TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024159156
公報種別
公開特許公報(A)
公開日
2024-11-08
出願番号
2023074972
出願日
2023-04-28
発明の名称
路側帯自走ロボット
出願人
株式会社移動ロボット研究所
,
株式会社ネクスコ東日本エンジニアリング
代理人
個人
,
個人
,
個人
主分類
E01H
15/00 20060101AFI20241031BHJP(道路,鉄道または橋りょうの建設)
要約
【課題】 緊急時及び道路の維持修繕、点検作業時等に車両の走行規制を実施するための安全性を向上させる技術を開発すること。
【解決手段】管理用車両に搭載可能な大きさを有する、車道の路側帯を白線に沿って、自動走行する路側帯自走ロボット。
【選択図】図9
特許請求の範囲
【請求項1】
管理用車両に搭載可能な大きさを有する、車道の路側帯を白線に沿って、自動走行する路側帯自走ロボット。
続きを表示(約 1,300 文字)
【請求項2】
車体の側方に白線を検知する白線認識装置を備えていることを特徴とする請求項1記載の路側帯自走ロボット。
【請求項3】
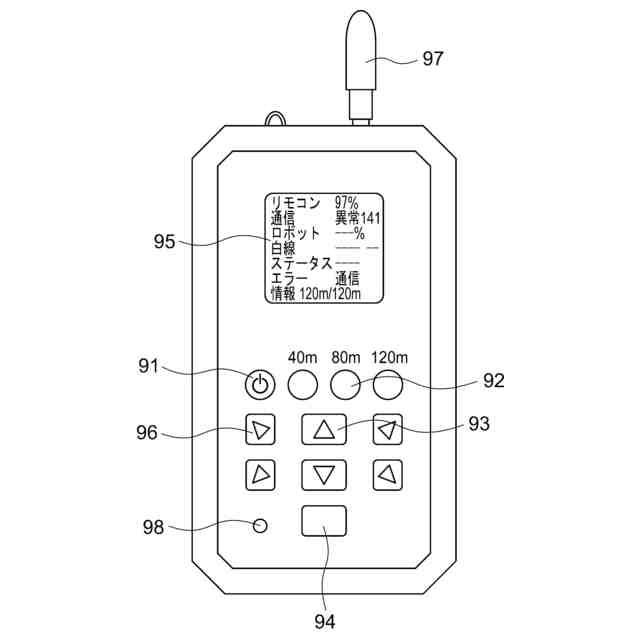
白線用の照明、制御装置、コントローラを備えており、
制御装置は、白線認識制御、発進位置から路側帯を所定距離走行して停止位置で停止する走行制御、コントローラからの操作制御を備えていることを特徴とする請求項2記載の路側帯自走ロボット。
【請求項4】
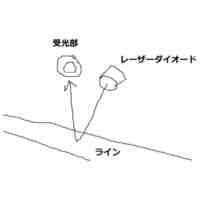
白線認識装置は、路側帯自走ロボットの進行方向の前方側の白線を撮像する前方カメラと進行方向の後方側の白線を撮像する後方カメラと白線照明を備えていることを特徴とする請求項3記載の路側帯自走ロボット。
【請求項5】
走行制御には、前方カメラと後方カメラの両方のカメラに白線の画像がある場合は、両方の白線情報に基づいて走行が制御され、白線情報が片方のカメラの情報しか得られない場合は得られた白線情報に基づいて走行が制御され、両方のカメラから白線情報が得られない場合は走行を停止する制御が含まれることを特徴とする請求項4記載の路側帯自走ロボット。
【請求項6】
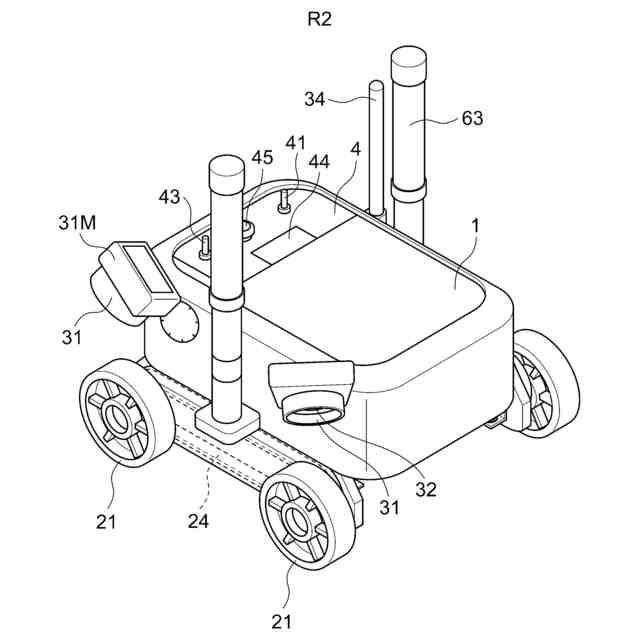
上部側の箱状の上部フレームと車輪が取り付けられた下部側の駆動フレームを備えており、
下部側の駆動フレームには、駆動系機構が設けられており、
上部フレームと駆動フレームは、路面凸凹吸収機構を介して、接続されていることを特徴とする請求項3記載の路側帯自走ロボット。
【請求項7】
路面凸凹吸収機構は、下部側の駆動フレームが前後に揺動できるスイング装置又は/及び上下動吸収装置を備えていることを特徴とする請求項6記載の路側帯自走ロボット。
【請求項8】
上部側の箱状の上部フレームと車輪が取り付けられた下部側の駆動フレームを備えており、
上部フレームには、操作盤、白線検知装置が設けられており、
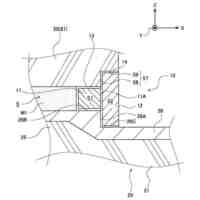
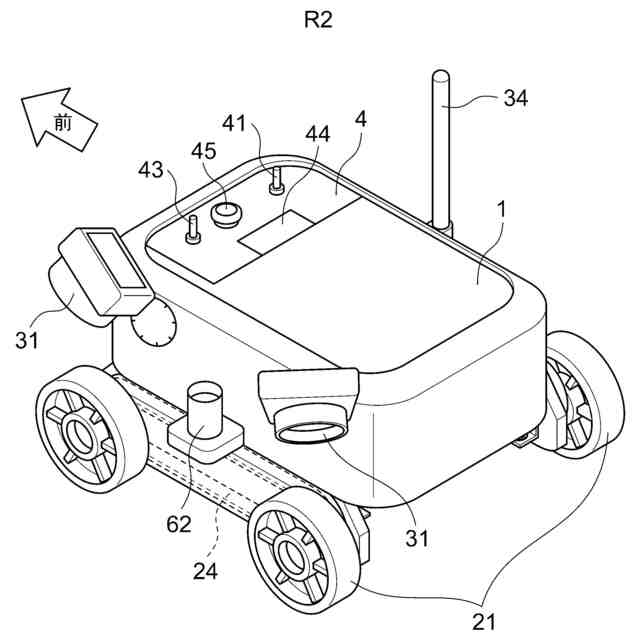
上部フレームの一方の側面フレームの外側に、路側帯自走ロボットの進行方向の前方側の白線を撮像する前方カメラと進行方向の後方側の白線を撮像する後方カメラと白線照明が取り付けられており、
下部側の駆動フレームには、バッテリが搭載されていることを特徴とする請求項3記載の路側帯自走ロボット。
【請求項9】
上部フレームは、箱状フレームであり、
駆動フレームは、左右の走行フレームと左右の走行フレームを連結するクロスフレームを備えており、
走行フレームと上部フレームの底フレームの間にはサスペンションが設けられており、
走行フレームには、前後に車輪が取り付けられており、一方の車輪側にモータが設けられ、他方の車輪にブレーキが設けられ、前後の車輪間にベルトが設けられており、
車輪にはゴムが被覆されており、
クロスフレームには、バッテリが搭載されていることを特徴とする請求項3記載の路側帯自走ロボット。
【請求項10】
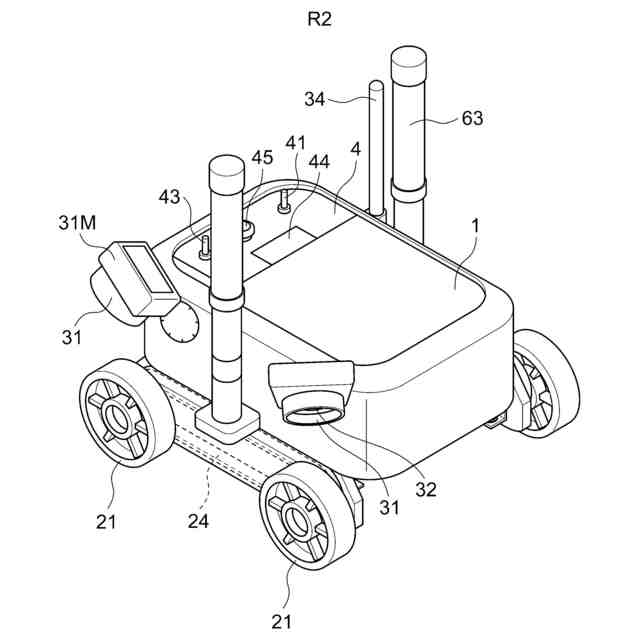
発光灯を備えており、走行中及び停止後発光灯を点灯させていることを特徴とする請求項1記載の路側帯自走ロボット。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、道路保全技術に関する。特に、緊急時の安全確保に関する技術である。
続きを表示(約 4,200 文字)
【背景技術】
【0002】
道路では通常走行の障害となる事態が発生すると、道路管理者が、障害が発生した現場に急行して、障害の解消作業に当たっている。
例えば、高速道路では、落下物の数が多く、後続車の事故や渋滞の原因になる可能性があり、至急回収する必要がある。
この回収には、現場に緊急車両を急行させて、回収作業のために走行車両の走行を規制し、回収し、走行規制を解除する作業を、作業員(パトロール隊員)が行っている。交通規制をする作業員と回収する作業員の最低2名の作業員を必要とする。高速走行している後続車両に報知して、回避走行あるいは停車させて、安全に回収作業を行う必要がある。
また、道路の維持作業、点検作業等においても走行車線上で作業を行うため走行規制を行うことがある。
走行規制を行う作業は、まず、障害物を現認するために障害物付近の路側帯に緊急車両を停車させて、その地点から作業員が上手方向に所定距離徒歩で移動して、走行規制の先端部で旗や警告灯、発炎筒などを用いて、後続車に知らせる必要がある。まず、この作業員の移動中に後続車と接触するなど危険を伴う作業である。
【0003】
交通規制のための装置として、発炎筒、警告ランプ、誘導表示具などが提案されて、使用されている。
例えば、特許文献1には、高速道路、一般道路、その他工事現場で使用する保安用品であって、内部密封状の破裂容易な膨縮袋体から構成し、使用時には膨縮袋体の内部に膨張させる空気と重りとして機能する水を注入して、空気圧で所定形状に保持すると共に注入した水で配置箇所に固定状に設置する安全標識具が開示されている。
【0004】
特許文献2には、トラック型車輌の荷台後部下側にバンパー本体とこれに連結したロッドを後方に引出し可能に保持する保持体を有する可動バンパー装置を設け、荷台両側には長手方向で分割されたあおりを設けるとともにそれらあおり近傍に床面より凹入した作業用ボックスを設け、荷台後側部位には、床を貫通して斜めに伸び、方向変位可能かつ上下移動可能な投下パイプを有する発炎筒投下装置を設けた、高速道路の規制現場で、後尾警戒と規制用資機材の配置作業を安全、迅速、確実に行なうことができる道路規制用車輌が開示されている。
しかし、走行規制する最初に到達するために安全性を確保する手段の開発は行われていない。
【先行技術文献】
【特許文献】
【0005】
実用新案登録第3114211号公報
特開2003-2109号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
本発明は、緊急時及び道路の維持修繕、点検作業時等に車両の走行規制を実施するための安全性を向上させる技術を開発することを目的とする。
【課題を解決するための手段】
【0007】
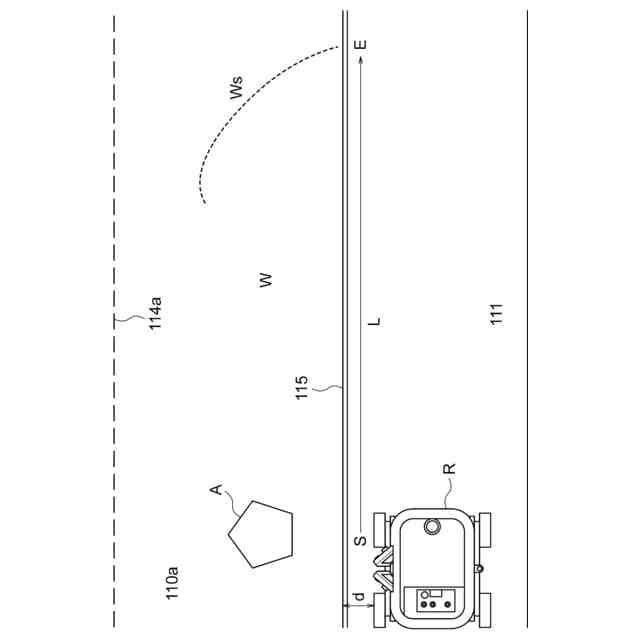
本発明は、車道の路側帯を白線に沿って、自動走行する軽量小型の路側帯自走ロボットである。本発明では、自動車の通常の走行に供される車線の外側に設けられている緊急車両や保守点検車両が走行する路肩と中央分離帯側に設けられているスペース(側帯)を含めて路側帯と言う。
【0008】
本発明は、次の構成を要旨とするものである。
1.管理用車両に搭載可能な大きさを有する、車道の路側帯を白線に沿って、自動走行する路側帯自走ロボット。
2.車体の側方に白線を検知する白線認識装置を備えていることを特徴とする1.記載の路側帯自走ロボット。
3.白線用の照明、制御装置、コントローラを備えており、
制御装置は、白線認識制御、発進位置から路側帯を所定距離走行して停止位置で停止する走行制御、コントローラからの操作制御を備えていることを特徴とする2.記載の路側帯自走ロボット。
4.白線認識装置は、路側帯自走ロボットの進行方向の前方側の白線を撮像する前方カメラと進行方向の後方側の白線を撮像する後方カメラと白線照明を備えていることを特徴とする3.記載の路側帯自走ロボット。
5.走行制御には、前方カメラと後方カメラの両方のカメラに白線の画像がある場合は、両方の白線情報に基づいて走行が制御され、白線情報が片方のカメラの情報しか得られない場合は得られた白線情報に基づいて走行が制御され、両方のカメラから白線情報が得られない場合は走行を停止する制御が含まれることを特徴とする4.記載の路側帯自走ロボット。
6.上部側の箱状の上部フレームと車輪が取り付けられた下部側の駆動フレームを備えており、
下部側の駆動フレームには、駆動系機構が設けられており、
上部フレームと駆動フレームは、路面凸凹吸収機構を介して、接続されていることを特徴とする3.記載の路側帯自走ロボット。
7.路面凸凹吸収機構は、下部側の駆動フレームが前後に揺動できるスイング装置又は/及び上下動吸収装置を備えていることを特徴とする6.記載の路側帯自走ロボット。
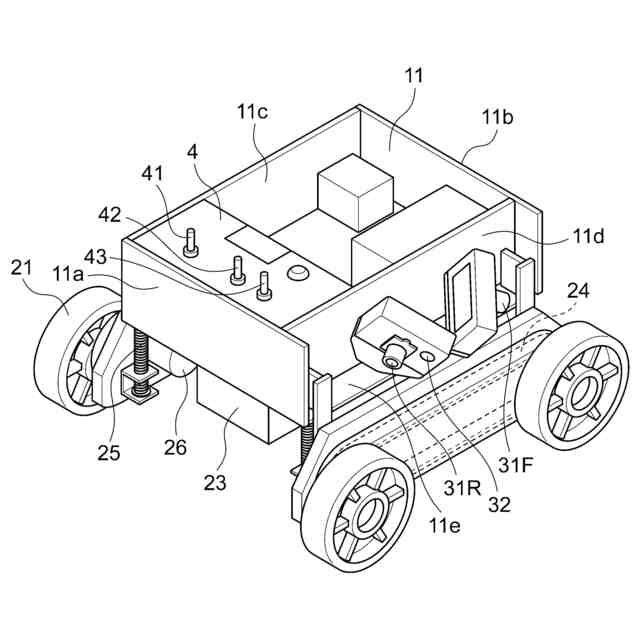
8.上部側の箱状の上部フレームと車輪が取り付けられた下部側の駆動フレームを備えており、
上部フレームには、操作盤、白線検知装置が設けられており、
上部フレームの一方の側面フレームの外側に、路側帯自走ロボットの進行方向の前方側の白線を撮像する前方カメラと進行方向の後方側の白線を撮像する後方カメラと白線照明が取り付けられており、
下部側の駆動フレームには、バッテリが搭載されていることを特徴とする3.記載の路側帯自走ロボット。
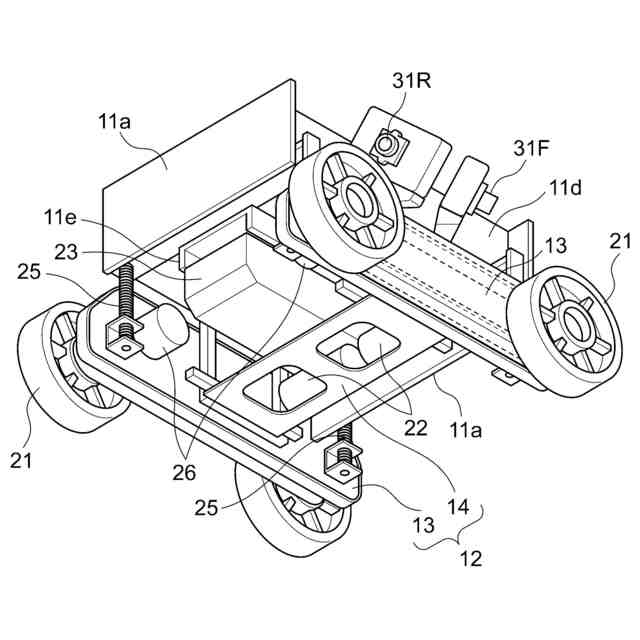
9.上部フレームは、箱状フレームであり、
駆動フレームは、左右の走行フレームと左右の走行フレームを連結するクロスフレームを備えており、
走行フレームと上部フレームの底フレームの間にはサスペンションが設けられており、
走行フレームには、前後に車輪が取り付けられており、一方の車輪側にモータが設けられ、他方の車輪にブレーキが設けられ、前後の車輪間にベルトが設けられており、
車輪にはゴムが被覆されており、
クロスフレームには、バッテリが搭載されていることを特徴とする3.記載の路側帯自走ロボット。
10.発光灯を備えており、走行中及び停止後発光灯を点灯させていることを特徴とする1.記載の路側帯自走ロボット。
11. 車道は、高速道路又は自動車専用道路であることを特徴とする1.記載の路側帯自走ロボット。
12.1.~11.のいずれかに記載の路側帯自走ロボットが、白線を検出し、白線に対して一定の間隔を保持しながら、路側帯側を所定距離走行して、停止して、後続車に注意を喚起する方法。
【発明の効果】
【0009】
1.本発明の車道の路側帯を白線に沿って、自動走行する軽量小型の路側帯自走ロボットは、車両の走行規制を実施するにあたり、作業員に先行して後続車両に注意を喚起できるので、作業員と後続車両のために安全性を向上させることができる。本発明の路側帯自走ロボットは、道路の管理車両に搭載できる大きさほどの小型であり、一人で持ち運びでき、緊急時に携帯できる小型軽量を実現できた。特に、車両が高速で走行している高速道路や自動車専用道路上での作業の安全性の確保に貢献できる。
2.本発明の路側帯自走ロボットは、車体側方に設けられた白線認識装置によって、検知された白線の外側(側道部分)を所定距離走行して停止するので、後続車両に対して安全性を保って走行できる。また、白線上の凹凸や滑り性に影響されずに走行することができる。
3.白線認識装置は、前方向の白線と後ろ方向の白線を認識する装置を備えているので、基本は両方向の白線を検知して走行するが、一方の白線検知でも走行できるので、走行の確実性が高い。白線用の照明を備えているので、夜間やトンネル内でも使用することができる。また、白線を検知できないときは停止して待機状態となるので、後続車両の走行の障害にならない。
4.コントローラ制御もできるので、路側帯自走ロボットが車道側に出たときなどには、作業員がコントローラから停止指示など、コントローラ優先の操作ができる。
5.小型軽量かつ部品に分離しやすい構成であるので、後続車両と衝突しても、重大事故にならないような構造を備えている。上部フレームと下部フレームで構成して、下部フレームにバッテリと駆動系の構造を配置したので、下部側が重く、上部側が軽量であるので、
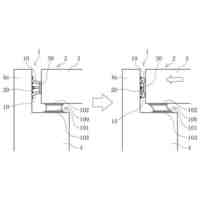
6.上部フレームと下部フレームの間には、路面の凸凹を吸収する機構が設けられているので、路面の凹凸を乗り越えて走行でき、路面の凹凸による上下動が上部フレームに伝わらないように凹凸吸収機構を形成しているので、上部フレームの姿勢が安定するので、白線認識装置のカメラが白線を見失うリスクが小さくなり、白線に沿った安定した走行を確保できる。また、ゴム被覆車輪によってスリップを防止できる。
7.発光灯を搭載することにより、後続の走行車両への注意喚起をすることができる。
【図面の簡単な説明】
【0010】
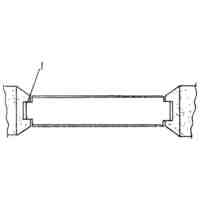
路側帯自走ロボットの概略を示す図。
コントローラの例を示す図。
路側帯自走ロボットの走行概略図。
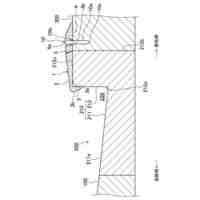
路側帯自走ロボット構造図1。
路側帯自走ロボット構造図2。
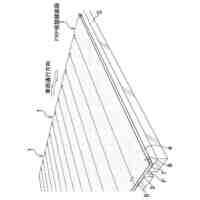
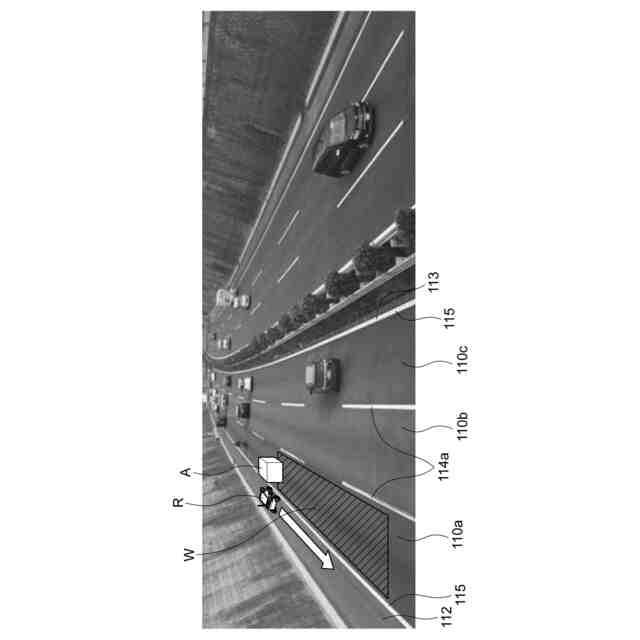
道路の状況説明図。
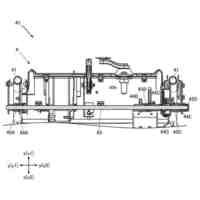
路側帯を走行する路側帯自走ロボット例2を示す図。
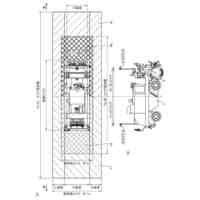
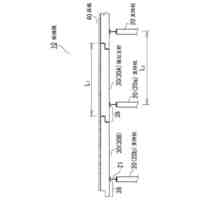
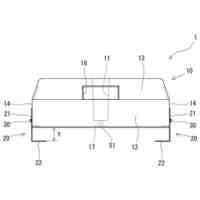
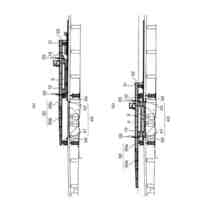
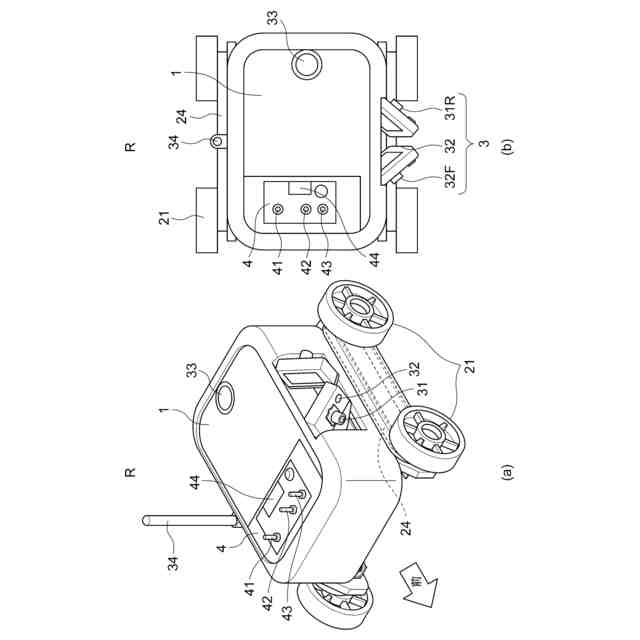
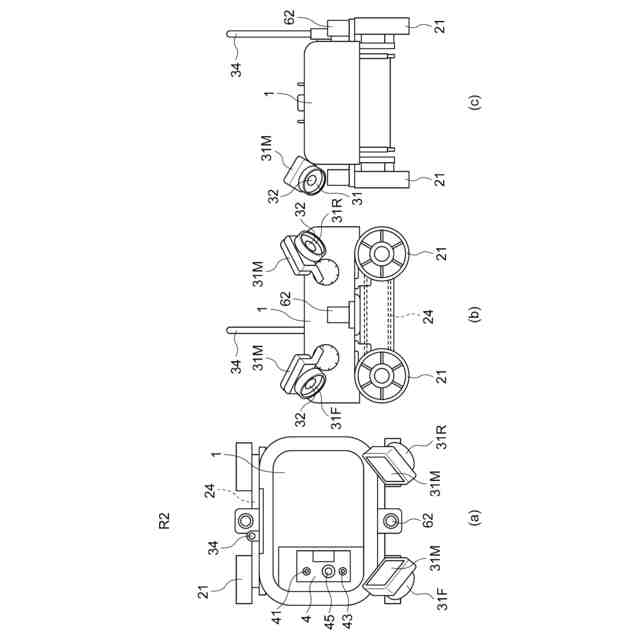
路側帯を走行する路側帯自走ロボット例2の3面図を示す。
路側帯自走ロボット例2の側部に発光灯を搭載した路側帯自走ロボットの例を示す。
路側帯自走ロボット例1の上部に発行灯を機体上面に搭載した路側帯自走ロボットの例を示す。
制御システム構成図を示す。
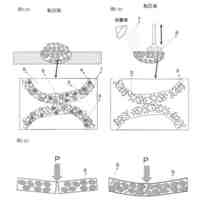
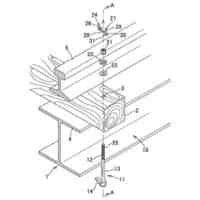
凹凸吸収機構の例を示す図。
凹凸吸収機構の例を示す図(構造図)。
【発明を実施するための形態】
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
個人
橋梁の伸縮装置
3日前
個人
紫外線ライントレースカー
1か月前
個人
紫外線ライントレースカー
1か月前
アトラス埋込型信号機株式会社
路面信号機
24日前
株式会社ビー・ビー・エム
弾性緩衝体
2日前
範多機械株式会社
路面切削機及びその制御方法
3日前
太陽工業株式会社
防草構造及び防草用部材
16日前
株式会社 フィルターサービス
塗膜剥離施工方法
24日前
範多機械株式会社
道路舗装機械及びその制御方法
2日前
株式会社横河ブリッジ
床版架設機移動方法
25日前
戸田建設株式会社
ケレン用機械
24日前
早川ゴム株式会社
縁石保護材
18日前
ヒロセ株式会社
仮桟橋の構築方法
10日前
ニチレキ株式会社
舗装工事用刷毛
1か月前
ニッタ株式会社
伸縮装置
1か月前
日立建機株式会社
タイヤローラ
1か月前
ピーエス・コンストラクション株式会社
橋梁及びその構築方法
1か月前
シンレキ工業株式会社
軟質植物油脂を含む鹸化反応型常温混合物
16日前
株式会社工進
除雪機
1か月前
株式会社工進
除雪機
1か月前
株式会社工進
除雪機
1か月前
宮地エンジニアリング株式会社
FRP仮設舗装版
3日前
株式会社シーマコンサルタント
施工管理方法
17日前
株式会社赤羽コンクリート
支柱基礎用コンクリートブロック
16日前
鉄道機器株式会社
まくらぎ
16日前
鉄道機器株式会社
まくらぎ
16日前
鉄道機器株式会社
まくらぎ
16日前
株式会社大林組
防水構造及び、防水工法
2日前
コンドーテック株式会社
枕木固定構造及び枕木固定方法
1か月前
株式会社栗本鐵工所
樹脂製検査路の状態監視方法および樹脂製検査路
24日前
大成ロテック株式会社
舗装体および舗装体の補修方法
2日前
株式会社横河ブリッジ
扛上引継ぎ装置、移動装置、扛上引継ぎ方法、移動方法
3日前
三井住友建設株式会社
伸縮装置、その取付構造及びその構築方法
4日前
株式会社ケー・ワイ・ビー
着色された表面層を有するコンクリート路面を敷設する方法
1か月前
清水建設株式会社
コンクリート床版の切断方法
1か月前
清水建設株式会社
コンクリート床版の切断方法
10日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ