TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024159125
公報種別
公開特許公報(A)
公開日
2024-11-08
出願番号
2023074913
出願日
2023-04-28
発明の名称
作業機械に対して所定の作業中の人への身体的な負担を評価するためのシステム及び方法
出願人
株式会社小松製作所
,
国立研究開発法人産業技術総合研究所
代理人
弁理士法人新樹グローバル・アイピー
主分類
A61B
5/11 20060101AFI20241031BHJP(医学または獣医学;衛生学)
要約
【課題】作業機械に対して所定の作業中の人への身体的な負担を容易、且つ、精度よく評価する。
【解決手段】システムは、データベースとプロセッサとを備える。データベースは、基準モーションデータを含む。基準モーションデータは、第1作業機械に対して所定の作業中の第1の人の動作と、動作中の第1の人への反力とを示す。プロセッサは、第1作業機械と異なる第2作業機械の拘束条件を示す第2機械データを取得する。プロセッサは、第1の人と異なる第2の人の拘束条件を示す第2人データを取得する。プロセッサは、第2機械データと第2人データとに基づいて、基準モーションデータを参照して、第2作業機械に対して所定の作業中の第2の人の動作と第2の人への反力とを算出し、第2の人への身体的な負担を示す身体指標を算出する。プロセッサは、身体指標に基づいて第2の人への身体的な負担を定量的に評価する。
【選択図】図13
特許請求の範囲
【請求項1】
作業機械に対して所定の作業中の人への身体的な負担を評価するためのシステムであって、前記作業機械と前記人とのそれぞれは、前記動作を規定する拘束条件を有し、
第1作業機械に対して所定の作業中の第1の人の動作と、前記動作中の前記第1の人への反力とを示す基準モーションデータを含み、前記基準モーションデータには、前記第1作業機械の前記拘束条件を示す第1機械データと、前記第1の人の前記拘束条件を示す第1人データとが割り当てられているデータベースと、
プロセッサと、
を備え、
前記プロセッサは、
前記第1作業機械と異なる第2作業機械の前記拘束条件を示す第2機械データを取得し、
前記第1の人と異なる第2の人の前記拘束条件を示す第2人データを取得し、
前記第2機械データと前記第2人データとに基づいて、前記基準モーションデータを参照して、前記第2作業機械に対して前記所定の作業中の前記第2の人の動作と前記第2の人への反力とを算出し、
前記第2の人の動作と前記第2の人への反力とに基づいて前記第2の人への身体的な負担を示す身体指標を算出し、
前記身体指標に基づいて前記第2の人への身体的な負担を定量的に評価する、
システム。
続きを表示(約 840 文字)
【請求項2】
前記身体指標は、前記第2の人の関節の位置を含む、
請求項1に記載のシステム。
【請求項3】
前記身体指標は、前記第2の人の関節の角度を含む、
請求項1に記載のシステム。
【請求項4】
前記身体指標は、前記第2の人の関節トルクを含む、
請求項1に記載のシステム。
【請求項5】
前記プロセッサは、前記第2作業機械に対して前記所定の作業中の前記第2の人の動作を示す推定モーションデータを生成する、
請求項1に記載のシステム。
【請求項6】
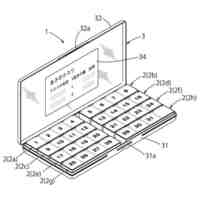
ディスプレイをさらに備え、
前記プロセッサは、前記推定モーションデータに従って動作するデジタルヒューマンを前記ディスプレイに表示する、
請求項5に記載のシステム。
【請求項7】
前記プロセッサは、前記第2の人への身体的な負担に応じて前記デジタルヒューマンを部分的に異なる色で表示する、
請求項6に記載のシステム。
【請求項8】
前記所定の作業は、前記作業機械への乗り込みであり、
前記作業機械は、手すり、及び/又は、ステップを含み、
前記拘束条件は、前記手すり、及び/又は、前記ステップの位置を示す、
請求項1に記載のシステム。
【請求項9】
前記所定の作業は、前記作業機械の整備であり、
前記作業機械は、所定の整備箇所を含み、
前記拘束条件は、前記所定の整備箇所の位置を示す、
請求項1に記載のシステム。
【請求項10】
前記所定の作業は、前記作業機械の運転操作であり、
前記拘束条件は、前記作業機械のオペレータ用のシートの位置、及び/又は、前記オペレータによって操作される操作部材の位置を示す、
請求項1に記載のシステム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、作業機械に対して所定の作業中の人への身体的な負担を評価するためのシステム及び方法に関する。
続きを表示(約 2,800 文字)
【背景技術】
【0002】
作業機械では、オペレータが、昇降、或いは整備などの様々な作業を行う。作業機械は、一般的な乗用車と比べて、大型であるため、或いは複雑な構造を有するため、これらの作業を行うことは、オペレータにとって容易ではない。例えば、作業機械では、キャブが高い位置に配置されている。そのため、例えば特許文献1に示されるように、作業機械には、オペレータが昇降するための手すりとステップとが設けられている。オペレータは、手すりを握り、ステップに足をかけることで、キャブまで、よじ登る。
【0003】
或いは、作業機械において、給油、フィルダー交換などの整備を行う場合、オペレータは、作業機械の側面カバー、或いは天面カバーを開くことで、作業機械の内部の整備箇所にアクセスする。この場合も、オペレータは、ステップに足をかけるなどして、整備箇所まで、よじ登る。或いは、整備箇所が地面からアクセス可能であっても、手が届きにくい位置にあることで、作業が容易ではない。
【先行技術文献】
【特許文献】
【0004】
特開2000-204596号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
作業機械は、上記のような作業中のオペレータの疲労を低減させるように、設計されることが望ましい。或いは、作業現場におけるオペレータの疲労を把握することは、現場の管理者によるオペレータの業務管理において望ましい。そのためには、作業中のオペレータへの身体的な負担を把握することが望まれる。しかし、作業機械には様々な形状、或いは大きさのものがある。また、オペレータの体格も様々である。そのため、同じ作業であっても、オペレータへの身体的な負担を精度よく評価することは容易ではない。本開示の目的は、作業機械に対して所定の作業中の人への身体的な負担を容易、且つ、精度よく評価することにある。
【課題を解決するための手段】
【0006】
本開示の一態様に係るシステムは、作業機械に対して所定の作業中の人への身体的な負担を評価するためのシステムである。作業機械と人とのそれぞれは、動作を規定する拘束条件を有する。システムは、データベースとプロセッサとを備える。データベースは、基準モーションデータを含む。基準モーションデータは、第1作業機械に対して所定の作業中の第1の人の動作と、動作中の第1の人への反力とを示す。基準モーションデータには、第1機械データと第1人データとが割り当てられている。第1機械データは、第1作業機械の拘束条件を示す。第1人データは、第1の人の拘束条件を示す。プロセッサは、第1作業機械と異なる第2作業機械の拘束条件を示す第2機械データを取得する。プロセッサは、第1の人と異なる第2の人の拘束条件を示す第2人データを取得する。プロセッサは、第2機械データと第2人データとに基づいて、基準モーションデータを参照して、第2作業機械に対して所定の作業中の第2の人の動作と第2の人への反力とを算出する。プロセッサは、第2の人の動作と第2の人への反力とに基づいて第2の人への身体的な負担を示す身体指標を算出する。プロセッサは、身体指標に基づいて第2の人への身体的な負担を定量的に評価する。
【0007】
本開示の他の態様に係る方法は、作業機械に対して所定の作業中の人への身体的な負担を評価するためにコンピュータによって実行される方法である。作業機械と人とのそれぞれは、動作を規定する拘束条件を有する。当該方法は、第1作業機械に対して所定の作業中の第1の人の動作と、動作中の第1の人への反力とを示す基準モーションデータを取得することを備える。基準モーションデータには、第1作業機械の拘束条件を示す第1機械データと、第1の人の拘束条件を示す第1人データとが割り当てられている。当該方法は、第1作業機械と異なる第2作業機械の拘束条件を示す第2機械データを取得し、第1の人と異なる第2の人の拘束条件を示す第2人データを取得し、第2機械データと第2人データとに基づいて、基準モーションデータを参照して、第2作業機械に対して所定の作業中の第2の人の動作と第2の人への反力とを算出し、第2の人の動作と第2の人への反力とに基づいて第2の人への身体的な負担を示す身体指標を算出し、身体指標に基づいて第2の人への身体的な負担を定量的に評価すること、を備える。
【発明の効果】
【0008】
本開示によれば、第1作業機械に対して所定の作業中の第1の人の動作と、第1の人への反力とを示す基準モーションデータが予め取得されて、データベースに格納されている。また、基準モーションデータを参照することで、第2作業機械に対して所定の作業中の第2の人の動作と第2の人への反力とが算出され、それらに基づいて、第2の人への身体的な負担を示す身体指標が算出される。そして、身体指標に基づいて、第2の人への身体的な負担が定量的に評価される。そのため、作業機械に対して所定の作業中の人への身体的な負担を容易、且つ、精度よく評価することができる。
【図面の簡単な説明】
【0009】
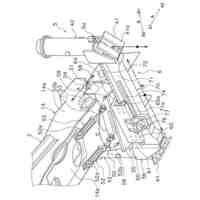
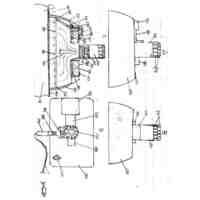
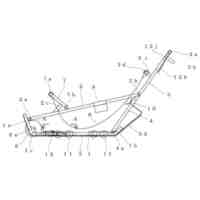
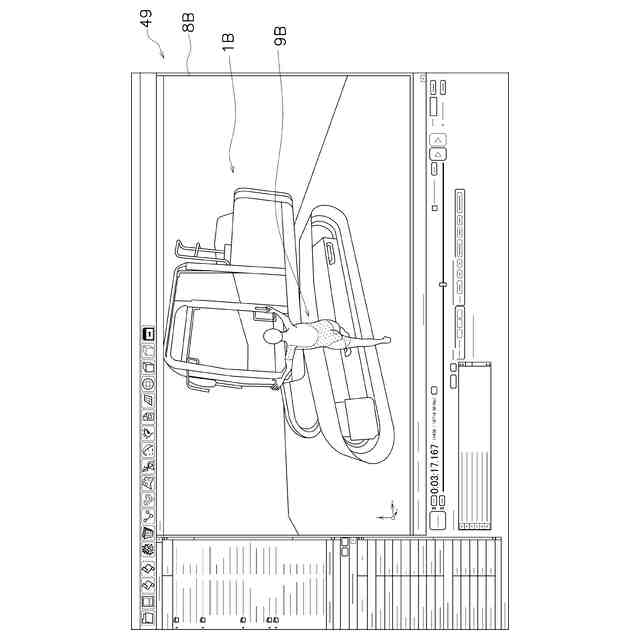
実施形態に係る第1作業機械の一例を示す斜視図である。
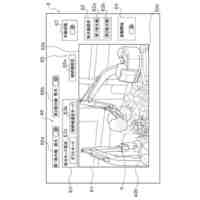
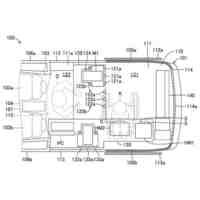
第1作業機械のキャブ内を示す上面図である。
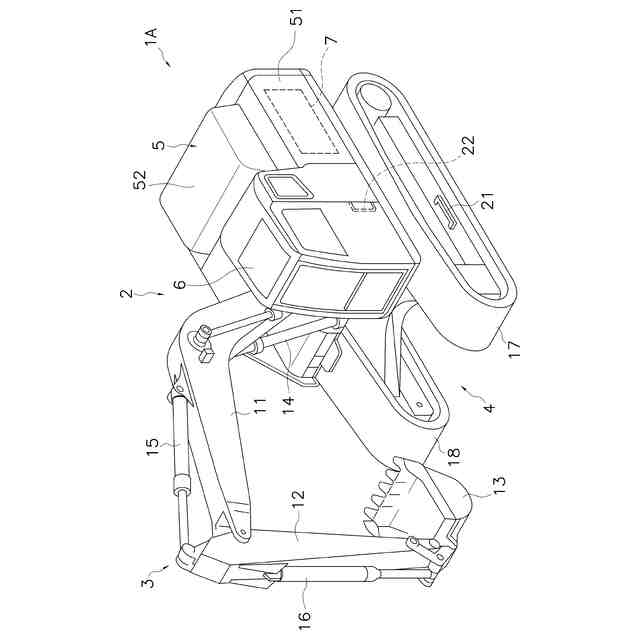
実施形態に係る動作推定・負担評価システムの構成を示すブロック図である。
コンピュータによって実行される動作推定処理、及び、負担評価処理を示すブロック図である。
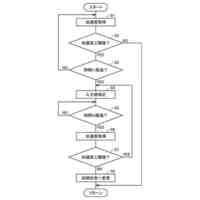
動作推定処理を示すフローチャートである。
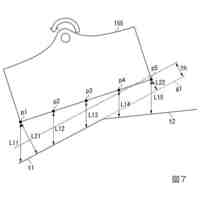
基準モーションデータの一例を示す図である。
基準モーションデータの一例を示す図である。
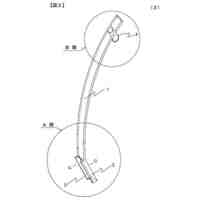
基準モーションデータの第1の人の各部の定義の一例を示す図である。
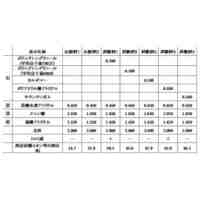
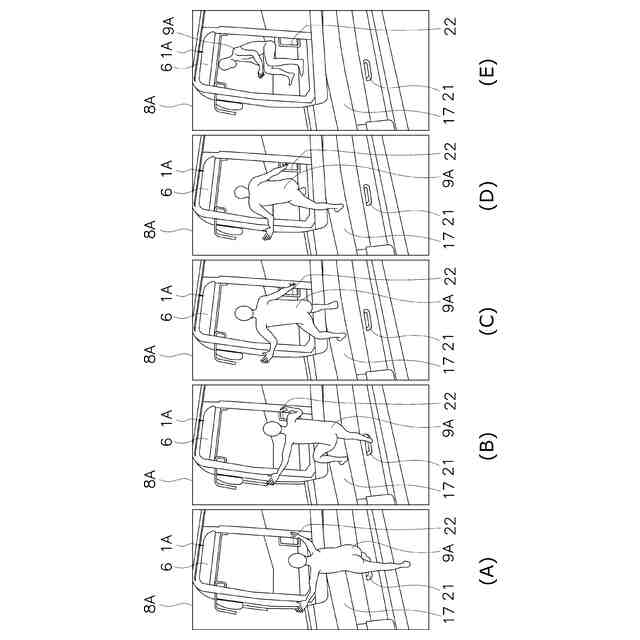
推定モーションデータの一例を示す図である。
基準モーションデータと推定モーションデータとの人の姿勢の違いを示す図である。
推定モーションデータの一例を示す図である。
負担評価処理を示すフローチャートである。
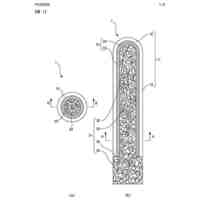
負担の評価結果の一例を示す図である。
負担の評価結果の一例を示す図である。
所定の作業の他の例を示す図である。
所定の作業のさらに他の例を示す図である。
【発明を実施するための形態】
【0010】
以下、実施形態に係る動作推定・負担評価システムについて、図面を参照しながら説明する。本実施形態に係る動作推定・負担評価システムは、作業機械に対して所定の作業中の人の動作を推定する。図1は、実施形態に係る作業機械の一例として、第1作業機械1Aを示す斜視図である。第1作業機械1Aは、例えば、油圧ショベルである。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社小松製作所
地下掘削装置
9日前
株式会社小松製作所
電動モータ及び作業機械
16日前
株式会社小松製作所
電動モータ及び作業機械
16日前
株式会社小松製作所
制御システム及び制御方法
4日前
株式会社小松製作所
作業機械および作業機械の制御方法
18日前
株式会社小松製作所
散水システムおよび散水機の制御方法
16日前
株式会社小松製作所
作業機械の制御システムおよび作業機械の制御方法
2日前
個人
健康器具
2か月前
個人
鼾防止用具
2か月前
個人
歯の掃除具
5か月前
個人
歯茎みが品
3か月前
個人
導電香
2か月前
個人
塗り薬塗り具
4か月前
個人
脈波測定方法
2か月前
個人
マッサージ機
2か月前
個人
脈波測定方法
2か月前
個人
白内障治療法
1か月前
個人
洗井間専家。
29日前
個人
クリップ
3か月前
個人
発熱器具
5か月前
個人
染毛方法
5か月前
個人
ホバーアイロン
17日前
個人
片足歩行支援具
3か月前
個人
健康器具
4か月前
個人
収納容器
4か月前
個人
車椅子持ち上げ器
1か月前
個人
眼科診療車
3か月前
個人
シャンプー
2日前
個人
口内洗浄具
2か月前
三生医薬株式会社
錠剤
1か月前
株式会社結心
手袋
1か月前
個人
避難困難者救出台車
3か月前
株式会社コーセー
美爪料
3か月前
個人
除菌システム
3か月前
株式会社コーセー
化粧料
3か月前
株式会社 MTG
浴用剤
2か月前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ