TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024159853
公報種別
公開特許公報(A)
公開日
2024-11-08
出願番号
2024138983,2023015265
出願日
2024-08-20,2014-06-26
発明の名称
水田作業機
出願人
株式会社クボタ
代理人
弁理士法人R&C
主分類
A01B
69/00 20060101AFI20241031BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】動走行に関する情報が適切に表示される構成を有する。
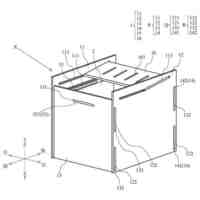
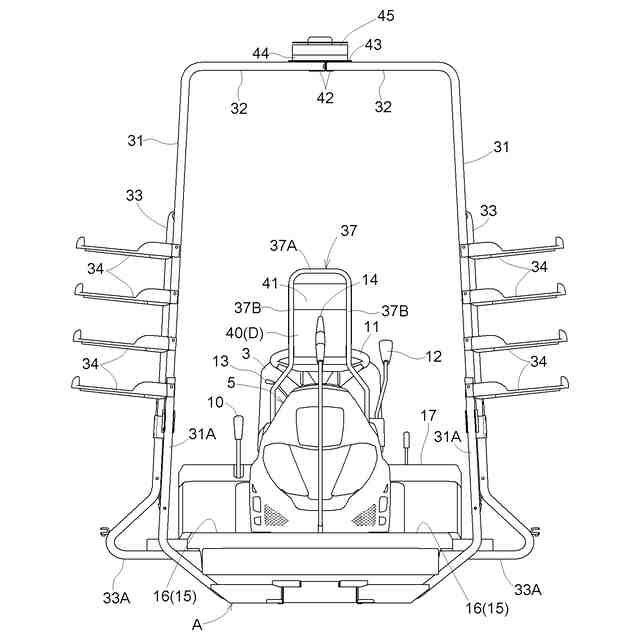
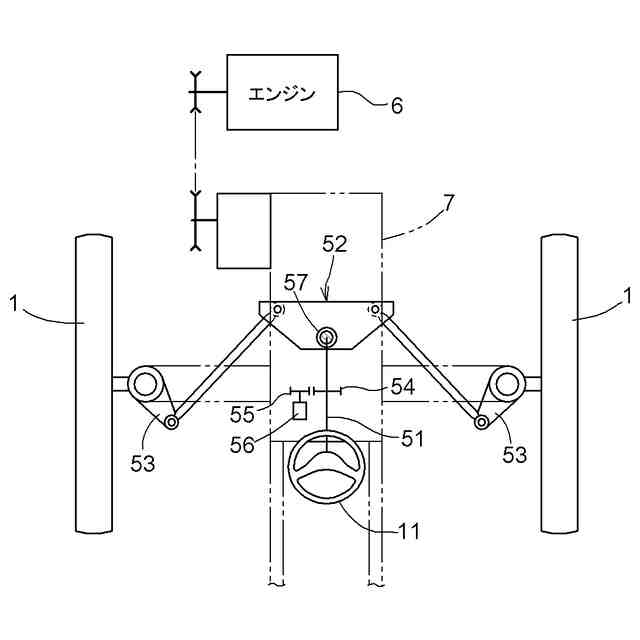
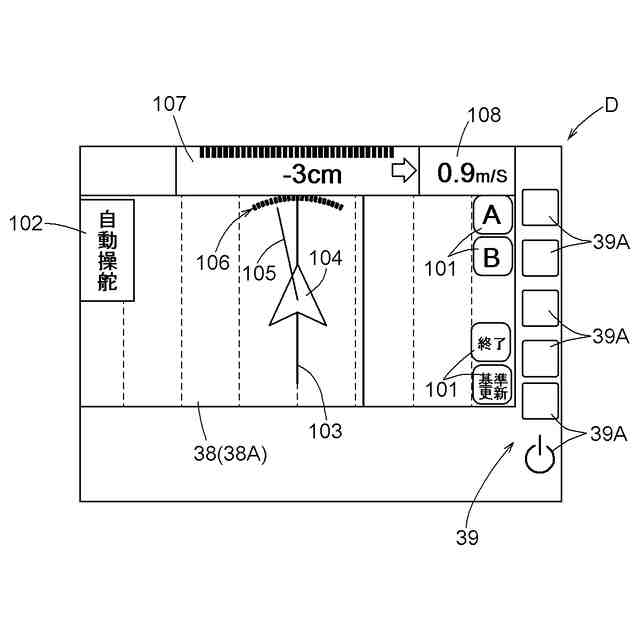
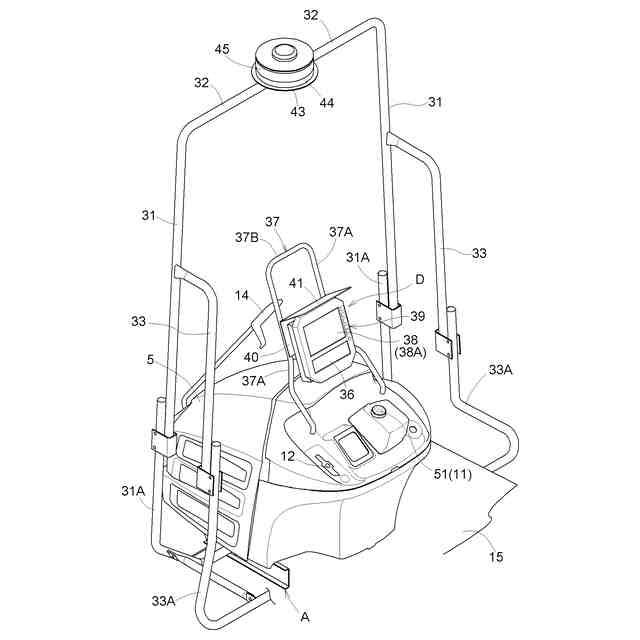
【解決手段】測位衛星からの電波信号を受信し、位置情報を取得する測位システム45と、位置情報に基づいて自動操舵による自動走行が可能な走行機体Aと、走行機体Aに設けられたステアリングホイール11と、自動走行に関する情報が表示される表示装置Dと、表示装置Dを支持する逆U字状の支持フレーム37と、を備え、支持フレーム37の上端がステアリングホイール11よりも前方に位置し、表示装置Dには、自動走行に関する情報として、自動操舵状態であることを示す表示と、走行機体Dの走行方向のズレを示す表示とが表示される。
【選択図】図3
特許請求の範囲
【請求項1】
測位衛星からの電波信号を受信し、位置情報を取得する測位システムと、
前記位置情報に基づいて自動操舵による自動走行が可能な走行機体と、
前記走行機体に設けられたステアリングホイールと、
メータパネルと、
前記自動走行に関する情報が表示される表示装置と、
前記表示装置を支持する逆U字状の支持フレームと、
左右の縦フレームと、を備え、
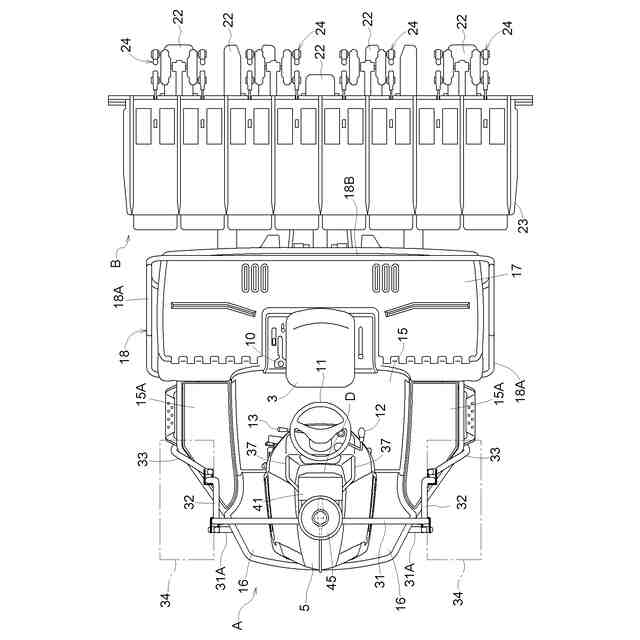
前記表示装置が、前記走行機体の幅方向において、前記左右の縦フレームの間に位置し、前記表示装置の上端部が前記メータパネルの上端部よりも上方に位置し、
前記測位システムの受信ユニットが、正面視で、前記表示装置よりも上方に、且つ、前記表示装置との間に上下方向に間隔を隔てて、前記左右の縦フレームの間に支持され、
前記支持フレームの上端が前記ステアリングホイールよりも前方に位置し、
前記表示装置には、前記自動走行に関する情報として、自動操舵状態であることを示す表示と、走行機体の走行方向のズレを示す表示とが表示される水田作業機。
続きを表示(約 76 文字)
【請求項2】
前記支持フレームの下端部が、前記走行機体の幅方向において、前記左右の縦フレームの間に位置する請求項1に記載の水田作業機。
発明の詳細な説明
【技術分野】
【0001】
本発明は、測位衛星からの電波信号を受信することにより走行車体の位置情報を取得するように構成された水田作業機に関する。
続きを表示(約 2,400 文字)
【背景技術】
【0002】
上記のように構成された水田作業機として特許文献1には、GPS装置により計測される位置情報に基づいて自律走行する技術が示されている。
【0003】
特許文献1では、走行車体に備えたGPSアンテナでGPS衛星(測位衛星)からの電波信号を受信する状態でティーチングを行うことにより基準線を設定し、この基準線に平行となる目標経路を設定する。この設定の後には、GPS衛星(測位衛星)からの電波信号を受信する状態で目標経路上に自律走行させる形態で田植作業を行えるように構成されている。
【0004】
特許文献2には、走行車体の位置を認識するためのGPS受信機を備えており、走行車体の運転キャビンの正面の右側にタッチパネル式の液晶ディスプレイで成るモニタを備えた技術が示されている。
【0005】
この特許文献2では、GPS衛星からの電波をGPS受信機で受信することで走行車体の位置を認識し、モニタに対してナビゲーション情報やボタン類を表示するように構成されている。
【先行技術文献】
【特許文献】
【0006】
特開2008‐92818号公報
特開2002‐186309号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
測位衛星からの電波を受信することにより走行車体の位置情報を取得する水田作業機では作業時に走行車体の位置をモニタで確認することや、作業に必要な情報をモニタで確認する必要がある。
【0008】
走行車体として、運転部の前部にボンネットを配置し、当該ボンネットの両側方に乗降通路となる乗降ステップを形成した構成において、特許文献2に示されるように走行車体のセンターから外れた位置にモニタが配置されたものでは、作業者が乗降ステップで移動する場合にモニタ等が移動の支障になることも考えられ改善の余地がある。
【0009】
本発明の目的は、自動走行に関する情報が適切に表示される構成を有する水田作業機を得る点にある。
【課題を解決するための手段】
【0010】
本発明の作業車は、測位衛星からの電波信号を受信し、位置情報を取得する測位システムと、前記位置情報に基づいて自動操舵による自動走行が可能な走行機体と、前記走行機体に設けられたステアリングホイールと、メータパネルと、前記自動走行に関する情報が表示される表示装置と、前記表示装置を支持する逆U字状の支持フレームと、
左右の縦フレームと、を備え、
前記表示装置が、前記走行機体の幅方向において、前記左右の縦フレームの間に位置し、前記表示装置の上端部が前記メータパネルの上端部よりも上方に位置し、前記測位システムの受信ユニットが、正面視で、前記表示装置よりも上方に、且つ、前記表示装置との間に上下方向に間隔を隔てて、前記左右の縦フレームの間に支持され、前記支持フレームの上端が前記ステアリングホイールよりも前方に位置し、前記表示装置には、前記自動走行に関する情報として、自動操舵状態であることを示す表示と、走行機体の走行方向のズレを示す表示とが表示される。
また、本発明の水田作業機は、測位衛星からの電波信号を受信し、位置情報を取得する測位システムと、前記位置情報に基づいて自動操舵による自動走行が可能な走行機体と、前記走行機体に設けられたステアリングホイールと、前記自動走行に関する情報が表示される表示装置と、前記表示装置を支持する逆U字状の支持フレームと、を備え、前記支持フレームの上端が前記ステアリングホイールよりも前方に位置し、前記表示装置には、前記自動走行に関する情報として、自動操舵状態であることを示す表示と、走行機体の走行方向のズレを示す表示とが表示される。
本発明の水田作業機は、測位衛星からの電波信号を受信し、位置情報を取得する測位システムと、前記位置情報に基づいて自動操舵による自動走行が可能な走行機体と、前記走行機体に設けられた運転座席と、前記運転座席の前方に設けられ、前記自動走行に関する情報が表示される表示装置とを備え、前記表示装置には、前記自動走行に関する情報として、自動操舵状態であることを示す表示と、走行機体の走行方向のズレを示す表示とが表示される。
上記構成において、前記運転座席の前方に設けられたステアリングポストの下方にメータパネルが設けられ、前記メータパネルとは別に前記表示装置が設けられていると好適である。
また、上記構成において、前記自動走行に関する情報は、前記表示装置と前記メータパネルのうちの前記表示装置のみに表示されると好適である。
また、前記測位システムを支持する測位システム支持フレームを備え、前記測位システム支持フレームが左右の縦フレーム部と左右の縦フレーム部の上端同士を連結する連結フレーム部とを有し、走行機体の前後方向視で、前記表示装置を支持する支持フレーム及び前記表示装置が、左右の縦フレーム部及び連結フレーム部で囲われる空間の内側に位置すると好適である。
また、本発明の水田作業機は、走行車体が、運転部の前部にボンネットを配置し、当該ボンネットの両側方に乗降通路となる乗降ステップが形成され、前記ボンネットの後部で運転座席より前方にステアリングホイールが配置されると共に、測位衛星からの電波信号を受信し、走行車体の位置情報を取得してコンソールのモニタ部に表示する測位システムを備え、前後方向視において前記ボンネットの幅内において、前記モニタ部が前記ステアリングホイールより高い位置に配置されるように前記コンソールが備えられた点にある。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
除草装置
1か月前
個人
柄杓じょうろ
25日前
個人
ペット用リード
14日前
個人
猫砂ふるいパック
1か月前
個人
植物栽培装置
1か月前
個人
動物用トイレ
5日前
井関農機株式会社
作業機
26日前
個人
水耕栽培装置
1か月前
個人
引張犬散歩補助ベルト
1か月前
株式会社シマノ
釣竿
5日前
株式会社シマノ
釣竿
1か月前
個人
植物の栽培管理システム
25日前
株式会社共和
果実回し具
25日前
個人
養殖システム
11日前
株式会社ウエ・ルコ
ダニ捕獲器
12日前
個人
タケノコの多収栽培法
26日前
個人
動物用罠及び罠用装置
1か月前
井関農機株式会社
作業車両
12日前
東都興業株式会社
支持部材
5日前
株式会社大貴
動物用トイレ
12日前
株式会社シマノ
釣竿
1か月前
日機装株式会社
浄化ユニット
1か月前
松山株式会社
農作業機
1か月前
松山株式会社
農作業機
27日前
株式会社シマノ
両軸受リール
1か月前
個人
水活用による果樹の結実安定化法
1か月前
伊東電機株式会社
植物栽培装置
25日前
個人
直蒔き水稲栽培法とその補助機器
1か月前
個人
魚介類養殖システム
11日前
株式会社山田鉄工
海苔網処理船
1か月前
花王株式会社
殺菌剤組成物
1か月前
株式会社猫壱
ペット用食器
1か月前
株式会社山田鉄工
海苔網処理方法
1か月前
マコー株式会社
水生生物育成装置
25日前
東都興業株式会社
シート巻取り装置
12日前
いであ株式会社
害鳥獣防除システム
11日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ