TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024160636
公報種別
公開特許公報(A)
公開日
2024-11-14
出願番号
2023075854
出願日
2023-05-01
発明の名称
清掃システム、及び清掃プログラム
出願人
株式会社SOKEN
,
株式会社デンソー
代理人
弁理士法人太陽国際特許事務所
主分類
A47L
9/28 20060101AFI20241107BHJP(家具;家庭用品または家庭用設備;コーヒーひき;香辛料ひき;真空掃除機一般)
要約
【課題】汚れの状態に応じて複数の掃除部の操作を変更して掃除を行うことを可能とする。
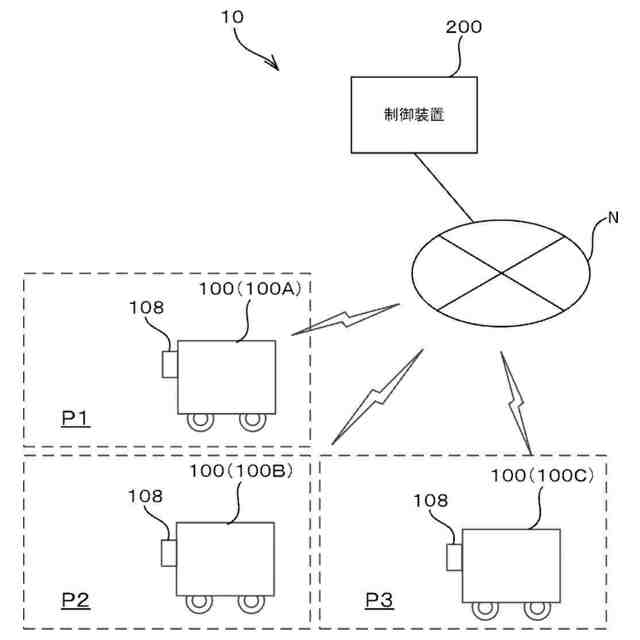
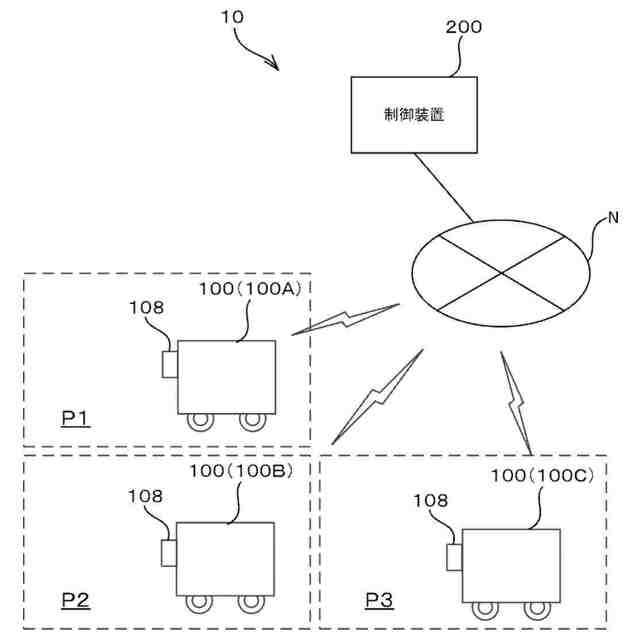
【解決手段】自律走行可能な複数の掃除部100と、発見した汚れTの状態を判定可能な汚れ状態判定部211と、複数の前記掃除部の動作を制御する制御部200と、を備え、前記制御部は、前記汚れ状態判定部が判定した前記汚れの状態によって、複数の前記掃除部の動作を変更して掃除させる。
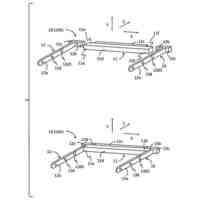
【選択図】図1
特許請求の範囲
【請求項1】
自律走行可能な複数の掃除部(100)と、
発見した汚れ(T)の状態を判定可能な汚れ状態判定部(211)と、
複数の前記掃除部の動作を制御する制御部(200)と、
を備え、
前記制御部は、前記汚れ状態判定部が判定した前記汚れの状態によって、複数の前記掃除部の動作を変更して掃除させる清掃システム(10)。
続きを表示(約 990 文字)
【請求項2】
前記制御部は、前記汚れの状態によって、前記汚れを複数の前記掃除部で掃除させるように動作させる請求項1に記載の清掃システム。
【請求項3】
前記制御部は、複数の前記掃除部毎に、予め定められた範囲の清掃エリア(P)を割り当てて掃除させると共に、前記汚れの状態によって、当該汚れを発見した前記清掃エリアを他の掃除部にも割り当てて掃除させる請求項1に記載の清掃システム。
【請求項4】
前記制御部は、複数の前記掃除部毎に、予め定められたルートに沿って掃除させると共に、前記汚れの状態によって、前記ルートを外れて当該汚れを掃除させる請求項1に記載の清掃システム。
【請求項5】
前記制御部は、前記汚れを複数の前記掃除部で掃除させるように動作させ、
複数の前記掃除部は、異なる掃除の種類を実行する請求項3又は4に記載の清掃システム。
【請求項6】
前記掃除部には、当該掃除部の周囲の人物を認識可能な人物認識部(108)を備え、
前記制御部は、前記汚れの状態が、予め定められた汚れの状態である場合は、前記人物認識部が認識した人物と前記汚れの間に複数の前記掃除部の何れかを移動する請求項1に記載の清掃システム。
【請求項7】
前記人物認識部は、前記人物の移動を検知し、
前記制御部は、前記人物認識部により検知した人物の移動に伴い、当該人物と前記汚れの間に位置するように前記掃除部の何れかを移動させる請求項6に記載の清掃システム。
【請求項8】
前記汚れの状態が予め定められた状態である場合は、前記制御部は、予め定められた者に報知可能である請求項1に記載の清掃システム。
【請求項9】
複数の前記掃除部は、掃除に関する機能の異なる掃除部を含み、
前記制御部は、複数の前記掃除部のうち前記汚れの状態に対応する掃除部を選択して掃除させる請求項1に記載の清掃システム。
【請求項10】
前記制御部は、前記汚れの状態、複数の前記掃除部の動作及び複数の当該掃除部が掃除した後の状態の関係を機械学習した学習済みモデルに基づいて、複数の前記掃除部の動作を変更する請求項1に記載の清掃システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、清掃システム、及び清掃プログラムに関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
近年、自律走行しながら床面の清掃を行う清掃ロボットが活用されている。これらの清掃ロボットは、自宅、オフィス、公共施設(例えば、駅の構内)など、様々な清掃エリアの清掃に利用されている。例えば、国際公開第2022/009391号(特許文献1)には、相対的に広大な場所の清掃に適合する第1自律走行型ロボットと、第1自律走行型ロボットが清掃エリアのレイアウト情報に基づき作成された清掃指示情報に従って清掃エリアを清掃している間、清掃エリア全体を撮影する撮影手段と、撮影手段による撮影により生成された撮像データを解析することで、清掃エリア内において第1自律走行型ロボットが実際に清掃していない範囲を特定する未清掃範囲情報を生成する生成手段と、未清掃範囲情報から特定される、第1自律走行型ロボットが実際に清掃していない範囲の清掃を指示する指示手段と、を有することを特徴とする清掃システムが開示されている。
【先行技術文献】
【特許文献】
【0003】
国際公開第2022/009391号
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載の清掃システム等、従来の清掃システムでは、1台の掃除部が割り当てられた清掃エリアを掃除するが、汚れの状態に応じて複数の掃除部の動作を変更することができず、全ての汚れに対応することが困難であった。
【0005】
本開示は、汚れの状態に応じて複数の掃除部の操作を変更して掃除を行うことが可能な清掃システム及びプログラムを提供することを目的とする。
【課題を解決するための手段】
【0006】
本開示の清掃システム(10)は、自律走行可能な複数の掃除部(100)と、発見した汚れ(T)の状態を判定可能な汚れ状態判定部(211)と、複数の前記掃除部の動作を制御する制御部(200)と、を備え、前記制御部は、前記汚れ状態判定部が判定した前記汚れの状態によって、複数の前記掃除部の動作を変更して掃除させる。
【0007】
本開示のプログラムは、自律走行可能な複数の掃除部を用いて掃除をする制御部を制御するプログラムであって、少なくとも1つのプロセッサ(201)に、発見した汚れの状態を判定させ、判定した前記汚れの状態によって、複数の掃除部の動作を変更して掃除させる処理を実行させる。
【発明の効果】
【0008】
本開示によれば、汚れの状態に応じて複数の掃除部の操作を変更して掃除を行うことができる、という効果を有する。
【図面の簡単な説明】
【0009】
清掃システムの構成図である。
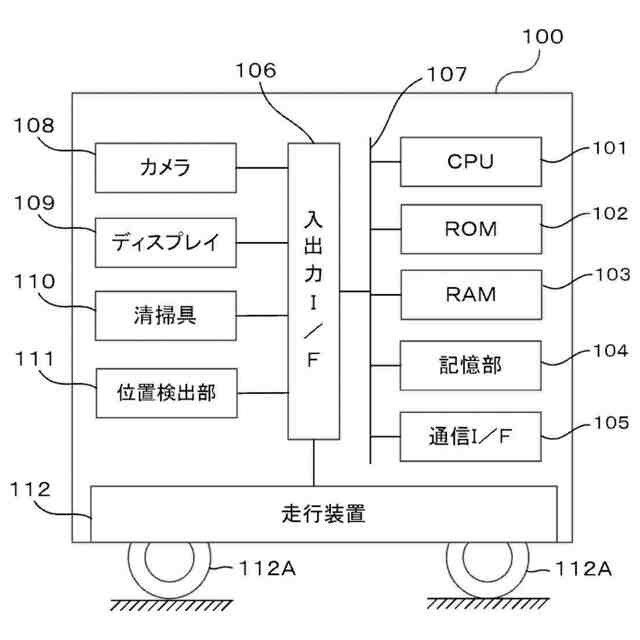
掃除機のハードウエア構成を示す図である。
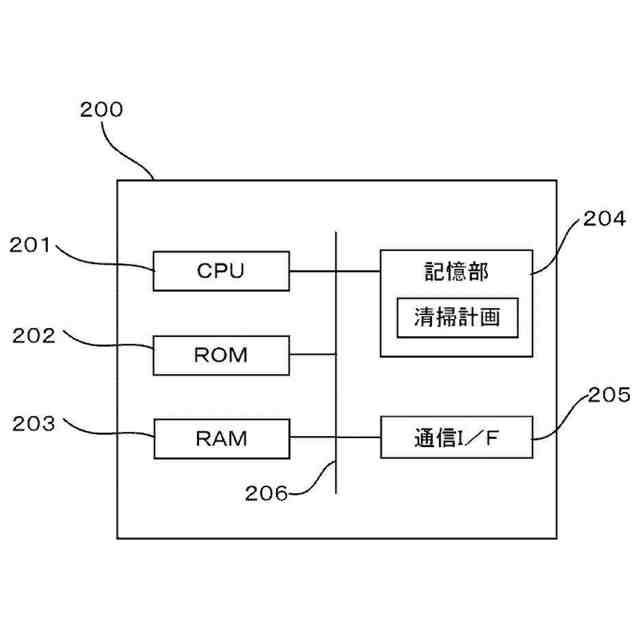
制御装置のハードウエア構成を示す図である。
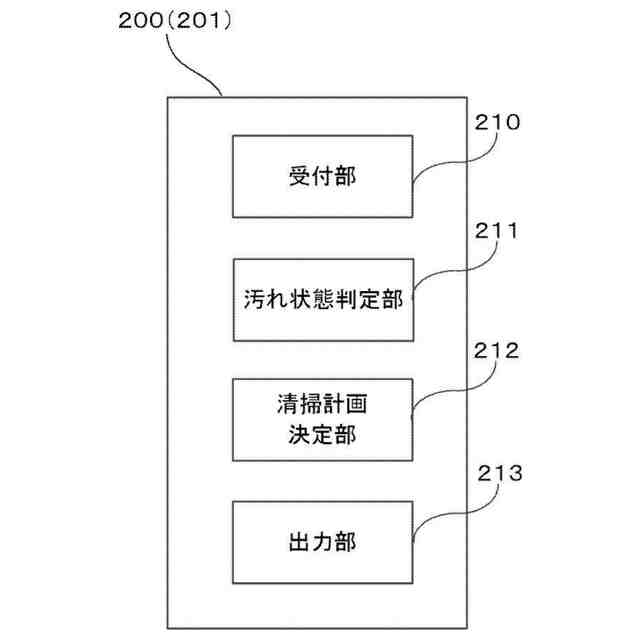
制御装置の機能構成の一例を示す図である。
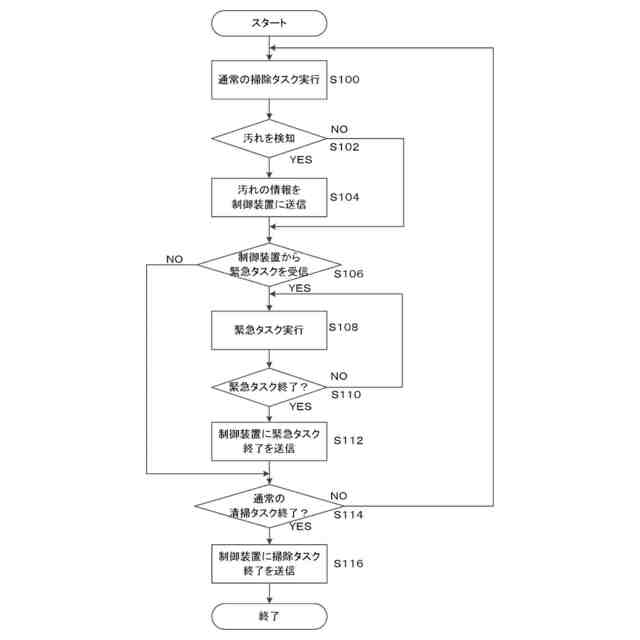
掃除機による清掃システムの清掃処理のフローチャートである。
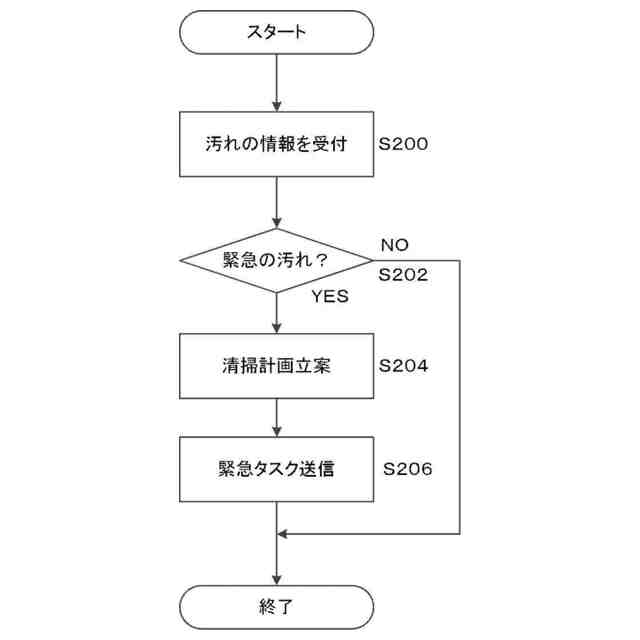
制御装置による清掃システムの清掃処理のフローチャートである。
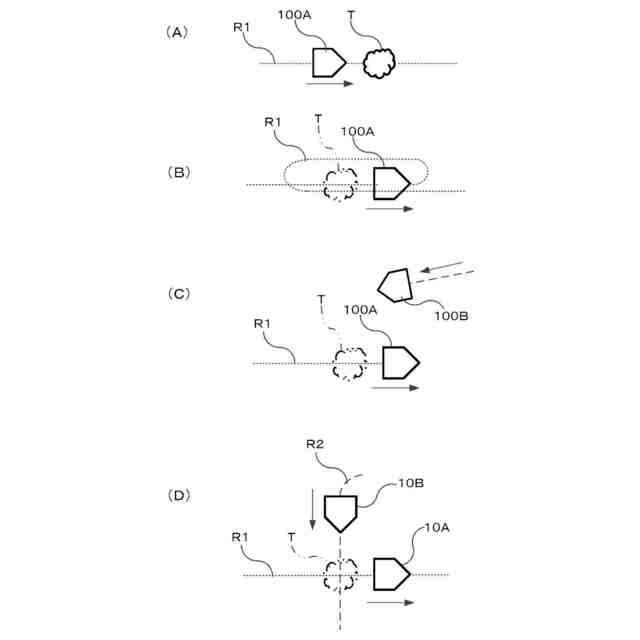
緊急タスクの清掃計画の一例を示す図である。
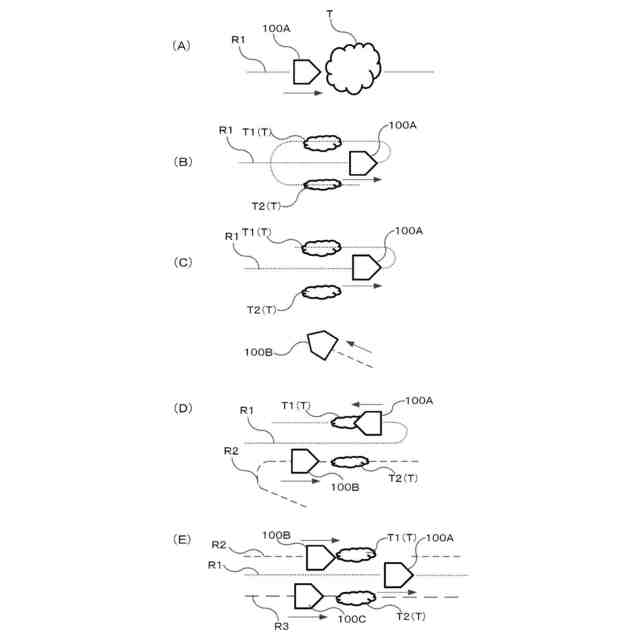
緊急タスクの清掃計画の他の一例を示す図である。
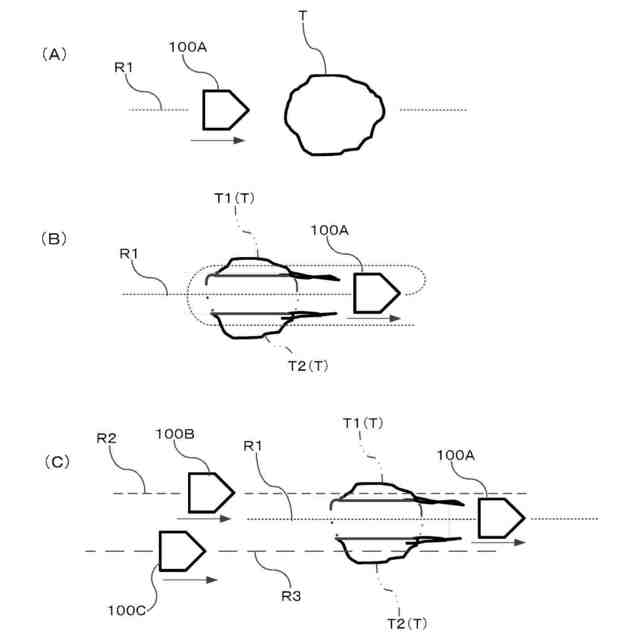
緊急タスクの清掃計画の他の一例を示す図である。
緊急タスクの清掃計画の他の一例を示す図である。
緊急タスクの清掃計画の他の一例を示す図である。
【発明を実施するための形態】
【0010】
以下、図面を参照して、本発明を実施するための形態を詳細に説明する。なお、各図面において同一又は等価な構成要素及び部分には同一の参照符号を付与している。また、図面の寸法比率は、説明の都合上誇張されており、実際の比率とは異なる場合がある。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
枕
8か月前
個人
鍋蓋
2か月前
個人
椅子
5か月前
個人
焼き網
5か月前
個人
モップ
12か月前
個人
泡立て器
11か月前
個人
棚
11か月前
個人
スプーン
8か月前
個人
調理道具
11か月前
個人
乾燥器具
2か月前
個人
エコ掃除機
3か月前
個人
健康学習台
10か月前
個人
寝具補助具
7か月前
個人
皮引き俎板
7か月前
個人
手動挟持具
10か月前
個人
商品トレー
8か月前
個人
絵馬
6か月前
個人
折り畳み台
11か月前
個人
収納型額縁
1か月前
個人
調理用具用蓋
11か月前
個人
転倒防止装置
8か月前
個人
まな板
11か月前
個人
アルミトレー
7か月前
個人
学童机
1か月前
個人
宅配ボックス
7か月前
個人
食器皿セット
8か月前
個人
コップの取手
7か月前
個人
加熱調理器具
10か月前
個人
食品用トング
1か月前
個人
卓上用清掃具
6か月前
個人
折り畳み椅子
1か月前
個人
ひざ掛け固定具
7か月前
個人
寝返り阻止寝具
10か月前
個人
ピーラー
7か月前
個人
枕
9か月前
個人
調理器具
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ