機構と、コイル数測定機構と、高さ測定機構とを備えており、
前記中径測定機構は、光カーテンマイクロメータと、第1直線スライド台モジュールと、支持爪群とを含み、前記第1直線スライド台モジュールは、前記ラック上に配置され、間隔をあけて配置された逆八の字形をした2つの支持爪を含む支持爪群を並進駆動させ、前記光カーテンマイクロメータの出射端と受信端はいずれも前記ラックに固定され、それぞれ前記第1直線スライド台モジュールの両側に位置しており、初期状態では、支持爪群は前記第1直線スライド台モジュールの前記光カーテンマイクロメータ側に近い端部に位置し、支持爪群の2つの支持爪は、前記出射端から出射される垂直光カーテンに対して対称に配置されており、
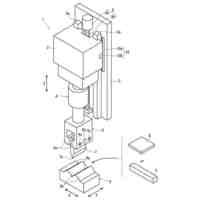
前記コイル数測定機構は、レーザ走査アセンブリと、内支持クランプと、電動伸縮フレームと、水平移動機構とを含んでおり、上記レーザ走査アセンブリは、第2直線スライド台モジュールと、環状フレームと、レーザスキャナとを含み、前記第2直線スライド台モジュールは前記ラックに配置され、前記環状フレームの並進移動を駆動し、前記環状フレームには、円周方向に等間隔に配置された3つの前記レーザスキャナが固定され、前記内支持クランプは、固定円盤、円形外蓋、支持棒及び駆動部材を含み、前記円形外蓋は、前記固定円盤に取り外し可能に固定され、前記円形外蓋に円周方向に等間隔に配置されたm本の第1シュートが設けられ、m≧2であり、前記各第1シュートの向きが前記円形外蓋の径方向に沿って、前記支持棒は、水平かつ円周方向に等間隔に配置されたm本を備え、前記各支持棒は、1つの前記第1シュートと共にスライド対を構成し、前記円形外蓋内の前記駆動部材は、前記各支持棒を駆動して、対応する前記第1シュートに沿って同時に移動させ、前記水平移動機構は前記ラックに設けられ、且つ前記電動伸縮フレームを駆動して並進させ、前記電動伸縮フレームは前記固定円盤を駆動して並進させ、ここで、前記電動伸縮フレームが前記固定円盤を駆動して並進する方向は、前記第2直線スライド台モジュールが前記環状フレームを駆動して並進する方向に平行し、且つ前記水平移動機構が前記電動伸縮フレームを駆動して並進する方向に垂直し、初期状態で、前記電動伸縮フレームは前記水平移動機構の前記レーザ走査アセンブリに近い端部に位置し、前記固定円盤の中心軸線は前記環状フレームの中心軸線と共線に設けられ、前記環状フレームは前記第2直線スライド台モジュールの前記水平移動機構から離れた端部に位置し、前記各支持棒は前記環状フレームを貫通しなく、
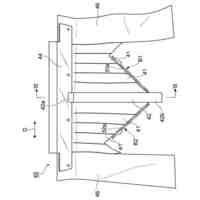
前記高さ測定機構は、第3直線スライド台モジュールと、環状プラテンと、レーザ距離計とを備え、前記レーザ距離計は、第1固定枠を介して前記ラックに固定され、前記第3直線スライド台モジュールのベースは第2固定枠を介して前記ラックに固定され、前記第3直線スライド台モジュールのスライダは、圧力センサが固定された前記環状プラテンに一体成形されたL型リンクに着脱可能に固定されており、ここで、前記第3直線スライド台モジュールが前記環状プラテンを駆動して並進する方向は、前記電動伸縮フレームが前記固定円盤を駆動して並進する方向に平行し、且つ前記水平移動機構が前記電動伸縮フレームを駆動して並進する方向に垂直し、前記電動伸縮フレームが前記水平移動機構の前記レーザ走査アセンブリから離れた端部に位置するとき、前記環状プラテンは前記内支持クランプと前記レーザ距離計との間に位置し、前記環状プラテンの中心軸線は前記固定円盤の中心軸線と共線に設けられる、ことを特徴とする等ピッチ矩形押えばねの螺旋角度測定装置。
続きを表示(約 3,100 文字)
【請求項2】
前記出射端及び前記受信端は、それぞれ2つの固定座に固定され、前記2つの固定座はいずれも前記ラックに固定される、ことを特徴とする請求項1に記載の等ピッチ矩形押えばねの螺旋角度測定装置。
【請求項3】
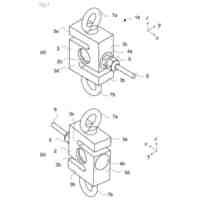
前記駆動部材は、円盤内蓋、ねじ棒、歯車、及び駆動アセンブリを含み、前記円盤内蓋は前記固定円盤に取り外し可能なように取り付けられ、前記円盤内蓋には円周方向に等間隔に配置されたm個の第2シュートが設けられ、各前記第2シュートは1個の前記第1シュートに整列されており、前記歯車は前記固定円盤と回転対を構成し、前記駆動アセンブリは、前記歯車周方向に沿って配置されたm個を備え、前記駆動アセンブリは、くさびブロックと移動ブロックとを含み、前記くさびブロックと前記固定円盤は歯車接線方向の摺動対を構成し、且つ開設された歯溝を介して前記歯車と歯車対を構成し、前記移動ブロックに一体成形された凸条は、前記くさびブロックに開設された斜めの溝と摺動対を構成し、対応する1つの前記第2シュートと摺動対を構成し、1つの前記駆動アセンブリの前記くさびブロックは、開いたねじ穴を介して前記ねじ棒に接続され、前記ねじ棒は駆動モータによって駆動され、前記各支持棒は一つの前記移動ブロックに固定される、ことを特徴とする請求項1に記載の等ピッチ矩形押えばねの螺旋角度測定装置。
【請求項4】
前記環状プラテンは複数種類のサイズ仕様を備えている、ことを特徴とする請求項1に記載の等ピッチ矩形押えばねの螺旋角度測定装置。
【請求項5】
請求項4に記載の等ピッチ矩形押えばねの螺旋角度測定装置を用いた測定方法であって、
被検出ばねを2つの支持爪の上に置き、次に前記出射端を開き、前記出射端が垂直光カーテンを出射し、前記受信端が垂直光カーテンを受信し、前記被検出ばねが光カーテンの一部を遮蔽し、コントローラは遮蔽された光カーテンに基づいて前記被検出ばねの外径D
1
と内径D
2
を測定し、前記被検出ばねの中径Dを計算し、前記被検出ばねの中径Dは、下記数1である、ステップ1と、
前記出射端を閉じて、前記コントローラは、支持爪群を駆動するように前記第1直線スライド台モジュールを制御して、前記被検出ばねを前記第1直線スライド台モジュールの前記端部とは反対側の端部に移動させ、次に前記コントローラは、前記固定円盤が3本の前記支持棒を前記環状フレームに通させ且つ前記被検出ばねの内輪に通させるまで、前記固定円盤を前記水平移動機構から離れる方向に並進移動させるように前記電動伸縮フレームを制御し、その後、前記駆動部材は3本の前記支持棒を駆動して対応する前記第1シュートに沿って同期して外側に拡張し、3本の前記支持棒が前記被検出ばね内輪と接触するまで、前記コントローラは前記電動伸縮フレームを制御して前記固定円盤を駆動して初期位置に戻る、ステップ2と、
前記コントローラは前記第2直線スライド台モジュールを制御して前記環状フレームを駆動して前記固定円盤に近い方向に並進させ、同時に前記各レーザスキャナはスキャンを開始し、前記被検出ばねと前記各支持棒はすべて前記環状フレームを通過し、前記環状フレームは前記被検出ばねを越え、そして前記第2直線スライド台モジュールの前記水平移動機構に近い端部に移動し、前記各レーザスキャナはそれぞれスキャンして得られた突然変異点の個数λ
1
、λ
2
、λ
3
を前記コントローラに転送し、前記コントローラは前記被検出ばねの総コイル数N
1
と有効コイル数Nを計算し、前記被検出ばねの総コイル数N
1
は、下記数2であり、
前記被検出ばねの有効コイル数Nは、下記数3であり、
下記数2のΛは、下記数4である、ステップ3と、
前記コントローラは、前記環状フレームを駆動して元の位置に戻すように前記第2直線スライド台モジュールを制御し、前記水平移動機構は、前記電動伸縮フレームを駆動して前記被検出ばねを前記水平移動機構の前記レーザ走査アセンブリから離れた端部まで移動させ、次に、前記被検出ばねの外径よりも小さく、かつ、前記被検出ばねの内径よりも大きい内径を有する環状の固定板を、前記第3直線スライド台モジュールの前記スライダに固定し、前記コントローラは、前記第3直線スライド台モジュールを制御して前記環状プラテンを前記水平移動機構に近づく方向に移動させるように駆動し、前記各支持棒を前記環状プラテンに貫通させ、前記環状プラテンを前記被検出ばねに接触させ、前記被検出ばねを前記円形外蓋に接触させるように押し、前記環状プラテンは、前記被検出ばねが完全に圧縮されるまで、前記被検出ばねへの圧縮を開始し、前記レーザ距離計は、このときの前記レーザ距離計と前記環状プラテンとの距離X
1
を測定し、前記コントローラにデータを送信し、そして、前記コントローラは、前記第3直線スライド台モジュールを制御して、前記環状プラテンを前記第2直線スライド台モジュールから離れる方向に移動させるように駆動し、前記圧力センサが検出した圧力値が予め設定された閾値よりも小さい場合、前記レーザ距離計は、このときの前記レーザ距離計と前記環状プラテンとの距離X
2
を測定し、データを前記コントローラに送信し、前記コントローラは、前記被検出ばねの自由長さL
0
、完全圧縮後の長さL
1
、ピッチt、ばねの螺旋角度を計算し、前記被検出ばねの自由長さL
0
は、下記数5であり、
完全圧縮後の長さL
1
は、下記数6であり、
前記被検出ばねのピッチtは、下記数7であり、
前記被検出ばねの螺旋角度αは、下記数8である、ステップ4と、
前記コントローラは前記第3直線スライド台モジュールを制御して前記環状プラテンを元の位置に戻すように駆動し、次に前記駆動部材は前記各支持棒を駆動して対応する前記第1シュートに沿って同期して内側に移動して元の位置にし、それから検出を完了したばねを取り外し、前記水平移動機構は前記電動伸縮フレームを元の位置に移動するように駆動し、前記第1直線スライド台モジュールは支持爪群を元の位置に移動するように駆動する、ステップ5とを含む、ことを特徴とする測定方法。
JPEG
2024166098000018.jpg
37
82
JPEG
2024166098000019.jpg
56
82
JPEG
2024166098000020.jpg
22
82
JPEG
2024166098000021.jpg
12
82
JPEG
2024166098000022.jpg
17
82
ただし、Sは前記レーザ距離計と前記円形外蓋との距離、dは前記環状プラテンの厚さである。
JPEG
2024166098000023.jpg
17
82
JPEG
2024166098000024.jpg
30
82
JPEG
2024166098000025.jpg
31
82
発明の詳細な説明
【技術分野】
【0001】
本発明は、エンジニアリングプラスチックの自動加工の分野のものであり、特に、等ピッチ矩形押えばねの螺旋角度測定装置及び方法に関する。
続きを表示(約 2,600 文字)
【背景技術】
【0002】
螺旋角度はばねの重要なパラメータであり、螺旋角度の大きさはばねの性能に影響する。ばねの螺旋角度が大きすぎると、螺旋角度の増加に伴ってばね応力が増加し、さらに荷重偏心量が増加し、ばねの外径や横方向の変形が大きくなるとともに、ばねの疲労源がばねコイルの内側から外側に移行し、ばね寿命が短くなる。螺旋角度が小さい場合、ばねの弾性が不足する。加工後のばねは、その螺旋角度が適正であるか否かを正確に検出することができないため、人為的に計算され、切断装置に入力されたばね加工パラメータが正しいか否かを正確に判断することができない。そのため、ばねの螺旋角度を検出するために使用できる検出装置を設計し、加工終了後のばねの螺旋角度の良否を判断する必要がある。
【発明の概要】
【発明が解決しようとする課題】
【0003】
本発明は、従来技術の欠点を克服するために、等ピッチ矩形押えばねの螺旋角度測定装置及び方法を提案する。
【課題を解決するための手段】
【0004】
上記の目的を達成するために、本発明は以下の技術的解決手段を採用する。
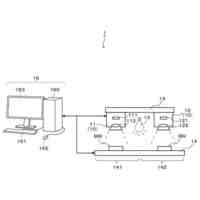
本発明は、ラックと、中径測定機構と、コイル数測定機構と、高さ測定機構とを備えた等ピッチ矩形押えばねの螺旋角度測定装置を提供する。
【0005】
中心径測定機構は、光カーテンマイクロメータと、第1直線スライド台モジュールと、支持爪群とを含む。上記第1直線スライド台モジュールは、ラック上に配置され、間隔をあけて配置された逆八の字形をした2つの支持爪を含む支持爪群を並進駆動する。上記光カーテンマイクロメータの出射端と受信端はいずれもラックに固定されており、それぞれ第1直線スライド台モジュールの両側に位置している。初期状態では、支持爪群は第1直線スライド台モジュールの端部A
1
(光カーテンマイクロメータ側に近い端部)に位置し、支持爪群の2つの支持爪は、出射端から出射される垂直光カーテンに対して対称に配置されている。
【0006】
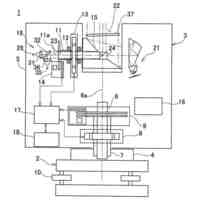
上記コイル数測定機構は、レーザ走査アセンブリと、内支持クランプと、電動伸縮フレームと、水平移動機構とを含む。上記レーザ走査アセンブリは、第2直線スライド台モジュールと、環状フレームと、レーザスキャナとを含む。第2直線スライド台モジュールはラックに配置され、環状フレームの並進移動を駆動する。環状フレームには、円周方向に等間隔に配置された3つのレーザスキャナが固定されている。上記内支持クランプは、固定円盤、円形外蓋、支持棒及び駆動部材を含む。上記円形外蓋は、固定円盤に取り外し可能に固定されている。円形外蓋に円周方向に等間隔に配置されたm本の第1シュートが設けられ、m≧2であり、各第1シュートの向きが円形外蓋の径方向に沿っている。支持棒は、水平かつ円周方向に等間隔に配置されたm本を備え、各支持棒は、1つの第1シュートと共にスライド対を構成する。円形外蓋内の駆動部材は、各支持棒を駆動して対応する第1シュートに沿って同時に移動させる。上記水平移動機構はラックに設けられ、且つ電動伸縮フレームを駆動して並進させ、電動伸縮フレームは固定円盤を駆動して並進させる。ここで、電動伸縮フレームが固定円盤を駆動して並進する方向は、第2直線スライド台モジュールが環状フレームを駆動して並進する方向に平行し、且つ水平移動機構が電動伸縮フレームを駆動して並進する方向に垂直する。初期状態で、電動伸縮フレームは水平移動機構の端部B
1
(水平移動機構のレーザ走査アセンブリに近い端部)に位置し、固定円盤の中心軸線は環状フレームの中心軸線と共線に設けられ、環状フレームは第2直線スライド台モジュールの端部C
1
(水平移動機構から離れた端部)に位置し、各支持棒は環状フレームを貫通しない。
【0007】
上記高さ測定機構は、第3直線スライド台モジュールと、環状プラテンと、レーザ距離計とを備える。上記レーザ距離計は、第1固定枠を介してラックに固定され、第3直線スライド台モジュールのベースは第2固定枠を介してラックに固定され、第3直線スライド台モジュールのスライダは、圧力センサが固定された環状プラテンに一体成形されたL型リンクに着脱可能に固定されている。ここで、第3直線スライド台モジュールが環状プラテンを駆動して並進する方向は、電動伸縮フレームが固定円盤を駆動して並進する方向に平行し、且つ水平移動機構が電動伸縮フレームを駆動して並進する方向に垂直する。電動伸縮フレームが水平移動機構の端部B
2
(水平移動機構のレーザ走査アセンブリから離れた端部)に位置するとき、環状プラテンは内支持クランプとレーザ距離計との間に位置し、環状プラテンの中心軸線は固定円盤の中心軸線と共線に設けられる。
【0008】
好ましくは、上記出射端及び受信端は、それぞれ2つの固定座に固定され、両固定座はラックに固定される。
【0009】
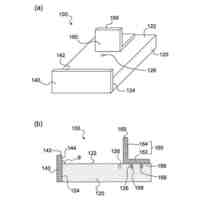
好ましくは、上記駆動部材は、円盤内蓋、ねじ棒、歯車、及び駆動アセンブリを含む。円盤内蓋は固定円盤に取り外し可能なように取り付けられている。円盤内蓋には円周方向に等間隔に配置されたm個の第2シュートが設けられ、各第2シュートは1個の第1シュートに整列されている。歯車は固定円盤と回転対を構成する。駆動アセンブリは、歯車周方向に沿って配置されたm個を備え、駆動アセンブリは、くさびブロックと移動ブロックとを含む。くさびブロックと固定円盤は歯車接線方向の摺動対を構成し、開設された歯溝を介して歯車と歯車対を構成する。移動ブロックに一体成形された凸条は、くさびブロックに開設された斜めの溝と摺動対を構成し、対応する1つの第2シュートと摺動対を構成する。1つの駆動アセンブリのくさびブロックは、開いたねじ穴を介してねじ棒に接続され、ねじ棒は駆動モータによって駆動される。各支持棒は一つの移動ブロックに固定される。
【0010】
好ましくは、上記環状プラテンは複数種類のサイズ仕様を備えている。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
甲神電機株式会社
電流検出器
7日前
甲神電機株式会社
電流センサ
7日前
甲神電機株式会社
漏電検出器
7日前
株式会社大真空
センサ
2日前
株式会社高橋型精
採尿具
8日前
ユニパルス株式会社
ロードセル
1日前
株式会社トプコン
測量装置
7日前
豊田合成株式会社
表示装置
7日前
トヨタ自動車株式会社
画像検査装置
2日前
株式会社大真空
センサ及びその製造方法
1日前
株式会社テクノメデイカ
採血分注システム
7日前
公立大学法人大阪
蛍光X線分析装置
2日前
岡谷精立工業株式会社
ひずみ測定装置
2日前
トヨタ自動車株式会社
走行経路提示システム
1日前
株式会社日本マイクロニクス
プローブ
1日前
株式会社日本マイクロニクス
プローブ
1日前
トヨタ自動車株式会社
充電施設提示システム
1日前
株式会社JVCケンウッド
ナビゲーション装置
今日
株式会社ミツトヨ
画像測定機およびプログラム
8日前
村角工業株式会社
医療検査用カセットオープナー
1日前
鹿島建設株式会社
放射線量計測方法
1日前
株式会社イシダ
X線検査装置
2日前
株式会社イシダ
X線検査装置
2日前
株式会社デンソー
測距装置
1日前
株式会社ディスコ
調整方法
1日前
日本製鉄株式会社
金属材料の多軸評価試験構造
1日前
マツダ株式会社
試料の測定方法
2日前
ミネベアミツミ株式会社
歪みゲージモジュール
今日
ミネベアミツミ株式会社
歪みゲージモジュール
今日
ミネベアミツミ株式会社
歪みゲージモジュール
今日
KEYTEC株式会社
コンクリート壁面筋状態探査装置
1日前
京葉瓦斯株式会社
予測水位測定装置
7日前
トヨタバッテリー株式会社
二次電池状態判定方法
1日前
株式会社トライフォース・マネジメント
力覚センサ
1日前
株式会社ナ・デックス
加工不良判断装置
7日前
株式会社島津製作所
電気伝導度検出器
7日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ