TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024166064
公報種別
公開特許公報(A)
公開日
2024-11-28
出願番号
2024008113
出願日
2024-01-23
発明の名称
バックグラウンドを取り除いた特性曲線を求める方法
出願人
国立研究開発法人物質・材料研究機構
代理人
主分類
G06F
17/10 20060101AFI20241121BHJP(計算;計数)
要約
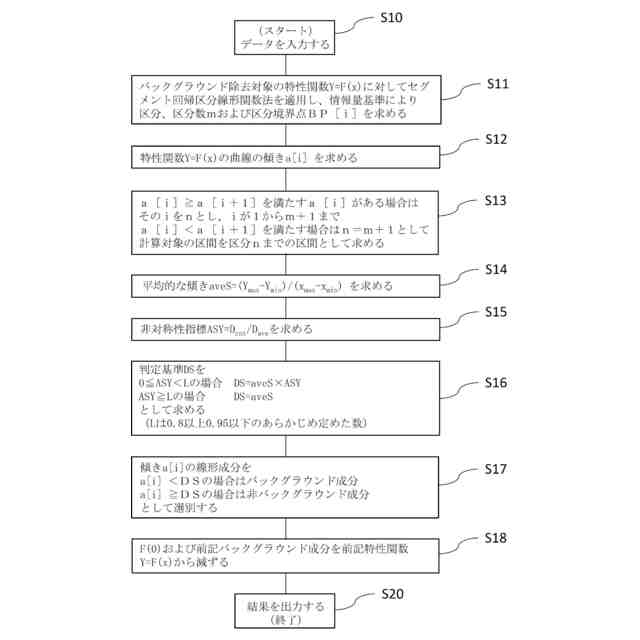
【課題】人為に左右されず、簡便にバックグラウンド除去精度の高いべき乗則、指数則特性曲線を求める方法の提供。
【解決手段】特性関数Y=F(x)に対してセグメント回帰区分線形関数法を適用して情報量基準により区分および区分数を求めるステップと、区分毎の特性関数の曲線の傾きa[i]を求めるステップと、特性関数の平均的な傾きaveSを求めるステップと、全区分を通してのデータの値の平均値と中央値から非対称性指標ASYを求めるステップと、判定基準DSを平均的な傾きaveSと非対称性指標ASYを用いて求めるステップと、傾きa[i]の線形成分がa[i]<DSの場合はバックグラウンド成分、a[i]≧DSの場合は非バックグラウンド成分として選別判定するステップと、F(0)とバックグラウンド成分を特性関数から減ずるステップからなる。
【選択図】図1
特許請求の範囲
【請求項1】
バックグラウンド除去対象の特性関数Y=F(x)に対してセグメント回帰区分線形関数法を適用し、情報量基準により区分、区分数mおよび区分境界点(BP[j])(ここでjは0からmまでの整数、BP[0]はxの最小値、BP[m]はxの最大値)を求めるステップと、
前記情報基準により求められた区分i(iは1からmまでの整数)毎の前記特性関数Y=F(x)の曲線の傾きa[i]およびF(0)を求めるステップと、
a[i]≧a[i+1]を満たすa[i]がある場合は、前記iの最小値をnとし、前記iが1からmまでa[i]<a[i+1]を満たす場合は、n=mとして計算対象の区間を区分nまでの区間として求めるステップと、
第1の指標として、前記区分の1からnまでの区間で、前記Yの最大値Y
max
、最小値Y
min
、前記xの最大値x
max
および最小値x
min
を用いて、(Y
max
-Y
min
)/(x
max
-x
min
)で定義される前記特性関数Y=F(x)の平均的な傾き(aveS)を求めるステップと、
第2の指標として、前記区分の1からnまでの区分を通してのデータ(Y)の値の平均値(D
ave
)と中央値(D
cnt
)の比から非対称性指標(ASY=D
cnt
/D
ave
)を求めるステップと、
判定基準(DS)を前記平均的な傾き(aveS)と前記非対称性指標(ASY)および0.80以上0.95以下の値の中からあらかじめ定めた基準値Lを用いて
0≦ASY<Lの場合 DS=aveS×ASY、
ASY≧Lの場合 DS=aveS
として求めるステップと、
前記傾きa[i](iは1からnまでの整数)の線形成分が、
a[i]<DSの場合はバックグラウンド成分
a[i]≧DSの場合は非バックグラウンド成分として選別判定するステップと、
F(0)および前記バックグラウンド成分を前記特性関数Y=F(x)から減ずるステップ、を含むステップからなる、特性曲線を求める方法。
続きを表示(約 5,900 文字)
【請求項2】
バックグラウンド除去対象の特性関数Y=F(x)に対してセグメント回帰区分線形関数法を適用し、情報量基準により区分、区分数mおよび区分境界点(BP[j])(ここでjは0からmまでの整数、BP[0]はxの最小値、BP[m]はxの最大値)を求めるステップと、
前記情報基準により求められた区分i(iは1からmまでの整数)毎の前記特性関数Y=F(x)の曲線の傾き(a[i])を前記各区分の始点と終点間の傾きとして求めるステップと、
a[i]≧a[i+1]を満たすa[i]がある場合は、前記iの最小値をnとし、前記iが1からmまでa[i]<a[i+1]を満たす場合は、n=mとして、計算対象の区間を区分nまでの区間として求めるステップと、
第1の指標として、前記区分の1からnまでの区間で、前記Yの最大値Y
max
、最小値Y
min
、前記xの最大値x
max
および最小値x
min
を用いて、(Y
max
-Y
min
)/(x
max
-x
min
)で定義される前記特性関数Y=F(x)の平均的な傾き(aveS)を求めるステップと、
第2の指標として、前記区分の1からnまでの区分を通してのデータ(Y)の値の平均値(D
ave
)と中央値(D
cnt
)の比から、下記(式2)で与えられる非対称性指標(ASY)を計算するステップと、
判定基準(DS)を前記平均的な傾き(aveS)と前記非対称性指標(ASY)および0.80以上0.95以下の値の中からあらかじめ定めた基準値Lを用いて、0≦ASY<Lの場合は下記(式3)、ASY≧Lの場合は下記(式4)により求めるステップと、
前記a[i](iは1からnまでの整数)と前記判定基準(DS)を比較して、iが1からnまでの範囲で、a[i]≧DSとなるiがある場合はa[i]≧DSを満たす最小のiをt、a[i]<DSの場合はt=nとして、線形バックグラウンド区分区間範囲を示す最大区間区分tを求めるステップと、
線形バックグラウンドが取り除かれた特性曲線Y´を下記(式5)から(式7)より求めるステップからなる、特性曲線を求める方法。
aveS=(Y
max
-Y
min
)/(x
max
-x
min
) ・・・(式1)
ASY=D
cnt
/D
ave
・・・(式2)
DS=aveS×ASY ・・・(式3)
DS=aveS ・・・(式4)
Y´=F(x)-F
background
・・・(式5)
JPEG
2024166064000012.jpg
41
168
【請求項3】
前記情報量基準は、ベイズ情報量基準(Bayesian Information Criterion;BIC)または赤池情報量基準(Akaike Information Criterion;AIC)である、請求項1または2記載の特性曲線を求める方法。
【請求項4】
前記基準値Lは0.9である、請求項1から3の何れか一項に記載の特性曲線を求める方法。
【請求項5】
前記特性関数は、超電導材料の臨界電流密度関数である、請求項1から4の何れか一項に記載の特性曲線を求める方法。
【請求項6】
バックグラウンド除去対象の特性関数Y=F(x)に対してセグメント回帰区分線形関数法を適用し、情報量基準により区分、区分数mおよび区分境界点(BP[j])(ここでjは0からmまでの整数、BP[0]はxの最小値x
min
、BP[m]はxの最大値x
max
)を求めるステップと、
前記情報基準により求められた区分i(iは1からmまでの整数)毎の前記特性関数Y=F(x)の曲線の傾き(a[i])を前記各区分の始点と終点間の傾きとして求めるステップと、
a[i]≧a[i+1]を満たすa[i]がある場合は、前記iの最小値をnとし、前記iが1からmまでa[i]<a[i+1]を満たす場合は、n=mとして、計算対象の区間を区分nまでの区間として求めるステップと、
第1aの指標として、前記区分の1からnまでの区間で、前記Yの最大値Y
max
、最小値Y
min
、前記xの最大値x
max
および最小値x
min
を用いて、下記(式1a)で定義される前記特性関数Y=F(x)の平均的な傾き(aveS)を求めるステップと、
第2aの指標として、前記x
min
を0、前記x
max
を1、F(x
min
)を0、F(x
max
)を1として(x、Y)を規格化しローレンツ曲線から求めたジニ係数(GiNi)より計算される(1-GiNi)を求めるステップと、
判定基準(DSa)を、前記平均的な傾き(aveS)と前記第2aの指標である(1-GiNi)を用いて、下記(式2a)により求めるステップと、
前記a[i](iは1からnまでの整数)と前記判定基準(DSa)を比較して、iが1からnまでの範囲で、a[i]≧DSaとなるiがある場合はa[i]≧DSaを満たす最小のiをt
a
、a[i]<DSaの場合はt
a
=nとして、線形バックグラウンド区分区間範囲を示す最大区間区分t
a
を求めるステップと、
線形バックグラウンドが取り除かれた特性曲線Ya´を下記(式3a)より求めるステップからなる、特性曲線を求める方法。
aveS=(Y
max
-Y
min
)/(x
max
-x
min
) ・・・(式1a)
DSa=aveS×(1-GiNi) ・・・(式2a)
Ya´=F(x)-F
background,a
・・・(式3a)
JPEG
2024166064000013.jpg
31
147
【請求項7】
バックグラウンド除去対象の特性関数Y=F(x)に対してセグメント回帰区分線形関数法を適用し、情報量基準により区分、区分数mおよび区分境界点(BP[j])(ここでjは0からmまでの整数、BP[0]はxの最小値x
min
、BP[m]はxの最大値x
max
)を求めるステップと、
前記情報基準により求められた区分i(iは1からmまでの整数)毎の前記特性関数Y=F(x)の曲線の傾き(a[i])を前記各区分の始点と終点間の傾きとして求めるステップと、
a[i]≧a[i+1]を満たすa[i]がある場合は、前記iの最小値をnとし、前記iが1からmまでa[i]<a[i+1]を満たす場合は、n=mとして、計算対象の区間を区分nまでの区間として求めるステップと、
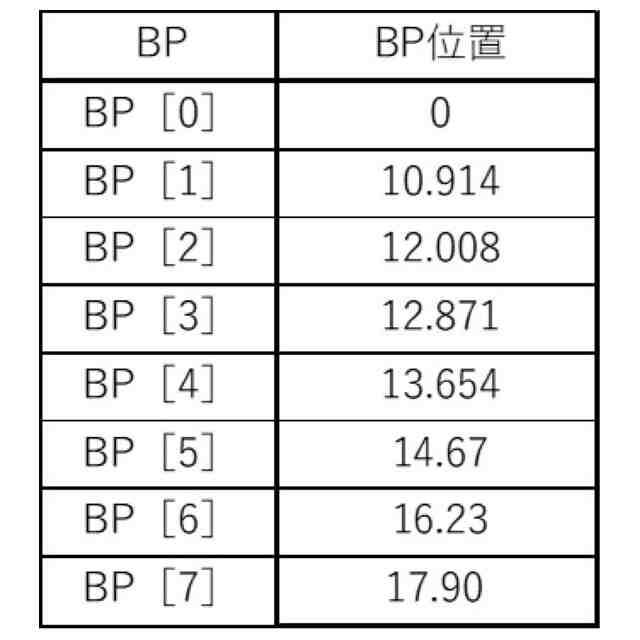
隣接する前記区分境界点(BP[j])間の距離ΔBP[j
b
]=BP[j+1]-BP[j](j
b
は1からnまでの整数、jは0からn‐1まで)を求めるステップと、
前記ΔBP[j
b
]に対してK-means法を適用して前記ΔBP[j
b
]を前記距離の短いグループG
a
と長いグループG
b
の2グループに分類するステップと、
幅ΔBP[j
b
]が前記グループGaに属するときは0を、前記グループGbに属するときは1を区分BD[j
b
]の値として割り当てるステップと、
ΔBP[n+1]およびΔBP[n+2]の値として、ΔBP[n]と同じ値を割り当てた仮想のΔBP[n+1]およびΔBP[n+2]を作成するステップと、
ΔBP[j
b
]の値が、ΔBP[j
b
+1]の値およびΔBP[j
b
+2]の値と同じ値になる最小のj
b
を求め、該値をj
b、Gamax
とするステップと、
線形バックグラウンド区分区間範囲を示す最大区間区分t
b
をt
b
=j
b、Gamax
として計算するステップと、
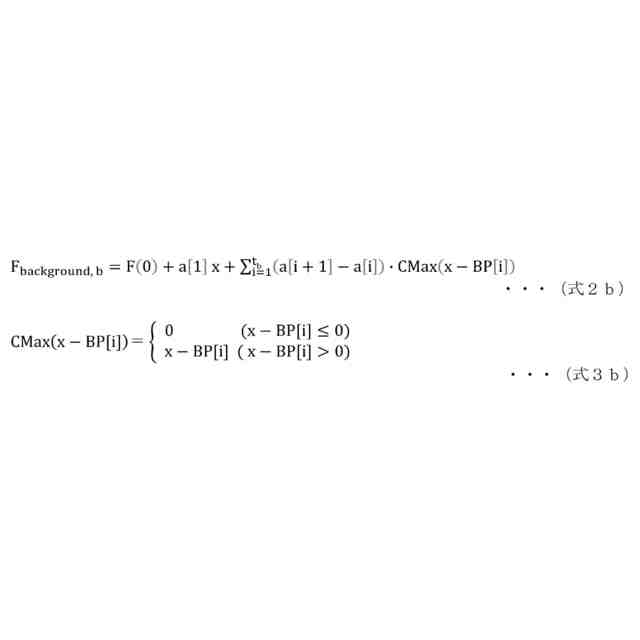
線形バックグラウンドが取り除かれた特性曲線Yb´を下記(式1b)より求めるステップからなる、特性曲線を求める方法。
Y
b
´=F(x)-F
background,b
・・・(式1b)
JPEG
2024166064000014.jpg
37
170
【請求項8】
バックグラウンド除去対象の特性関数Y=F(x)に対してセグメント回帰区分線形関数法を適用し、情報量基準により区分、区分数mおよび区分境界点(BP[j])(ここでjは0からmまでの整数、xの最小値x
min
、BP[m]はxの最大値x
max
)を求めるステップと、
前記情報基準により求められた区分i(iは1からmまでの整数)毎の前記特性関数Y=F(x)の曲線の傾き(a[i])を前記各区分の始点と終点間の傾きとして求めるステップと、
a[i]≧a[i+1]を満たすa[i]がある場合は、前記iの最小値をnとし、前記iが1からmまでa[i]<a[i+1]を満たす場合は、n=mとして、計算対象の区間を区分nまでの区間として求めるステップと、
第1の指標として、前記区分の1からnまでの区間で、前記Yの最大値Y
max
、最小値Y
min
、前記xの最大値x
max
および最小値x
min
を用いて、下記(式11)で定義される前記特性関数Y=F(x)の平均的な傾き(aveS)を求めるステップと、
第2の指標として、前記区分の1からnまでの区分を通してのデータ(Y)の値の平均値(D
ave
)と中央値(D
cnt
)の比から、下記(式12)で与えられる非対称性指標(ASY)を計算するステップと、
第1の判定基準(DS)を前記平均的な傾き(aveS)と前記非対称性指標(ASY)および0.80以上0.95以下の値の中からあらかじめ定めた基準値Lを用いて、0≦ASY<Lの場合は下記(式13)、ASY≧Lの場合は下記(式14)により求めるステップと、
前記a[i](iは1からnまでの整数)と前記第1の判定基準(DS)を比較して、iが1からnまでの範囲で、a[i]≧DSとなるiがある場合はa[i]≧DSを満たす最小のiをt、a[i]<DSの場合はt=nとして、線形バックグラウンド区分区間範囲を示す最大区間区分tを求めるステップと、
第3の指標として、前記x
min
を0、前記x
max
を1、F(x
min
)を0、F(x
max
)を1として(x、Y)を規格化しローレンツ曲線からジニ係数(GiNi)より計算される(1-GiNi)を求めるステップと、
第2の判定基準(DSa)を、前記平均的な傾き(aveS)と前記第3の指標である(1-GiNi)を用いて、下記(式15)により求めるステップと、
前記a[i](iは1からnまでの整数)と前記第2の判定基準(DSa)を比較して、iが1からnまでの範囲で、a[i]≧DSaとなるiがある場合はa[i]≧DSaを満たす最小のiをt
a
、a[i]<DSaの場合はt
a
=nとして、線形バックグラウンド区分区間範囲を示す最大区間区分t
a
を求めるステップと、
隣接する前記区分境界点(BP[j])間の距離ΔBP[j
b
]=BP[j+1]-BP[j](j
b
は1からnまでの整数、jは0からn‐1まで)を求めるステップと、
前記ΔBP[j
b
]に対してK-means法を適用して前記ΔBP[j
b
]を前記距離の短いグループG
a
と長いグループG
b
の2グループに分類するステップと、
ΔBP[n+1]およびΔBP[n+2]の値として、ΔBP[n]と同じ値を割り当てた仮想のΔBP[n+1]およびΔBP[n+2]を作成するステップと、
ΔBP[j
b
]の値が、ΔBP[j
b
+1]の値およびΔBP[j
b
+2]の値と同じ値になる最小のj
b
を求め、該値をj
b、Gamax
とするステップと、
線形バックグラウンド区分区間範囲を示す最大区間区分t
b
をt
b
=j
b、Gamax
として計算するステップと、
前記最大区間区分t、t
a
およびt
b
の内の最頻値をt
c
、またはt、t
a
およびt
b
の値が3つとも異なる場合は、t、t
a
発明の詳細な説明
【技術分野】
【0001】
本発明は、バックグラウンドを取り除いた特性曲線を求める方法に関する。
続きを表示(約 5,600 文字)
【背景技術】
【0002】
べき乗則あるいは指数則に即した物理現象は多い。そして、その法則にしたがった特性関数から導き出される特性指標は、物性評価やそれの産業利用に大変有用である。
ここで、べき乗則に即した特性の指標としては、超電導材料の臨界電流密度Jc、光電子放出(光電効果)閾値、バンドギャップ、指数則に即した特性の指標としては半導体のショットキー閾値を挙げることができる。また、べき乗則の活用としては、特許文献1に開示があるトランジスタの特性劣化予測、および特許文献2に開示がある粘度測定への適用などを挙げることができる。
このため、べき乗則や指数則に従った特性関数は重要であるが、その算出にあたっては、重畳されているバックグラウンド成分の除去と、人為に左右されない自動化された算出方法の確立という2つの課題があった。
【0003】
測定されたデータには様々なバックグラウンド成分が本来の特性曲線に乗っている。バックグラウンドは、その多くが線形成分であるが、それを取り除くことが重要である。従来は、その算出作業を人手で行っていた。しかし、人手では効率が悪いとともに、人為による不確実性、曖昧性が発生していた。
【先行技術文献】
【特許文献】
【0004】
特開2001-352059号公報
特開2022-185568号公報
【非特許文献】
【0005】
Piligrim.C,Picewise-regression(aka segmented regression) in Python,Journal of Open Source Software,6(68),3859(2021)
【発明の概要】
【発明が解決しようとする課題】
【0006】
本発明の課題は、特性関数を算出する際の上記従来の問題を解決し、人為に左右されずに安定に算出され、簡便な方法でありながら、バックグラウンド除去精度の高い特性曲線を求める方法を提供することである。
【課題を解決するための手段】
【0007】
課題を解決するための本発明の構成を下記に示す。
(構成1)
バックグラウンド除去対象の特性関数Y=F(x)に対してセグメント回帰区分線形関数法を適用し、情報量基準により区分、区分数mおよび区分境界点(BP[j])(ここでjは0からmまでの整数、BP[0]はxの最小値、BP[m]はxの最大値)を求めるステップと、
前記情報基準により求められた区分i(iは1からmまでの整数)毎の前記特性関数Y=F(x)の曲線の傾きa[i]およびF(0)を求めるステップと、
a[i]≧a[i+1]を満たすa[i]がある場合は、前記iの最小値をnとし、前記iが1からmまでa[i]<a[i+1]を満たす場合は、n=mとして計算対象の区間を区分nまでの区間として求めるステップと、
第1の指標として、前記区分の1からnまでの区間で、前記Yの最大値Y
max
、最小値Y
min
、前記xの最大値x
max
および最小値x
min
を用いて、(Y
max
-Y
min
)/(x
max
-x
min
)で定義される前記特性関数Y=F(x)の平均的な傾き(aveS)を求めるステップと、
第2の指標として、前記区分の1からnまでの区分を通してのデータ(Y)の値の平均値(D
ave
)と中央値(D
cnt
)の比から非対称性指標(ASY=D
cnt
/D
ave
)を求めるステップと、
判定基準(DS)を前記平均的な傾き(aveS)と前記非対称性指標(ASY)および0.80以上0.95以下の値の中からあらかじめ定めた基準値Lを用いて
0≦ASY<Lの場合 DS=aveS×ASY、
ASY≧Lの場合 DS=aveS
として求めるステップと、
前記傾きa[i](iは1からnまでの整数)の線形成分が、
a[i]<DSの場合はバックグラウンド成分
a[i]≧DSの場合は非バックグラウンド成分として選別判定するステップと、
F(0)および前記バックグラウンド成分を前記特性関数Y=F(x)から減ずるステップ、を含むステップからなる、特性曲線を求める方法。
(構成2)
バックグラウンド除去対象の特性関数Y=F(x)に対してセグメント回帰区分線形関数法を適用し、情報量基準により区分、区分数mおよび区分境界点(BP[j])(ここでjは0からmまでの整数、BP[0]はxの最小値、BP[m]はxの最大値)を求めるステップと、
前記情報基準により求められた区分i(iは1からmまでの整数)毎の前記特性関数Y=F(x)の曲線の傾き(a[i])を前記各区分の始点と終点間の傾きとして求めるステップと、
a[i]≧a[i+1]を満たすa[i]がある場合は、前記iの最小値をnとし、前記iが1からmまでa[i]<a[i+1]を満たす場合は、n=mとして、計算対象の区間を区分nまでの区間として求めるステップと、
第1の指標として、前記区分の1からnまでの区間で、前記Yの最大値Y
max
、最小値Y
min
、前記xの最大値x
max
および最小値x
min
を用いて、(Y
max
-Y
min
)/(x
max
-x
min
)で定義される前記特性関数Y=F(x)の平均的な傾き(aveS)を求めるステップと、
第2の指標として、前記区分の1からnまでの区分を通してのデータ(Y)の値の平均値(D
ave
)と中央値(D
cnt
)の比から、下記(式2)で与えられる非対称性指標(ASY)を計算するステップと、
判定基準(DS)を前記平均的な傾き(aveS)と前記非対称性指標(ASY)および0.80以上0.95以下の値の中からあらかじめ定めた基準値Lを用いて、0≦ASY<Lの場合は下記(式3)、ASY≧Lの場合は下記(式4)により求めるステップと、
前記a[i](iは1からnまでの整数)と前記判定基準(DS)を比較して、iが1からnまでの範囲で、a[i]≧DSとなるiがある場合はa[i]≧DSを満たす最小のiをt、a[i]<DSの場合はt=nとして、線形バックグラウンド区分区間範囲を示す最大区間区分tを求めるステップと、
線形バックグラウンドが取り除かれた特性曲線Y´を下記(式5)から(式7)より求めるステップからなる、特性曲線を求める方法。
aveS=(Y
max
-Y
min
)/(x
max
-x
min
【0008】
(構成6)
バックグラウンド除去対象の特性関数Y=F(x)に対してセグメント回帰区分線形関数法を適用し、情報量基準により区分、区分数mおよび区分境界点(BP[j])(ここでjは0からmまでの整数、BP[0]はxの最小値x
min
、BP[m]はxの最大値x
max
)を求めるステップと、
前記情報基準により求められた区分i(iは1からmまでの整数)毎の前記特性関数Y=F(x)の曲線の傾き(a[i])を前記各区分の始点と終点間の傾きとして求めるステップと、
a[i]≧a[i+1]を満たすa[i]がある場合は、前記iの最小値をnとし、前記iが1からmまでa[i]<a[i+1]を満たす場合は、n=mとして、計算対象の区間を区分nまでの区間として求めるステップと、
第1aの指標として、前記区分の1からnまでの区間で、前記Yの最大値Y
max
、最小値Y
min
、前記xの最大値x
max
および最小値x
min
を用いて、下記(式1a)で定義される前記特性関数Y=F(x)の平均的な傾き(aveS)を求めるステップと、
第2aの指標として、前記x
min
を0、前記x
max
を1、F(x
min
)を0、F(x
max
)を1として(x、Y)を規格化しローレンツ曲線から求めたジニ係数(GiNi)より計算される(1-GiNi)を求めるステップと、
判定基準(DSa)を、前記平均的な傾き(aveS)と前記第2aの指標である(1-GiNi)を用いて、下記(式2a)により求めるステップと、
前記a[i](iは1からnまでの整数)と前記判定基準(DSa)を比較して、iが1からnまでの範囲で、a[i]≧DSaとなるiがある場合はa[i]≧DSaを満たす最小のiをt
a
、a[i]<DSaの場合はt
a
=nとして、線形バックグラウンド区分区間範囲を示す最大区間区分t
a
を求めるステップと、
線形バックグラウンドが取り除かれた特性曲線Ya´を下記(式3a)より求めるステップからなる、特性曲線を求める方法。
aveS=(Y
max
-Y
min
)/(x
max
-x
min
) ・・・(式1a)
DSa=aveS×(1-GiNi) ・・・(式2a)
Ya´=F(x)-F
background,a
・・・(式3a)
JPEG
2024166064000003.jpg
31
147
(構成7)
バックグラウンド除去対象の特性関数Y=F(x)に対してセグメント回帰区分線形関数法を適用し、情報量基準により区分、区分数mおよび区分境界点(BP[j])(ここでjは0からmまでの整数、BP[0]はxの最小値x
min
、BP[m]はxの最大値x
max
)を求めるステップと、
前記情報基準により求められた区分i(iは1からmまでの整数)毎の前記特性関数Y=F(x)の曲線の傾き(a[i])を前記各区分の始点と終点間の傾きとして求めるステップと、
a[i]≧a[i+1]を満たすa[i]がある場合は、前記iの最小値をnとし、前記iが1からmまでa[i]<a[i+1]を満たす場合は、n=mとして、計算対象の区間を区分nまでの区間として求めるステップと、
隣接する前記区分境界点(BP[j])間の距離ΔBP[j
b
]=BP[j+1]-BP[j](j
b
は1からnまでの整数、jは0からn‐1まで)を求めるステップと、
前記ΔBP[j
b
]に対してK-means法を適用して前記ΔBP[j
b
]を前記距離の短いグループG
a
と長いグループG
b
の2グループに分類するステップと、
幅ΔBP[j
b
]が前記グループGaに属するときは0を、前記グループGbに属するときは1を区分BD[j
b
]の値として割り当てるステップと、
ΔBP[n+1]およびΔBP[n+2]の値として、ΔBP[n]と同じ値を割り当てた仮想のΔBP[n+1]およびΔBP[n+2]を作成するステップと、
ΔBP[j
b
]の値が、ΔBP[j
【発明の効果】
【0009】
本発明によれば、人為に左右されずに安定に算出され、簡便な方法でありながら、バックグラウンド除去精度の高い特性曲線を求める方法が提供される。
【図面の簡単な説明】
【0010】
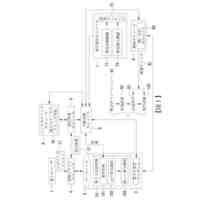
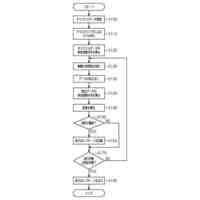
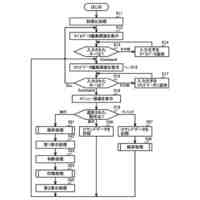
本発明の第1の処理フローを示すフローチャート図である。
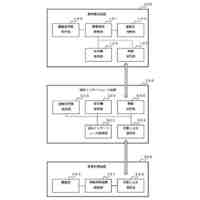
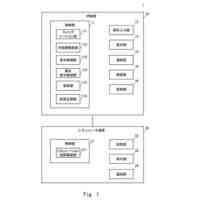
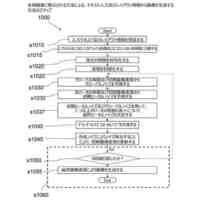
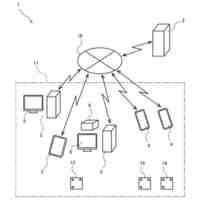
本発明で使用する処理装置の構成を示す構成図である。
本発明の第2の処理フローを示すフローチャート図である。
臨界電流密度関数に対してセグメント回帰区分線形関数法を適用して区分を行った例を示す特性図である。
臨界電流密度測定データに対して本発明の方法を適用してバックグラウンド成分を除去した例である。
本発明の第3の処理フローを示すフローチャート図である。
本発明の第4の処理フローを示すフローチャート図である。
実施例3による臨界電流密度測定データに対して本発明の方法を適用してバックグラウンド成分を除去した例である。
臨界電流密度測定データに対してバックグラウンド成分を、(a)はBP[1]区分境界点まで、(b)はBP[2]区分境界点まで除去した例で、(c)は両者を比較した図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
非正規コート
12日前
個人
人物再現システム
9日前
個人
AI飲食最適化プラグイン
2日前
キヤノン電子株式会社
通信システム
23日前
有限会社ノア
データ読取装置
10日前
個人
電話管理システム及び管理方法
3日前
株式会社ザメディア
出席管理システム
17日前
個人
広告提供システムおよびその方法
12日前
個人
日誌作成支援システム
9日前
トヨタ自動車株式会社
作業評価装置
23日前
トヨタ自動車株式会社
工程計画装置
17日前
ミサワホーム株式会社
情報処理装置
16日前
トヨタ自動車株式会社
作業判定方法
18日前
個人
ポイント還元付き配送システム
10日前
株式会社タクテック
商品取出集品システム
16日前
オベック実業株式会社
接続構造
9日前
ゼネラル株式会社
RFIDタグ付き物品
19日前
個人
公益寄付インタラクティブシステム
23日前
株式会社村田製作所
動き検知装置
16日前
トヨタ自動車株式会社
情報処理システム
18日前
株式会社ドクター中松創研
生成AIの適切使用法
9日前
株式会社実身美
ワーキングシェアリングシステム
10日前
株式会社国際電気
支援システム
19日前
個人
コンテンツ配信システム
16日前
トヨタ自動車株式会社
情報処理方法
18日前
富士フイルム株式会社
タッチセンサ
23日前
富士通株式会社
画像生成方法
22日前
株式会社エスシーシー
置き配システム
10日前
ブラザー工業株式会社
ラベルプリンタ
18日前
株式会社デンソー
情報処理方法
23日前
個人
プラットフォームシステム
16日前
甍エンジニアリング株式会社
屋根材買い取りシステム
22日前
株式会社 喜・扇
緊急事態対応円滑化システム
9日前
トヨタ自動車株式会社
作業支援システム
16日前
個人
注文管理システム及び注文管理プログラム
9日前
株式会社K-model
運用設計資料作成装置
12日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ