TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024160826
公報種別
公開特許公報(A)
公開日
2024-11-15
出願番号
2023076233
出願日
2023-05-02
発明の名称
モデル学習装置、制御装置、モデル学習方法、および、コンピュータプログラム
出願人
株式会社豊田中央研究所
,
株式会社豊田自動織機
代理人
個人
,
個人
主分類
G05B
13/02 20060101AFI20241108BHJP(制御;調整)
要約
【課題】 システムにおける入力と出力との関係を表すモデルを学習するモデル学習装置において、システムを安定的に制御可能なモデルを学習することができる技術を提供する。
【解決手段】 モデル学習装置は、入力変数vを用いて出力変数yを予測するための非線形の状態方程式の学習に用いられるモデルを記憶するモデル記憶部と、モデル記憶部に記憶されているモデルと、モデルに対する入力変数データと出力変数データの組を複数含んだ入出力データセットと、を用いて状態方程式を学習する学習部と、を備え、モデルは、入力変数vを入力とする全単射な写像Ψと、出力変数yを入力とする全単射な写像Φと、を含む状態方程式であり、写像Ψは、入力変数vの成分の少なくとも1つが0であるとき、出力成分の少なくとも1つが0となり、写像Φは、出力変数yの成分の少なくとも1つが0であるとき、出力成分の少なくとも1つが0となる。
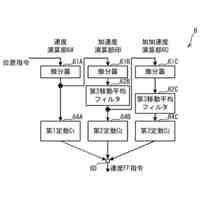
【選択図】 図1
特許請求の範囲
【請求項1】
システムに入力される入力変数v(ベクトル)と、前記システムから出力される出力変数y(ベクトル)との関係を表すモデルを学習するモデル学習装置であって、
前記入力変数vを用いて前記出力変数yを予測するための非線形の状態方程式の学習に用いられるモデルを記憶するモデル記憶部と、
前記モデル記憶部に記憶されているモデルと、前記モデルに対する入力変数データと出力変数データの組を複数含んだ入出力データセットと、を用いて前記状態方程式を学習する学習部と、
を備え、
前記モデルは、前記入力変数vを入力とする全単射な写像Ψと、前記出力変数yを入力とする全単射な写像Φと、を含む状態方程式であり、
前記写像Ψは、前記入力変数vの成分の少なくとも1つが0であるとき、出力成分の少なくとも1つが0となり、
前記写像Φは、前記出力変数yの成分の少なくとも1つが0であるとき、出力成分の少なくとも1つが0となる、
モデル学習装置。
続きを表示(約 5,000 文字)
【請求項2】
請求項1に記載のモデル学習装置であって、
前記モデルは、式(1)によって定義され、
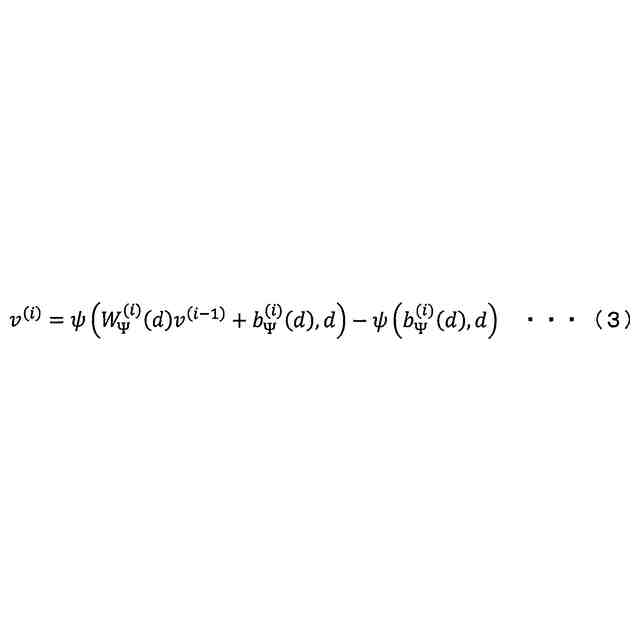
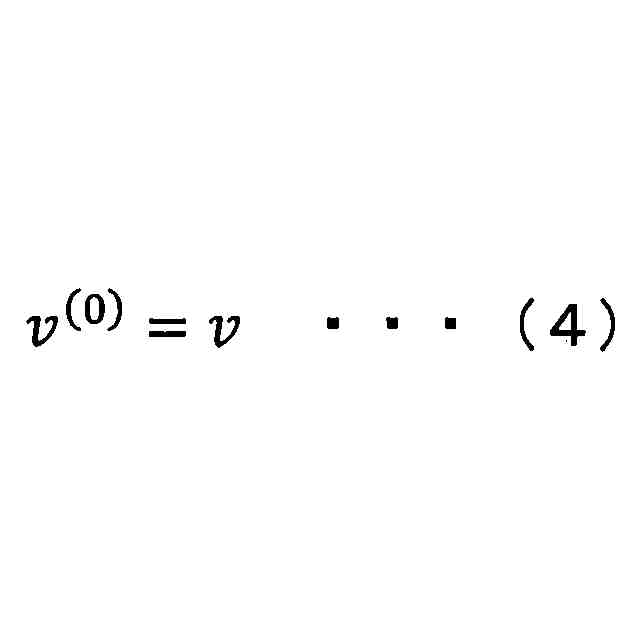
前記写像Ψは、多層ニューラルネットワークを表す式(2)~式(4)によって定義され、
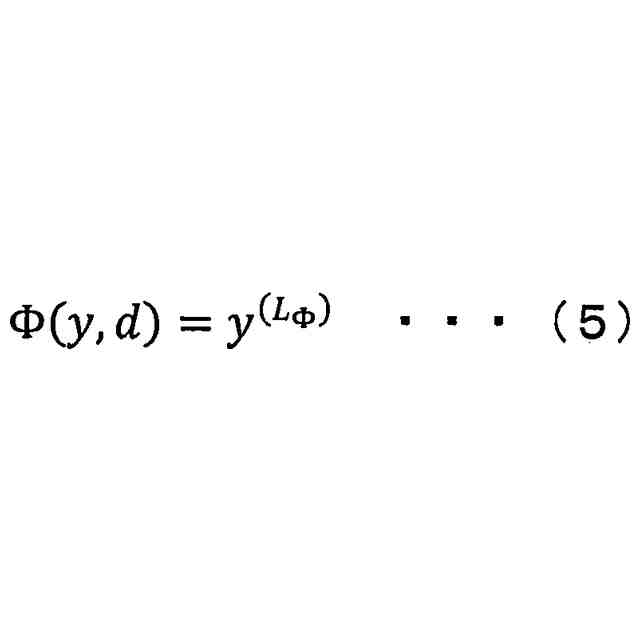
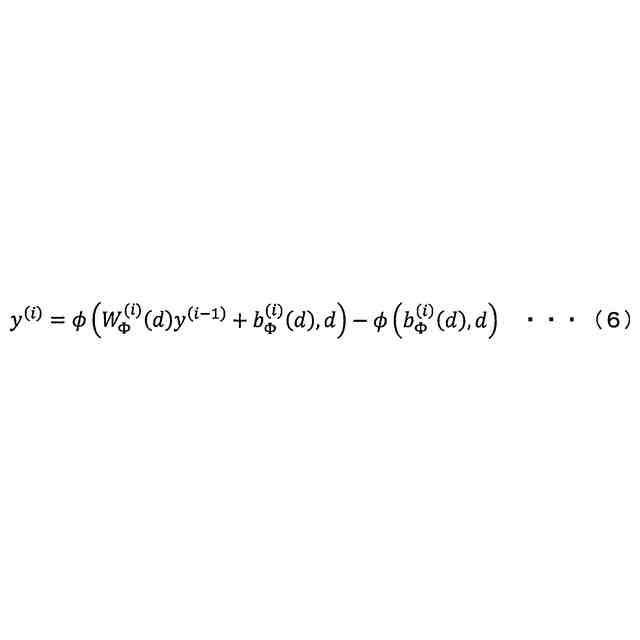
前記写像Φは、多層ニューラルネットワークを表す式(5)~式(7)によって定義される、
モデル学習装置。
TIFF
2024160826000084.tif
14
170
上記式(1)において、
等号の左辺は、前記出力変数yを表すn(nは整数)次元ベクトルの時間微分であり、
等号の右辺のうち、
前記入力変数vは、前記出力変数yの変化に影響を与える制御可能な入力を示すn次元ベクトルであり、
外生入力dは、前記出力変数yの変化に影響を与える制御不可能な入力を示すp(pは整数)次元ベクトルであり、
前記写像Ψは、前記入力変数vと前記外生入力dを入力としてn次元のベクトルを返す関数であって、かつ、前記入力変数vについて全単射な写像であり、
前記写像Φは、前記出力変数yと前記外生入力dを入力としてn次元のベクトルを返す関数であって、かつ、前記出力変数yについて全単射な写像であり、
関数Aは、前記外生入力dを入力として、n×n行列を返す関数であり、
TIFF
2024160826000085.tif
10
170
TIFF
2024160826000086.tif
11
170
TIFF
2024160826000087.tif
9
170
上記式(2)~式(4)において、
添え字iは、多層ニューラルネットワークにおける層の番号を表し、
添え字L
Ψ
は、多層ニューラルネットワークの層数を表し、
重みW
Ψ
は、多層ニューラルネットワークにおける前記入力変数vの入力次元をn次元とする場合、n×n行列で表され、
バイアスb
Ψ
は、多層ニューラルネットワークにおける前記入力変数vの入力次元をn次元とする場合、n次元ベクトルで表され、
活性化関数ψは、第一引数である、W
Ψ
(i)
(d)y
(i-1)
+b
Ψ
(i)
(d)、または、b
Ψ
(i)
(d)について同相写像となるものであり、
TIFF
2024160826000088.tif
10
170
TIFF
2024160826000089.tif
12
170
TIFF
2024160826000090.tif
11
170
上記式(5)~式(7)において、
添え字iは、多層ニューラルネットワークにおける層の番号を表し、
添え字L
Φ
は、多層ニューラルネットワークの層数を表し、
重みW
Φ
は、多層ニューラルネットワークにおける前記出力変数yの入力次元をn次元とする場合、n×n行列で表され、
バイアスb
Φ
は、多層ニューラルネットワークにおける前記出力変数yの入力次元をn次元とする場合、n次元ベクトルで表され、
活性化関数φは、第一引数である、W
Φ
(i)
(d)y
(i-1)
+b
Φ
(i)
(d)、または、b
Φ
(i)
(d)について同相写像となるものである。
【請求項3】
請求項1に記載のモデル学習装置であって、
前記モデルは、式(1)によって定義され、
前記写像Ψは、中間層が式(9)および式(10)の少なくとも一方によって表される多層ニューラルネットワークを表す式(8)~式(11)によって定義され、
前記写像Φは、中間層が式(13)および式(14)の少なくとも一方によって表される多層ニューラルネットワークを表す式(12)~式(15)によって定義される、
モデル学習装置。
TIFF
2024160826000091.tif
13
170
上記式(1)において、
等号の左辺は、前記出力変数yを表すn(nは整数)次元ベクトルの時間微分であり、
等号の右辺のうち、
前記入力変数vは、前記出力変数yの変化に影響を与える制御可能な入力を示すn次元ベクトルであり、
外生入力dは、前記出力変数yの変化に影響を与える制御不可能な入力を示すp(pは整数)次元ベクトルであり、
前記写像Ψは、前記入力変数vと前記外生入力dを入力としてn次元のベクトルを返す関数であって、かつ、前記入力変数vについて全単射な写像であり、
前記写像Φは、前記出力変数yと前記外生入力dを入力としてn次元のベクトルを返す関数であって、かつ、前記出力変数yについて全単射な写像であり、
関数Aは、前記外生入力dを入力として、n×n行列を返す関数であり、
TIFF
2024160826000092.tif
17
170
TIFF
2024160826000093.tif
21
170
TIFF
2024160826000094.tif
21
170
TIFF
2024160826000095.tif
13
170
上記式(8)~式(11)において、
添え字iは、多層ニューラルネットワークにおける層の番号を表し、
添え字L
Ψ
は、多層ニューラルネットワークの層数を表し、
前記入力変数vをn
a
(n
a
は整数)次元の入力変数v
a
とn
b
(n
b
は整数)次元の入力変数v
b
とに分割した場合、
重みW
Ψa
は、n
a
×n
a
次元行列であり、
バイアスb
Ψa
は、n
a
次元ベクトルであり、
重みW
Ψb
は、n
a
×n
b
次元行列であり、
バイアスb
Ψb
は、n
b
次元ベクトルであり、
活性化関数ψは、第一引数である、W
Ψa
(i)
(d)v
a
(i-1)
+b
Ψa
(i)
、b
Ψa
(i)
、または、W
Ψb
(i)
(d)v
b
(i-1)
+b
【請求項4】
請求項2または請求項3に記載のモデル学習装置であって、
前記学習部は、前記式(1)において、内部変数uを用いた式(16)で前記写像Ψを定義し、内部変数xを用いた式(17)で前記写像Φを定義することで、式(18)によって定義される前記状態方程式を学習する、
モデル学習装置。
TIFF
2024160826000100.tif
11
170
TIFF
2024160826000101.tif
9
170
TIFF
2024160826000102.tif
10
170
【請求項5】
請求項4に記載のモデル学習装置であって、
前記学習部は、式(16)を離散時刻kの時間ステップで離散化した式(19)とし、式(17)を離散時刻kの時間ステップで離散化した式(20)とすることで、式(18)を離散時刻kの時間ステップで離散化した式(21)に示す状態方程式を学習する、
モデル学習装置。
TIFF
2024160826000103.tif
9
170
TIFF
2024160826000104.tif
10
170
TIFF
2024160826000105.tif
10
170
上記式(21)において、関数A´は、前記関数Aと同次元の行列である。
【請求項6】
請求項2または請求項3に記載のモデル学習装置であって、
前記学習部は、
前記モデルに対して、前記入出力データセットのうちの前記入力変数データのセットを与えて出力を推定し、
推定された出力と、前記入出力データセットのうちの前記出力変数データのセットと、の一致度を評価し、
評価の結果に応じて前記モデルの学習パラメータを更新することで、前記状態方程式を学習する、
モデル学習装置。
【請求項7】
システムを制御する制御装置であって、
請求項1から請求項3のいずれか一項に記載のモデル学習装置と、
前記学習部が学習した前記状態方程式を用いて、前記出力変数yの目標値に対応する前記入力変数vの目標値を決定する決定部と、
前記決定部によって決定される前記入力変数vの目標値を入力することで前記システムを制御する制御部と、を備える、
制御装置。
【請求項8】
システムに入力される入力変数v(ベクトル)と、前記システムから出力される出力変数y(ベクトル)との関係を表すモデルをモデル学習装置によって学習するモデル学習方法であって、
前記入力変数vを用いて前記出力変数yを予測するための非線形の状態方程式の学習に用いられるモデルを取得する取得工程と、
前記取得工程において取得した前記モデルと、前記モデルに対する入力変数データと出力変数データの組を複数含んだ入出力データセットと、を用いて前記状態方程式を学習する学習工程と、
を備え、
前記モデルは、前記入力変数vを入力とする全単射な写像Ψと、前記出力変数yを入力とする全単射な写像Φと、を含む状態方程式であり、
前記写像Ψは、前記入力変数vの成分の少なくとも1つが0であるとき、出力成分の少なくとも1つが0となり、
前記写像Φは、前記出力変数yの成分の少なくとも1つが0であるとき、出力成分の少なくとも1つが0となる、
モデル学習方法。
【請求項9】
システムに入力される入力変数v(ベクトル)と、前記システムから出力される出力変数y(ベクトル)との関係を表すモデルの学習を情報処理装置に実行させるコンピュータプログラムであって、
前記入力変数vを用いて前記出力変数yを予測するための非線形の状態方程式の学習に用いられるモデルを取得する取得機能と、
前記取得機能によって取得する前記モデルと、前記モデルに対する入力変数データと出力変数データの組を複数含んだ入出力データセットと、を用いて前記状態方程式を学習す
る学習機能と、を前記情報処理装置に実行させ、
前記モデルは、前記入力変数vを入力とする全単射な写像Ψと、前記出力変数yを入力とする全単射な写像Φと、を含む状態方程式であり、
前記写像Ψは、前記入力変数vの成分の少なくとも1つが0であるとき、出力成分の少なくとも1つが0となり、
前記写像Φは、前記出力変数yの成分の少なくとも1つが0であるとき、出力成分の少なくとも1つが0となる、
コンピュータプログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、モデル学習装置、制御装置、モデル学習方法、および、コンピュータプログラムに関する。
続きを表示(約 5,700 文字)
【背景技術】
【0002】
従来から、システムを制御するための入力と、この入力に対するシステムからの出力との関係を表すモデルを学習するモデル学習装置が知られている。例えば、特許文献1には、出力が所定の領域内におさまるように、入力を変換する全単射な写像を含むモデルを学習する技術が開示されている。特許文献2には、入出力を変換する2つの全単射な写像と線形の動的方程式とを含むモデルを学習するモデル学習装置が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2022-016709号公報
特開2021-189934号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上述したような先行技術によっても、モデル学習装置において、システムを安定的に制御可能なモデルを学習する技術については、なお改善の余地があった。例えば、特許文献1と特許文献2とのいずれにも、モデル学習装置が学習するモデルに含まれる全単射な写像が、入力成分が0であったときに対応する出力成分の値が0となることは、記載されていない。このため、特許文献1に記載のモデル学習装置によって学習されるモデル、および、特許文献2に記載のモデル学習装置によって学習されるモデルでは、入力成分が0になっても対応する出力成分が0とならないおそれがある。このようなモデルを用いてシステムを制御すると、システムが不安定になるおそれがある。
【0005】
本発明は、上述した課題を解決するためになされたものであり、システムにおける入力と出力との関係を表すモデルを学習するモデル学習装置において、システムを安定的に制御可能なモデルを学習することができる技術を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明は、上述の課題を解決するためになされたものであり、以下の形態として実現できる。
【0007】
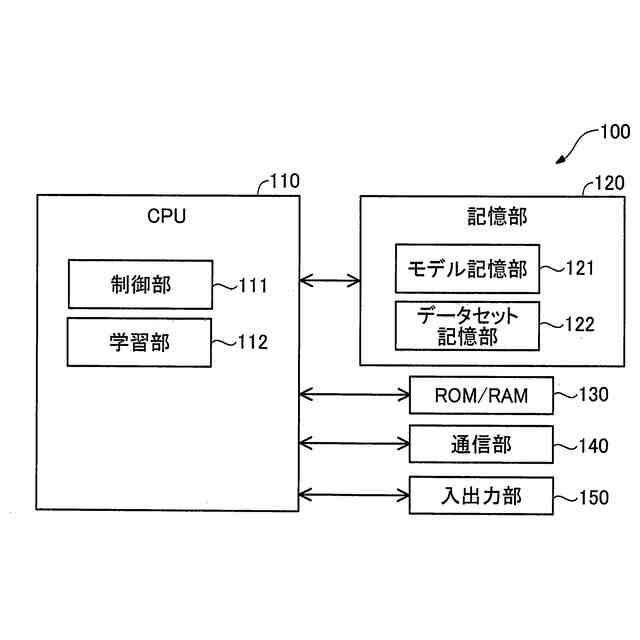
(1)本発明の一形態によれば、システムに入力される入力変数v(ベクトル)と、前記システムから出力される出力変数y(ベクトル)との関係を表すモデルを学習するモデル学習装置が提供される。このモデル学習装置は、前記入力変数vを用いて前記出力変数yを予測するための非線形の状態方程式の学習に用いられるモデルを記憶するモデル記憶部と、前記モデル記憶部に記憶されているモデルと、前記モデルに対する入力変数データと出力変数データの組を複数含んだ入出力データセットと、を用いて前記状態方程式を学習する学習部と、を備え、前記モデルは、前記入力変数vを入力とする全単射な写像Ψと、前記出力変数yを入力とする全単射な写像Φと、を含む状態方程式であり、前記写像Ψは、前記入力変数vの成分の少なくとも1つが0であるとき、出力成分の少なくとも1つが0となり、前記写像Φは、前記出力変数yの成分の少なくとも1つが0であるとき、出力成分の少なくとも1つが0となる。
【0008】
この構成によれば、モデルは、システムに入力される入力変数vを入力とする全単射な写像Ψと、システムから出力される出力変数yを入力とする全単射な写像Φと、を含む状態方程式である。このような状態方程式は、写像Ψ,Φのそれぞれを内部変数とすることで、線形化することができるため、非線形な構造をしているモデルであっても、出力の目標を達成する最適な入力を求める最適制御問題の解が一意であることを保証することができる。また、写像Ψは、入力変数vの成分の少なくとも1つが0であるとき、出力成分の少なくとも1つが0となり、写像Φは、出力変数yの成分の少なくとも1つが0であるとき、出力成分の少なくとも1つが0となる。これにより、写像Ψ,Φのそれぞれを含む状態方程式は、特定の入力成分が0となったときに、対応する出力成分が0となることが保証される。したがって、モデル学習装置は、システムを安定的に制御可能なモデルを学習することができる。
【0009】
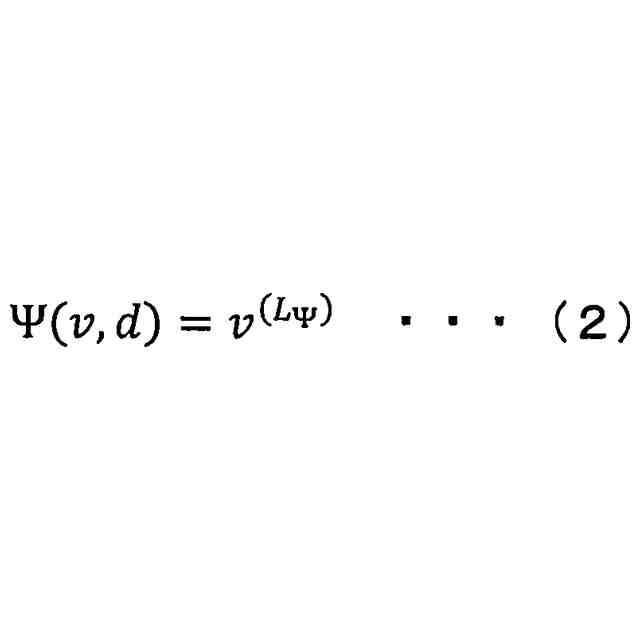
(2)上記形態のモデル学習装置において、前記モデルは、式(1)によって定義され、前記写像Ψは、多層ニューラルネットワークを表す式(2)~式(4)によって定義され、前記写像Φは、多層ニューラルネットワークを表す式(5)~式(7)によって定義されてもよい。
TIFF
2024160826000002.tif
15
170
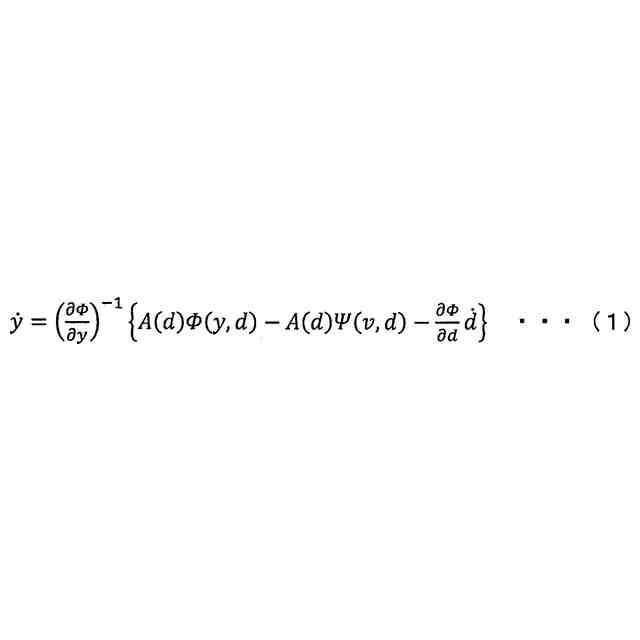
上記式(1)において、等号の左辺は、前記出力変数yを表すn(nは整数)次元ベクトルの時間微分であり、等号の右辺のうち、前記入力変数vは、前記出力変数yの変化に影響を与える制御可能な入力を示すn次元ベクトルであり、外生入力dは、前記出力変数yの変化に影響を与える制御不可能な入力を示すp(pは整数)次元ベクトルであり、前記写像Ψは、前記入力変数vと前記外生入力dを入力としてn次元のベクトルを返す関数であって、かつ、前記入力変数vについて全単射な写像であり、前記写像Φは、前記出力変数yと前記外生入力dを入力としてn次元のベクトルを返す関数であって、かつ、前記出力変数yについて全単射な写像であり、関数Aは、前記外生入力dを入力として、n×n行列を返す関数である。
TIFF
2024160826000003.tif
12
170
TIFF
2024160826000004.tif
15
170
TIFF
2024160826000005.tif
11
170
上記式(2)~式(4)において、添え字iは、多層ニューラルネットワークにおける層の番号を表し、添え字L
Ψ
は、多層ニューラルネットワークの層数を表し、重みW
Ψ
は、多層ニューラルネットワークにおける前記入力変数vの入力次元をn次元とする場合、n×n行列で表され、バイアスb
Ψ
は、多層ニューラルネットワークにおける前記入力変数vの入力次元をn次元とする場合、n次元ベクトルで表され、活性化関数ψは、第一引数である、W
Ψ
(i)
(d)y
(i-1)
+b
Ψ
(i)
(d)、または、b
Ψ
(i)
(d)について同相写像となるものである。
TIFF
2024160826000006.tif
11
170
TIFF
2024160826000007.tif
14
170
TIFF
2024160826000008.tif
12
170
上記式(5)~式(7)において、添え字iは、多層ニューラルネットワークにおける層の番号を表し、添え字L
Φ
は、多層ニューラルネットワークの層数を表し、重みW
Φ
は、多層ニューラルネットワークにおける前記出力変数yの入力次元をn次元とする場合、n×n行列で表され、バイアスb
Φ
は、多層ニューラルネットワークにおける前記出力変数yの入力次元をn次元とする場合、n次元ベクトルで表され、活性化関数φは、第一引数である、W
Φ
(i)
(d)y
(i-1)
+b
Φ
(i)
(d)、または、b
Φ
(i)
(d)について同相写像となるものである。この構成によれば、式(1)のモデルに含まれる写像Ψ、Φのそれぞれには、出力変数yの変化に影響を与える制御不可能な入力である外生入力dが含まれている。これにより、式(1)のモデルは、制御不可能な外生入力dによる影響も考慮した状態方程式となるため、このようなモデルを用いることで、システムの将来の状態を高精度に予測することができる。また、式(2)~式(4)によって定義される多層ニューラルネットワークによって表される写像Ψは、多層ニューラルネットワークの中間層を表す式(3)において、入力変数v
(i-1)
が0になると、入力変数v
(i)
も0となる。すなわち、写像Ψの出力も0となる。また、式(5)~式(7)によって定義される多層ニューラルネットワークによって表される写像Φは、多層ニューラルネットワークの中間層を表す式(6)において、出力変数y
(i-1)
が0になると、出力変数y
(i)
も0となる。すなわち、写像Φの出力も0となる。式(1)のモデルは、式(2)~式(4)によって表される写像Ψと、式(5)~式(7)によって表される写像Φとを含むため、特定の入力変数が0となったときに、対応する出力変数が0となることが保証される。したがって、モデル学習装置は、システムを安定的に制御可能なモデルを学習することができる。
【0010】
(3)上記形態のモデル学習装置において、前記モデルは、式(1)によって定義され、前記写像Ψは、中間層が式(9)および式(10)の少なくとも一方によって表される多層ニューラルネットワークを表す式(8)~式(11)によって定義され、前記写像Φは、中間層が式(13)および式(14)の少なくとも一方によって表される多層ニューラルネットワークを表す式(12)~式(15)によって定義されてもよい。
TIFF
2024160826000009.tif
14
170
上記式(1)において、等号の左辺は、前記出力変数yを表すn(nは整数)次元ベクトルの時間微分であり、等号の右辺のうち、前記入力変数vは、前記出力変数yの変化に影響を与える制御可能な入力を示すn次元ベクトルであり、外生入力dは、前記出力変数yの変化に影響を与える制御不可能な入力を示すp(pは整数)次元ベクトルであり、前記写像Ψは、前記入力変数vと前記外生入力dを入力としてn次元のベクトルを返す関数であって、かつ、前記入力変数vについて全単射な写像であり、前記写像Φは、前記出力変数yと前記外生入力dを入力としてn次元のベクトルを返す関数であって、かつ、前記出力変数yについて全単射な写像であり、関数Aは、前記外生入力dを入力として、n×
n行列を返す関数である。
TIFF
2024160826000010.tif
17
170
TIFF
2024160826000011.tif
23
170
TIFF
2024160826000012.tif
22
170
TIFF
2024160826000013.tif
14
170
上記式(8)~式(11)において、添え字iは、多層ニューラルネットワークにおける層の番号を表し、添え字L
Ψ
は、多層ニューラルネットワークの層数を表し、前記入力変数vをn
a
(n
a
は整数)次元の入力変数v
a
とn
b
(n
b
は整数)次元の入力変数v
b
とに分割した場合、重みW
Ψa
は、n
a
×n
a
次元行列であり、バイアスb
Ψa
は、n
a
次元ベクトルであり、重みW
Ψb
は、n
a
×n
b
次元行列であり、バイアスb
Ψb
は、n
b
次元ベクトルであり、活性化関数ψは、第一引数である、W
Ψa
(i)
(d)v
a
(i-1)
+b
Ψa
(i)
、b
Ψa
(i)
、または、W
Ψb
(i)
(d)v
b
(i-1)
+b
Ψb
(i)
について同相写像となるものであり、関数f
Ψ+
は、任意の正値関数(正の値を返す関数)であり、関数f
Ψ
は、任意の関数である。
TIFF
2024160826000014.tif
20
170
TIFF
2024160826000015.tif
22
170
TIFF
2024160826000016.tif
23
170
TIFF
2024160826000017.tif
16
170
上記式(12)~式(15)において、添え字iは、多層ニューラルネットワークにおける層の番号を表し、添え字L
Φ
は、多層ニューラルネットワークの層数を表し、前記出力変数yをn
c
(n
c
は整数)次元の出力変数y
c
とn
d
(n
d
は整数)次元の出力変数y
d
とに分割した場合、重みW
Φc
は、n
c
×n
c
次元行列であり、バイアスb
Φc
は、n
c
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
個人
無人作業システム
2か月前
アズビル株式会社
制御装置
1か月前
コフロック株式会社
流量制御装置
1か月前
和研工業株式会社
多連レバー機構
9日前
スター精密株式会社
工作機械
25日前
株式会社丸和製作所
入力機器
1か月前
株式会社豊田自動織機
荷役車両
1か月前
株式会社フジキン
流量制御装置
1か月前
ローム株式会社
半導体集積回路
4日前
株式会社シンテックホズミ
搬送ロボット
1か月前
株式会社ダイフク
搬送設備
2か月前
株式会社村田製作所
温度補償回路
2か月前
愛知機械テクノシステム株式会社
無人搬送車
18日前
国立大学法人広島大学
モデル誤差抑制補償器
1か月前
株式会社ダイフク
物品搬送設備
2か月前
株式会社ダイフク
物品搬送設備
2か月前
株式会社ダイフク
物品搬送設備
1か月前
株式会社ダイフク
物品搬送設備
2か月前
アズビル株式会社
制御システムおよび制御方法
10日前
アズビル株式会社
制御システムおよび制御方法
19日前
アズビル株式会社
制御システムおよび制御方法
10日前
ルネサスエレクトロニクス株式会社
半導体装置
1か月前
旭精機工業株式会社
監視データ処理装置
2か月前
日本精工株式会社
制御装置および制御方法
16日前
トヨタ自動車株式会社
自律走行装置
1か月前
チームラボ株式会社
走行システム及び走行路
23日前
日本精工株式会社
制御システムおよび制御方法
1か月前
トヨタ自動車株式会社
群制御システム及び群制御方法
18日前
ローム株式会社
半導体装置
1か月前
ミツミ電機株式会社
電源回路及びその起動方法
1か月前
村田機械株式会社
稼働監視システム及び稼働監視方法
19日前
ミツミ電機株式会社
多方向入力装置
2日前
ミツミ電機株式会社
多方向入力装置
2日前
ミツミ電機株式会社
多方向入力装置
16日前
ミツミ電機株式会社
多方向入力装置
16日前
ブラザー工業株式会社
調整方法及び数値制御装置
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ