TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025017576
公報種別
公開特許公報(A)
公開日
2025-02-06
出願番号
2023120705
出願日
2023-07-25
発明の名称
放射線量計測方法
出願人
鹿島建設株式会社
代理人
個人
,
個人
,
個人
主分類
G01T
1/16 20060101AFI20250130BHJP(測定;試験)
要約
【課題】計測作業者の放射線被曝を抑えながら、計測対象領域内における表面線量や空間線量の再現性が高い計測値が得られる放射線量計測方法を提供する。
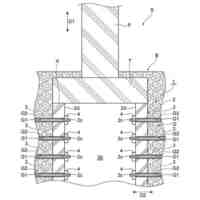
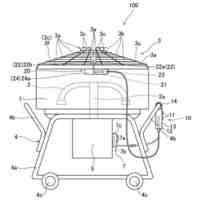
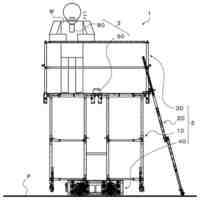
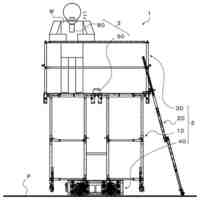
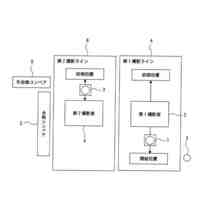
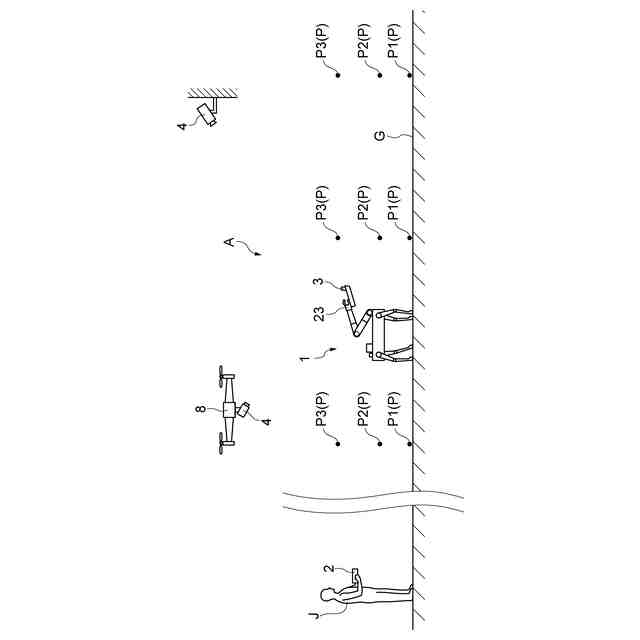
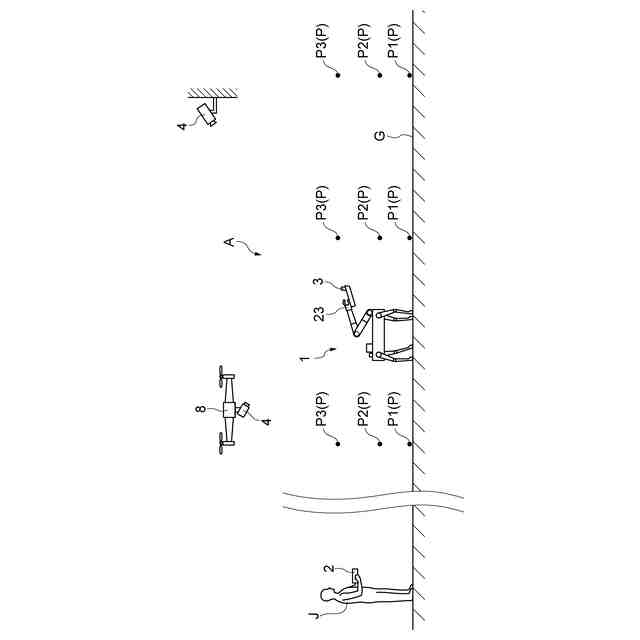
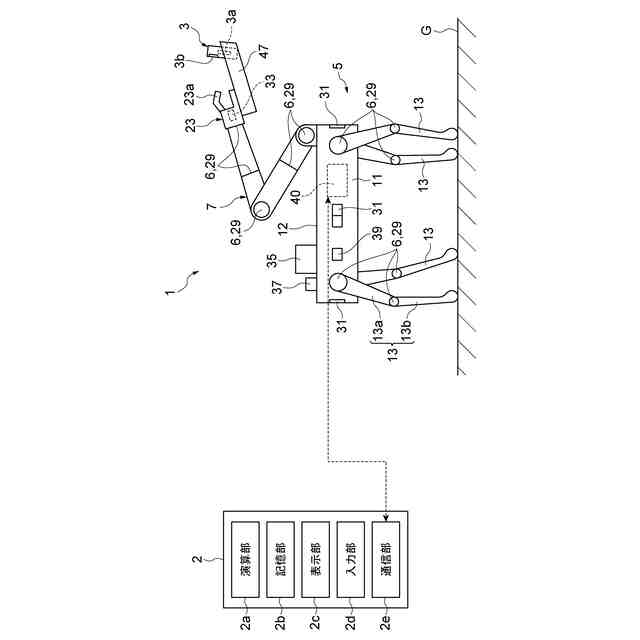
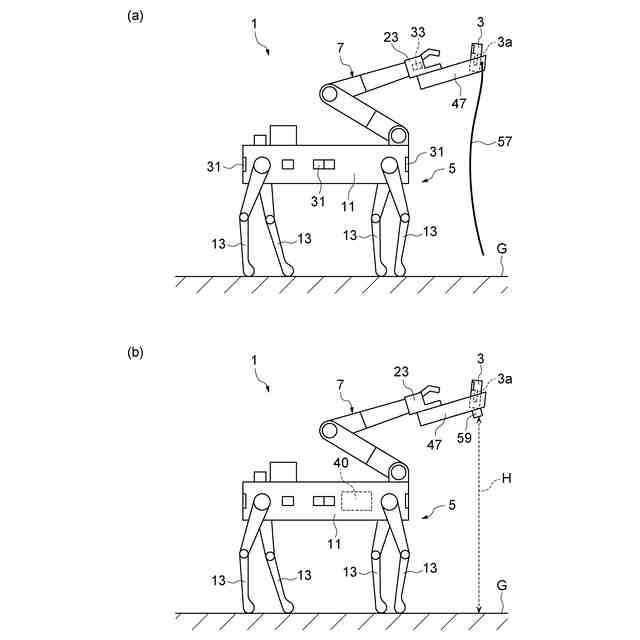
【解決手段】放射線量計測方法は、放射線センサー3aを搭載したロボット1が計測対象領域A内を移動するとともに放射線センサー3aの地面Gからの高さを調整して当該計測対象領域A内の計測点Pにおける放射線量が放射線センサー3aで計測される線量計測工程と、放射線量工程の放射線量の計測時における、放射線センサー3aの地面からの高さに関する情報を含めた放射線センサー3aの三次元的な位置に関するセンサー位置情報が取得されるセンサー位置情報取得工程と、線量計測工程で得られる放射線量の計測値に関する情報が、センサー位置情報取得工程で得られるセンサー位置情報に関連づけられて記録される計測値記録工程と、を備える。
【選択図】図1
特許請求の範囲
【請求項1】
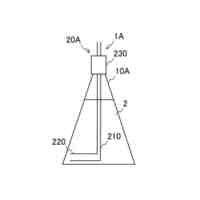
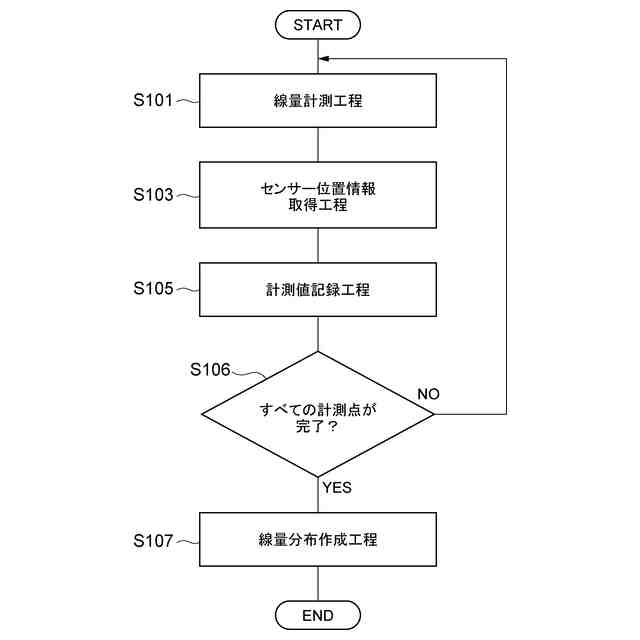
放射線センサーを搭載した無人移動ロボットが計測対象領域内を移動するとともに前記放射線センサーの地面からの高さを調整して当該計測対象領域内の所定の計測点における放射線量が前記放射線センサーで計測される線量計測工程と、
前記線量計測工程の前記放射線量の計測時における、前記放射線センサーの地面からの高さに関する情報を含めた前記放射線センサーの三次元的な位置に関するセンサー位置情報が取得されるセンサー位置情報取得工程と、
前記線量計測工程で得られる前記放射線量の計測値に関する情報が、前記センサー位置情報取得工程で得られる前記センサー位置情報に関連づけられて記録される計測値記録工程と、
を備える、放射線量計測方法。
続きを表示(約 1,400 文字)
【請求項2】
前記線量計測工程、前記センサー位置情報取得工程、及び前記計測値記録工程が前記計測対象領域内の複数の前記計測点で実行され、蓄積された前記計測点ごとの前記放射線量の計測値に関する情報に基づいて、前記計測対象領域内における放射線量の分布が得られる、請求項1に記載の放射線量計測方法。
【請求項3】
前記無人移動ロボットは、前記放射線量とは別の環境情報を計測する環境センサーを搭載しており、
前記無人移動ロボットが前記計測対象領域を移動している間に前記環境センサーによって前記環境情報が計測される環境情報計測工程を更に備える、請求項1に記載の放射線量計測方法。
【請求項4】
前記環境情報は、温度、湿度、酸素濃度、一酸化炭素濃度、及び粉塵濃度のうちの少なくとも一つを含む、請求項3に記載の放射線量計測方法。
【請求項5】
前記無人移動ロボットは、
前記計測対象領域内を移動する移動本体部と、
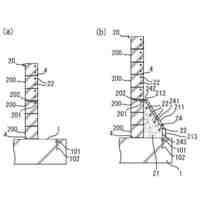
前記移動本体部に設けられ前記放射線センサーが設置された可動アームと、を有し、
前記線量計測工程では、
前記無人移動ロボットが、前記移動本体部の駆動により前記計測点近傍に移動し、前記可動アームの駆動により前記放射線センサーの高さ方向の位置を調整して前記放射線センサーを前記計測点で保持する、請求項1に記載の放射線量計測方法。
【請求項6】
前記移動本体部は、前記可動アームが取付けられた胴部と、前記胴部から延びる複数の脚部と、を備え、複数の前記脚部を前記地面に着けて歩行可能であり、
前記センサー位置情報取得工程では、
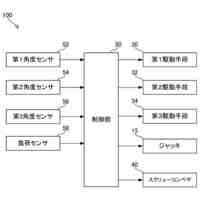
前記胴部、前記脚部、及び前記可動アームに含まれる各関節の各回転角度に基づいて、前記センサー位置情報のうち、前記放射線センサーの地面からの高さに関する情報が取得される、請求項5に記載の放射線量計測方法。
【請求項7】
前記センサー位置情報取得工程では、
前記無人移動ロボットに搭載されたGPS装置により、前記センサー位置情報のうち、前記放射線センサーの平面位置の情報が取得される、請求項6に記載の放射線量計測方法。
【請求項8】
前記可動アームには、
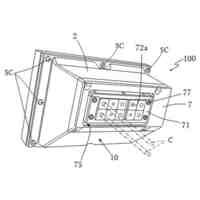
前記放射線センサーと、当該放射線センサーによる放射線量の計測値を表示する計測値表示部と、を有する放射線量計測器と、
前記計測値表示部を撮像するカメラと、が設けられており、
前記計測値記録工程では、前記カメラから得られる撮像情報が前記放射線量の計測値に関する情報として記録される、請求項5に記載の放射線量計測方法。
【請求項9】
前記無人移動ロボットは遠隔操作又は遠隔誘導により動作可能であり、
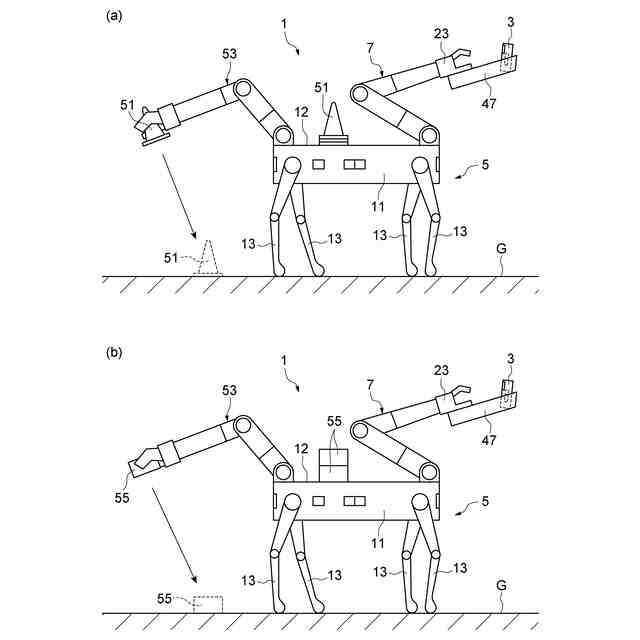
前記無人移動ロボットが、遠隔操作又は遠隔誘導用の電波を中継又は発信する電波機器を移動途中の地点に設置する電波機器設置工程を更に備える、請求項1に記載の放射線量計測方法。
【請求項10】
前記放射線センサーで計測される放射線量が所定の閾値を超えた場合に、前記無人移動ロボットが現在地点に所定のマーカーを構築するマーキング工程を更に備える、請求項1に記載の放射線量計測方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、放射線量計測方法に関するものである。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
従来、放射線量が高い現場で工事を行う際には、事前の作業計画のために当該現場の放射線量の状態を把握する必要がある。例えば、現場では所定の計測対象領域内の複数の場所において、地面の直近で計測される表面線量と、地面から所定の高さ位置で計測される空間線量と、が計測される。この計測作業では、例えば、計測作業者が可搬式放射線量計測器を持って計測対象領域に立ち入って各場所での計測を行う。
【先行技術文献】
【特許文献】
【0003】
特開2014-185967号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら上記の方法では、計測作業者がある程度の放射線被曝をすることになる。また、表面線量や空間線量を計測するために、計測作業者は手に持った計測器を地面から規定の高さ位置に掲げるなどの操作をするが、放射線被曝低減のためには上記のような計測器の高さ位置の調整の操作に多くの時間をかけることができない。従って、計測時における計測器の高さ位置調整は目測等で行う場合も多く、その結果、計測値は必ずしも再現性が高いものであるとは言えない。なお、計測作業者の被曝低減を図るための技術として、上記特許文献1には、移動式線量計測装置が開示されている。しかしながら、この移動式線量計測装置は、放射線源を撮像することで当該放射線源から発する放射線量の計測を行うものであり、地面から所定の高さ位置の空間線量を計測するといったことは困難である。
【0005】
そこで、本発明は、計測作業者の放射線被曝を抑えながら、計測対象領域内における表面線量や空間線量の再現性が高い計測値が得られる放射線量計測方法を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明の要旨は以下の〔1〕~〔11〕に存する。
【0007】
〔1〕放射線センサーを搭載した無人移動ロボットが計測対象領域内を移動するとともに前記放射線センサーの地面からの高さを調整して当該計測対象領域内の所定の計測点における放射線量が前記放射線センサーで計測される線量計測工程と、前記線量計測工程の前記放射線量の計測時における、前記放射線センサーの地面からの高さに関する情報を含めた前記放射線センサーの三次元的な位置に関するセンサー位置情報が取得されるセンサー位置情報取得工程と、前記線量計測工程で得られる前記放射線量の計測値に関する情報が、前記センサー位置情報取得工程で得られる前記センサー位置情報に関連づけられて記録される計測値記録工程と、を備える、放射線量計測方法。
【0008】
〔2〕前記線量計測工程、前記センサー位置情報取得工程、及び前記計測値記録工程が前記計測対象領域内の複数の前記計測点で実行され、蓄積された前記計測点ごとの前記放射線量の計測値に関する情報に基づいて、前記計測対象領域内における放射線量の分布が得られる、〔1〕に記載の放射線量計測方法。
【0009】
〔3〕前記無人移動ロボットは、前記放射線量とは別の環境情報を計測する環境センサーを搭載しており、前記無人移動ロボットが前記計測対象領域を移動している間に前記環境センサーによって前記環境情報が計測される環境情報計測工程を更に備える、〔1〕又は〔2〕に記載の放射線量計測方法。
【0010】
〔4〕前記環境情報は、温度、湿度、酸素濃度、一酸化炭素濃度、及び粉塵濃度のうちの少なくとも一つを含む、〔3〕に記載の放射線量計測方法。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
鹿島建設株式会社
構築方法
1か月前
鹿島建設株式会社
補強構造
6日前
鹿島建設株式会社
接続方法
22日前
鹿島建設株式会社
塔状構造物
21日前
鹿島建設株式会社
地層処分施設
今日
鹿島建設株式会社
床版架設方法
1か月前
鹿島建設株式会社
壁高欄の施工方法
14日前
鹿島建設株式会社
微生物培養システム
8日前
鹿島建設株式会社
基礎構造および構築方法
13日前
鹿島建設株式会社
作業サイクル分析システム
1か月前
鹿島建設株式会社
壁体の構築方法およびタンク
1か月前
鹿島建設株式会社
コンクリートの充填監視方法
13日前
鹿島建設株式会社
コンクリート構造物構築方法
1か月前
鹿島建設株式会社
地層処分施設及び地層処分方法
今日
鹿島建設株式会社
品質評価装置および品質評価方法
1か月前
鹿島建設株式会社
地層処分施設及び廃棄体パッケージ
今日
鹿島建設株式会社
空気搬送システム及び空気搬送方法
今日
鹿島建設株式会社
トンネル掘削方法及びトンネル掘削機
1日前
鹿島建設株式会社
盛土評価システムおよび盛土評価方法
1か月前
鹿島建設株式会社
生態系環境改善部材及び生態系環境改善構造
1か月前
鹿島建設株式会社
作業計画支援方法及び作業計画支援プログラム
13日前
鹿島建設株式会社
二酸化炭素の回収方法、二酸化炭素回収システム
1か月前
鹿島道路株式会社
アスファルト混合物の製造方法
1か月前
鹿島建設株式会社
地盤の評価方法及び格子状改良体の仕様を決定する方法
今日
ゼネラルヒートポンプ工業株式会社
ヒートポンプシステム
1か月前
鹿島建設株式会社
センサユニット及びセンサユニットを備えたモルタルミキサー
2日前
鹿島建設株式会社
整流壁の設置構造、整流壁の製造方法、及び整流壁の設置方法
2日前
株式会社ベルニック
作業台の移動装置および作業台
13日前
鹿島建設株式会社
マット部材、マット部材の製造方法、及びマット部材のひずみ測定システム
14日前
株式会社ベルニック
情報処理装置、作業台、作業システム、情報処理方法およびプログラム
13日前
個人
視触覚センサ
6日前
株式会社イシダ
表示装置
1日前
日本精機株式会社
検出装置
1か月前
個人
採尿及び採便具
1か月前
個人
計量機能付き容器
1か月前
愛知電機株式会社
外観検査装置
2日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ