TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024165154
公報種別
公開特許公報(A)
公開日
2024-11-28
出願番号
2023081067
出願日
2023-05-16
発明の名称
符号化システム、点群符号化装置、符号化方法、及びコンピュータプログラム
出願人
キヤノン株式会社
代理人
個人
,
個人
,
個人
主分類
G06T
9/00 20060101AFI20241121BHJP(計算;計数)
要約
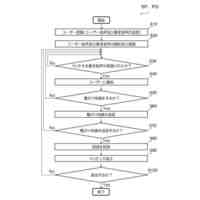
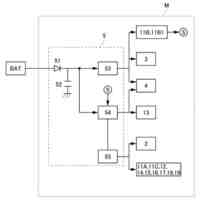
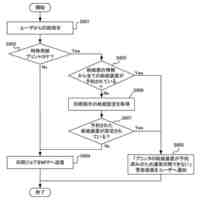
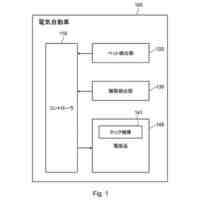
【課題】画像の符号化処理と点群の符号化処理とを行うと共に、点群符号化処理の演算量を低減可能にした符号化システム或いは符号化方法を提供する。
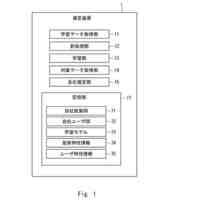
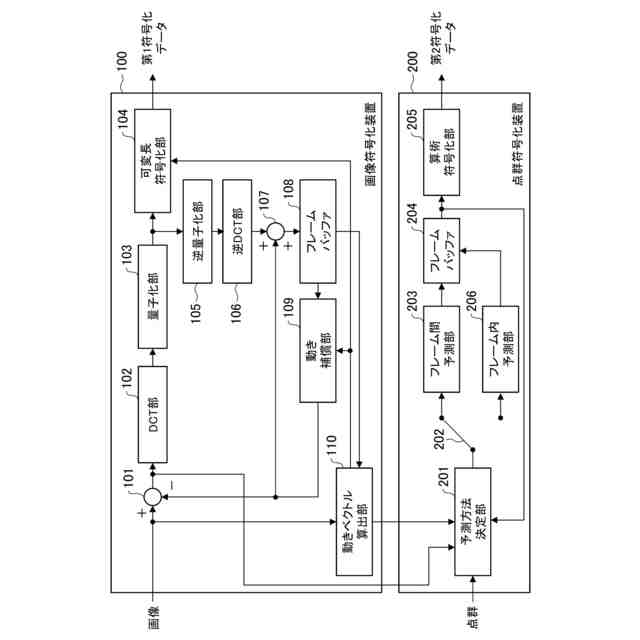
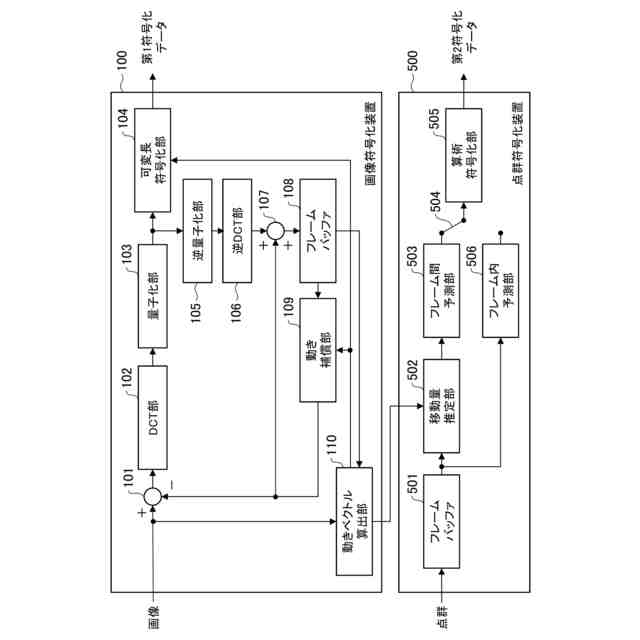
【解決手段】符号化システムにおいて、画像を符号化するための第1の符号化手段と、点群を符号化するための第2の符号化手段と、を有する。第2の符号化手段は、第1の符号化手段において符号化処理に用いられた情報、例えば動きベクトルの大きさ等に基づいて、符号化処理を行うことにより点群符号化処理の演算量を削減する。
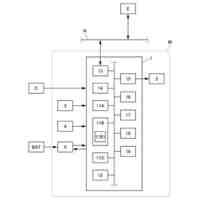
【選択図】図1
特許請求の範囲
【請求項1】
画像を符号化する第1の符号化手段と、
点群を符号化する第2の符号化手段を有し、
前記第1の符号化手段において符号化処理に用いられた情報に基づいて、前記第2の符号化手段は符号化処理を行う事を特徴とする符号化システム。
続きを表示(約 1,000 文字)
【請求項2】
前記第2の符号化手段は、前記第1の符号化手段から出力された動きベクトルに基づいて、符号化対象点の参照点を決定する事を特徴とする請求項1に記載の符号化システム。
【請求項3】
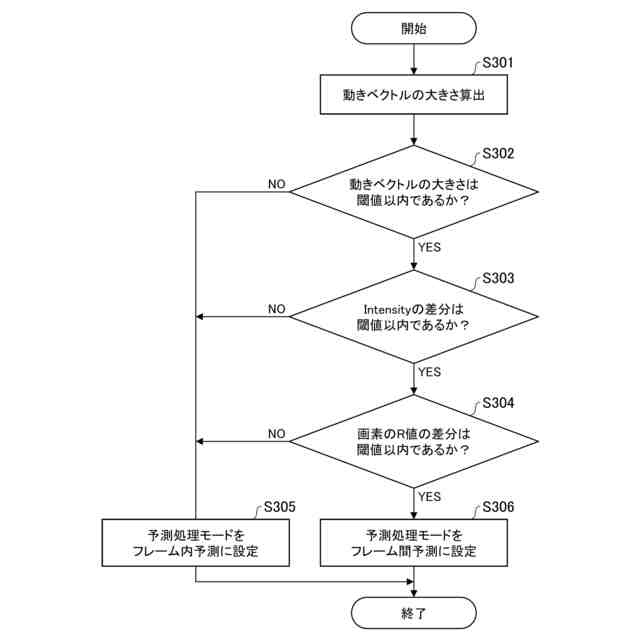
前記第2の符号化手段は、前記第1の符号化手段から出力された動きベクトルの大きさに基づいて、フレーム間予測又はフレーム内予測のいずれか一方を選択する事を特徴とする請求項1に記載の符号化システム。
【請求項4】
前記第2の符号化手段は、前記符号化対象点と前記参照点のIntensity値の差分に基づいて、フレーム間予測又はフレーム内予測のいずれか一方を選択する事を特徴とする請求項2に記載の符号化システム。
【請求項5】
前記第2の符号化手段は、前記符号化対象点の画素と前記参照点の画素のR値の差分に基づいて、フレーム間予測又はフレーム内予測のいずれか一方を選択する事を特徴とする請求項2に記載の符号化システム。
【請求項6】
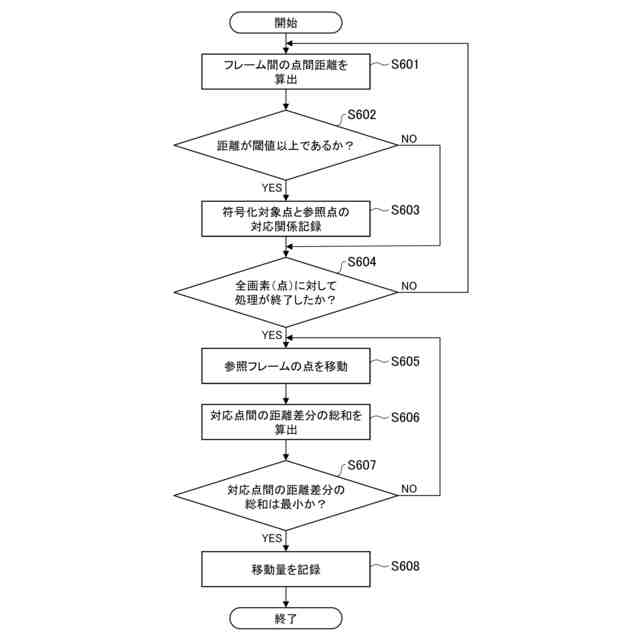
前記第2の符号化手段は、フレームの間の点の対応関係からフレーム間の点群全体の移動量を算出することを特徴とする請求項2に記載の符号化システム。
【請求項7】
前記第2の符号化手段は、前記符号化対象点と前記参照点の間の距離差分が最小となる、フレーム間の点群全体の前記移動量を算出することを特徴とする請求項6に記載の符号化システム。
【請求項8】
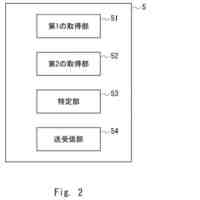
点群情報を取得する第1の取得手段と、
画像を符号化する第1の符号化手段が、当該符号化に用いた第1情報を取得する第2の取得手段と、
前記第1情報に基づいて、前記点群情報の符号化処理を行う符号化手段と、
を有することを特徴とする点群符号化装置。
【請求項9】
画像を符号化する第1の符号化ステップと、
点群を符号化する第2の符号化ステップと、を有し、
前記第1の符号化ステップにおいて符号化処理に用いられた情報に基づいて、前記第2の符号化ステップは前記点群の符号化処理を行う事を特徴とする符号化方法。
【請求項10】
請求項1~7のいずれか1項に記載の符号化システム又は請求項8に記載の点群符号化装置の各手段をコンピュータにより制御するためのコンピュータプログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、符号化システム、点群符号化装置、符号化方法、及びコンピュータプログラム等に関するものである。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
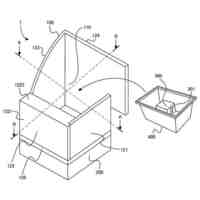
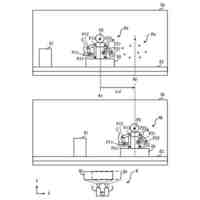
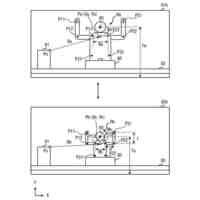
近年自動運転車両に代表される、カメラ及びレーザースキャナを搭載したセンシングシステムが提案されている。このようなシステムでは、カメラによって2次元画像が取得され、レーザースキャナによって3次元点群が計測される。
【0003】
各種センサによって取得された情報は、データ伝送のため、夫々に適した方式で符号化される。例えば、2次元画像の符号化に対しては、MPEG2、H.264(H.264/MPEG-4 AVC)といった符号化方式が提案されている。
【0004】
一方、例えば点群のような3次元構造を表す3Dデータの符号化方式としては、MPEG(Moving Picture Experts Group)により、G-PCC codec description v2が策定されつつある(非特許文献1)。
【0005】
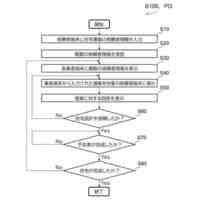
G-PCCでは、フレーム間予測手法として、例えば以下の手法が提案されている。即ち、フレーム間において、レーザーの走査位置が近い点の距離変化が少ない場合に、1つ前のフレームの同じレーザー番号で現在の方位角に最も近い方位角を持つ点との距離差分を符号化する手法が提案されている。この手法は、フレーム間において同位置の点の距離変化が小さい場合に符号化効率が高い。
【0006】
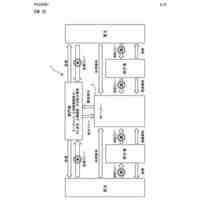
又、LiDAR(Light Detection And Ranging)等を移動体に設置して計測した3次元点群に対しては、フレーム間における点群全体の移動量を使用する手法が提案されている。
【0007】
この手法では、1つ前のフレームの点群位置及び姿勢と、現在のフレームの点群位置及び姿勢から、フレーム間における点群全体の移動量(例えば、回転、並進で表わされる動きパラメータ)を推定する。
【0008】
そして、1つ前のフレームの点群位置に対して、推定した移動量を加味した各点の位置と、現在のフレームの点群中の各点の位置の差分値を符号化する。LiDARを移動体に設置して、移動体の周囲を計測した場合、道路領域に代表される平面上の点は、移動体の移動量に係わらずほぼ一定の距離が計測される。このため、この方式は主に道路以外の静止物体に対して符号化効率が高い。
【先行技術文献】
【非特許文献】
【0009】
G-PCC codec description v2、ISO/IEC MPEG (JTC 1/SC 29/WG11)、N18189
Lipu Zhou,Automatic Extrinsic Calibration of a Camera and a 3D LiDAR Using Line and Plane Correspondences,IEEE/RSJ IROS
【発明の概要】
【発明が解決しようとする課題】
【0010】
しかしながら、上述の非特許文献に開示された従来技術では、フレーム内予測とフレーム間予測の2つの予測モードの結果に基づき一方の予測モードを選択している。又、フレーム間の動きを推定するために、例えばICP(Iterative Closest Point)アルゴリズムを用いる必要があり、演算量が増加するという課題がある。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
情報提示方法
1か月前
個人
アカウントマップ
27日前
個人
プログラム
26日前
個人
RFタグ読取装置
1か月前
個人
プログラム
1か月前
個人
自動精算システム
1か月前
個人
売買システム
1か月前
個人
管理サーバ
2か月前
個人
発想支援方法及びシステム
1か月前
個人
市場受発注システム
1か月前
個人
学習装置及び推論装置
26日前
日本精機株式会社
車両用表示装置
1か月前
日本精機株式会社
車両用表示装置
1か月前
個人
分類処理プログラム及び方法
1か月前
個人
案件管理装置および端末装置
13日前
個人
VRによる人体各部位の立体化
2か月前
株式会社発明屋
電池指向の構造設計
20日前
富士通株式会社
金融システム
1か月前
井関農機株式会社
ロボット作業車両
1か月前
キヤノン株式会社
情報処理装置
2か月前
トヨタ自動車株式会社
管理装置
21日前
トヨタ自動車株式会社
推定装置
2か月前
個人
ダブルオークションシステム
9日前
トヨタ自動車株式会社
電気自動車
5日前
株式会社イズミ
総合代行システム
9日前
株式会社プレニーズ
仲介システム
27日前
富士通株式会社
プロセッサ
19日前
トヨタ自動車株式会社
作業評価装置
1か月前
ブラザー工業株式会社
無線通信装置
1か月前
トヨタ自動車株式会社
作業管理装置
1か月前
村田機械株式会社
人員配置システム
1か月前
トヨタ自動車株式会社
記号識別方法
2か月前
個人
販売支援システム
1か月前
個人
情報処理装置およびプログラム
2か月前
富士通株式会社
予測
12日前
トヨタ自動車株式会社
作業評価装置
2か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ