TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025018812
公報種別
公開特許公報(A)
公開日
2025-02-06
出願番号
2023122825
出願日
2023-07-27
発明の名称
力覚センサ
出願人
株式会社トライフォース・マネジメント
代理人
個人
,
個人
主分類
G01L
5/165 20200101AFI20250130BHJP(測定;試験)
要約
【課題】高性能化を図ることができる力覚センサを提供する。
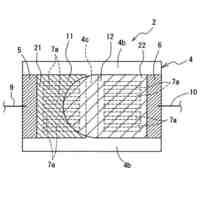
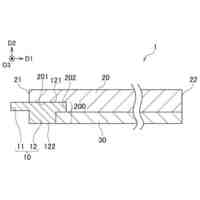
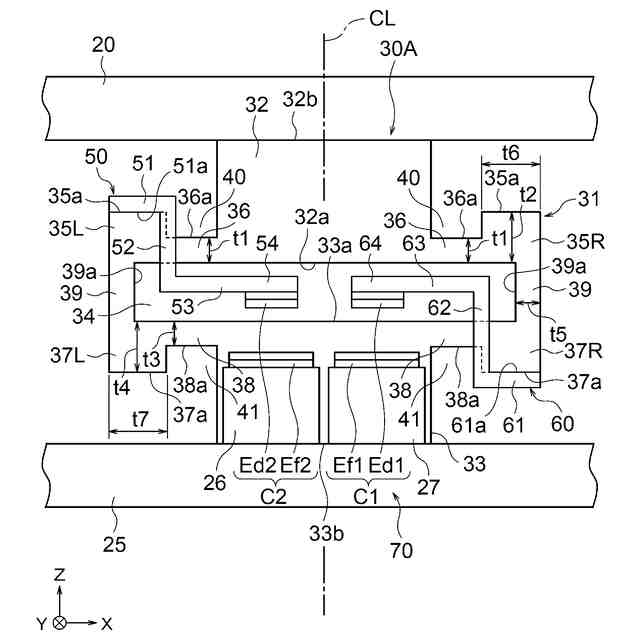
【解決手段】第1センサ体と、第2センサ体と、第1センサ体と第2センサ体とを接続する起歪体と、検出素子と、検出回路と、を備えている。起歪体は、第1変位部と、第2変位部と、傾動構造体と、第1接続部と、第2接続部と、を含んでいる。傾動構造体は、第1接続部に対して第2方向の両側に配置された一対の第1傾動部と、第2接続部に対して第2方向の両側に配置された一対の第2傾動部と、を含んでいる。第1変位部は、第1接続部に対して第2方向における一側に配置された第1傾動部に接続され、第2変位部は、第2接続部に対して第2方向における他側に配置された第2傾動部に接続されている。
【選択図】図4
特許請求の範囲
【請求項1】
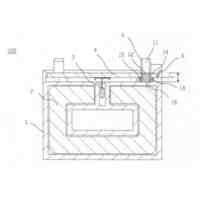
検出対象となる力またはモーメントの作用を受ける第1センサ体と、
第1方向において前記第1センサ体と異なる位置に配置された第2センサ体と、
前記第1センサ体と前記第2センサ体とを接続し、前記第1センサ体が受けた力またはモーメントの作用により弾性変形する起歪体と、
前記起歪体の弾性変形により生じた変位を検出する検出素子と、
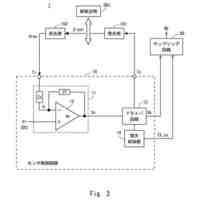
前記検出素子の検出結果に基づいて、前記第1センサ体に作用した力またはモーメントを示す電気信号を出力する検出回路と、
を備え、
前記起歪体は、前記第1センサ体が前記第1方向の力を受けた場合に前記第1方向において互いに反対側に変位する第1変位部および第2変位部を含み、
前記検出素子は、前記第1変位部および前記第2変位部のうちの一方の前記第1方向の変位により静電容量値の変化を検出する第1容量素子と、前記第1変位部および前記第2変位部のうちの他方の前記第1方向の変位により静電容量値の変化を検出する第2容量素子と、を含み、
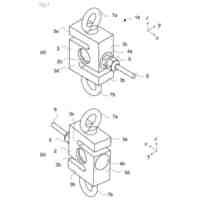
前記起歪体は、前記第1センサ体と前記第2センサ体との間に配置された傾動構造体と、前記第1センサ体と前記傾動構造体とを接続する第1接続部と、前記第2センサ体と前記傾動構造体とを接続する第2接続部と、を含み、
前記傾動構造体は、前記第1接続部に接続されるとともに前記第1接続部に対して前記第1方向に直交する第2方向の両側に配置された一対の第1傾動部と、前記第2接続部に接続されるとともに前記第2接続部に対して前記第2方向の両側に配置された一対の第2傾動部と、を含み、
前記第1変位部は、前記第1接続部に対して前記第2方向における一側に配置された前記第1傾動部に接続され、
前記第2変位部は、前記第2接続部に対して前記第2方向における他側に配置された前記第2傾動部に接続されている、
力覚センサ。
続きを表示(約 1,300 文字)
【請求項2】
前記第1変位部は、対応する前記第1傾動部に対して他の前記第1傾動部の側に配置され、
前記第2変位部は、対応する前記第2傾動部に対して他の前記第2傾動部の側に配置されている、
請求項1に記載の力覚センサ。
【請求項3】
前記第1変位部は、第1腕部を介して前記第1傾動部に接続され、
前記第1腕部は、前記第2方向のうち対応する前記第1傾動部から他の前記第1傾動部に向かう方向に延び、
前記第2変位部は、第2腕部を介して前記第2傾動部に接続され、
前記第2腕部は、前記第2方向のうち対応する前記第2傾動部から他の前記第2傾動部に向かう方向に延びている、
請求項2に記載の力覚センサ。
【請求項4】
前記第1腕部は、対応する前記第1傾動部の前記第1センサ体に対向する面に、第1連結部を介して取り付けられ、
前記第2腕部は、対応する前記第2傾動部の前記第2センサ体に対向する面に、第2連結部を介して取り付けられている、
請求項3に記載の力覚センサ。
【請求項5】
前記第1変位部および前記第2変位部は、前記第1方向および前記第2方向に直交する第3方向において、前記傾動構造体の一側に配置されている、
請求項1に記載の力覚センサ。
【請求項6】
前記傾動構造体は、対応する前記第1傾動部を前記第1接続部に接続する一対の第1変形部と、対応する前記第2傾動部を前記第2接続部に接続する一対の第2変形部と、を更に含み、
前記第1変形部の前記第1方向の寸法は、前記第1傾動部の前記第1方向の寸法よりも小さく、
前記第2変形部の前記第1方向の寸法は、前記第2傾動部の前記第1方向の寸法よりも小さい、
請求項1に記載の力覚センサ。
【請求項7】
前記第1変形部は、前記第1センサ体に対向する第1対向面を含み、
前記第1対向面は、前記第1傾動部の前記第1センサ体に対向する面よりも前記第2センサ体の側に配置され、
前記第2変形部は、前記第2センサ体に対向する第2対向面を含み、
前記第2対向面は、前記第2傾動部の前記第2センサ体に対向する面よりも前記第1センサ体の側に配置されている、
請求項6に記載の力覚センサ。
【請求項8】
前記第1対向面および前記第2対向面はそれぞれ、湾曲状に形成されている、
請求項7に記載の力覚センサ。
【請求項9】
前記傾動構造体は、前記第1傾動部と対応する前記第2傾動部とを接続する一対の第3変形部を更に含み、
前記第3変形部の前記第2方向の寸法は、前記第1傾動部の前記第2方向の寸法よりも小さく、前記第2傾動部の前記第2方向の寸法よりも小さい、
請求項8に記載の力覚センサ。
【請求項10】
前記第3変形部は、他の前記第3変形部に対向する湾曲状の第3対向面を含んでいる、
請求項9に記載の力覚センサ。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、力覚センサに関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
従来より、所定の軸方向に作用した力および所定の回転軸周りに作用したモーメント(トルク)を電気信号として出力する力覚センサが知られている。力覚センサは、産業用ロボットを初めとして、協働ロボット、生活支援ロボット、医療用ロボットおよびサービスロボット等、各種ロボットの力制御等に幅広く利用されている。
【0003】
力覚センサは、ロボットアームとエンドエフェクター(グリッパー等)の間に配置され、ワークに作用した力を検出する。検出された力は、ロボットの制御に用いられる。例えば、ロボットアームが人に接触した場合には、その接触を力覚センサが検出する。このことにより、ロボットアームの動作を緊急停止することができる。
【0004】
近年の市場規模の拡大に伴い、力覚センサの高性能化が求められている。より具体的には、従来の静電容量型力覚センサ(例えば、特許文献1参照)では、1つの起歪体に、偶数個(例えば、2個)の容量素子が設けられている。Z軸方向(力覚センサの高さ方向)の力Fzが作用すると、これらの容量素子は一様に増大したり、または一様に減少したりしている。この場合、力Fzの出力値が、ノイズまたは周囲温度等の外乱による影響を受け易くなる。
【先行技術文献】
【特許文献】
【0005】
特開2021-135103公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
本発明は、このような点を考慮してなされたものであり、高性能化を図ることができる力覚センサを提供することを目的とする。
【課題を解決するための手段】
【0007】
[1]本開示は、
検出対象となる力またはモーメントの作用を受ける第1センサ体と、
第1方向において前記第1センサ体と異なる位置に配置された第2センサ体と、
前記第1センサ体と前記第2センサ体とを接続し、前記第1センサ体が受けた力またはモーメントの作用により弾性変形する起歪体と、
前記起歪体の弾性変形により生じた変位を検出する検出素子と、
前記検出素子の検出結果に基づいて、前記第1センサ体に作用した力またはモーメントを示す電気信号を出力する検出回路と、
を備え、
前記起歪体は、前記第1センサ体が前記第1方向の力を受けた場合に前記第1方向において互いに反対側に変位する第1変位部および第2変位部を含み、
前記検出素子は、前記第1変位部および前記第2変位部のうちの一方の前記第1方向の変位により静電容量値の変化を検出する第1容量素子と、前記第1変位部および前記第2変位部のうちの他方の前記第1方向の変位により静電容量値の変化を検出する第2容量素子と、を含み、
前記起歪体は、前記第1センサ体と前記第2センサ体との間に配置された傾動構造体と、前記第1センサ体と前記傾動構造体とを接続する第1接続部と、前記第2センサ体と前記傾動構造体とを接続する第2接続部と、を含み、
前記傾動構造体は、前記第1接続部に接続されるとともに前記第1接続部に対して前記第1方向に直交する第2方向の両側に配置された一対の第1傾動部と、前記第2接続部に接続されるとともに前記第2接続部に対して前記第2方向の両側に配置された一対の第2傾動部と、を含み、
前記第1変位部は、前記第1接続部に対して前記第2方向における一側に配置された前記第1傾動部に接続され、
前記第2変位部は、前記第2接続部に対して前記第2方向における他側に配置された前記第2傾動部に接続されている、
力覚センサであってもよい。
【0008】
[2]本開示は、
前記第1変位部は、対応する前記第1傾動部に対して他の前記第1傾動部の側に配置され、
前記第2変位部は、対応する前記第2傾動部に対して他の前記第2傾動部の側に配置されている、
[1]に記載の力覚センサであってもよい。
【0009】
[3]本開示は、
前記第1変位部は、第1腕部を介して前記第1傾動部に接続され、
前記第1腕部は、前記第2方向のうち対応する前記第1傾動部から他の前記第1傾動部に向かう方向に延び、
前記第2変位部は、第2腕部を介して前記第2傾動部に接続され、
前記第2腕部は、前記第2方向のうち対応する前記第2傾動部から他の前記第2傾動部に向かう方向に延びている、
[2]に記載の力覚センサであってもよい。
【0010】
[4]本開示は、
前記第1腕部は、対応する前記第1傾動部の前記第1センサ体に対向する面に、第1連結部を介して取り付けられ、
前記第2腕部は、対応する前記第2傾動部の前記第2センサ体に対向する面に、第2連結部を介して取り付けられている、
[3]に記載の力覚センサであってもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
集束超音波の測定機
15日前
個人
センサ制御回路
15日前
甲神電機株式会社
電流検出器
8日前
株式会社大真空
センサ
3日前
甲神電機株式会社
漏電検出器
8日前
甲神電機株式会社
電流センサ
8日前
株式会社高橋型精
採尿具
9日前
ユニパルス株式会社
ロードセル
2日前
ダイトロン株式会社
外観検査装置
15日前
株式会社トプコン
測量装置
8日前
アズビル株式会社
熱式流量計
9日前
株式会社ミトミ技研
圧力測定装置
15日前
シャープ株式会社
収納装置
9日前
TDK株式会社
磁気センサ
15日前
日本特殊陶業株式会社
ガスセンサ
9日前
豊田合成株式会社
表示装置
8日前
トヨタ自動車株式会社
画像検査装置
3日前
株式会社東京久栄
水中移動体用採水器
9日前
株式会社島津製作所
ガスクロマトグラフ
15日前
ローム株式会社
MEMSデバイス
9日前
株式会社大真空
センサ及びその製造方法
2日前
TDK株式会社
温度センサ
9日前
横河電機株式会社
光源装置
9日前
東ソー株式会社
D-サイロキシン特異的測定方法
15日前
公立大学法人大阪
蛍光X線分析装置
3日前
タカハタプレシジョン株式会社
水道メータ
15日前
株式会社テクノメデイカ
採血分注システム
8日前
ローム株式会社
MEMS装置
15日前
トヨタ自動車株式会社
走行経路提示システム
2日前
トヨタ自動車株式会社
充電施設提示システム
2日前
アズビル株式会社
封止方法および封止部構造
15日前
アズビル株式会社
熱式流量計および補正方法
15日前
株式会社日本マイクロニクス
プローブ
2日前
株式会社日本マイクロニクス
プローブ
2日前
ミネベアミツミ株式会社
位置判定装置
15日前
トヨタ自動車株式会社
推薦方法
9日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ