TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024148591
公報種別
公開特許公報(A)
公開日
2024-10-18
出願番号
2023061859
出願日
2023-04-06
発明の名称
教示方法
出願人
トヨタ自動車株式会社
代理人
弁理士法人明成国際特許事務所
主分類
B25J
9/22 20060101AFI20241010BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】教示作業の作業性が良い教示方法を提供すること。
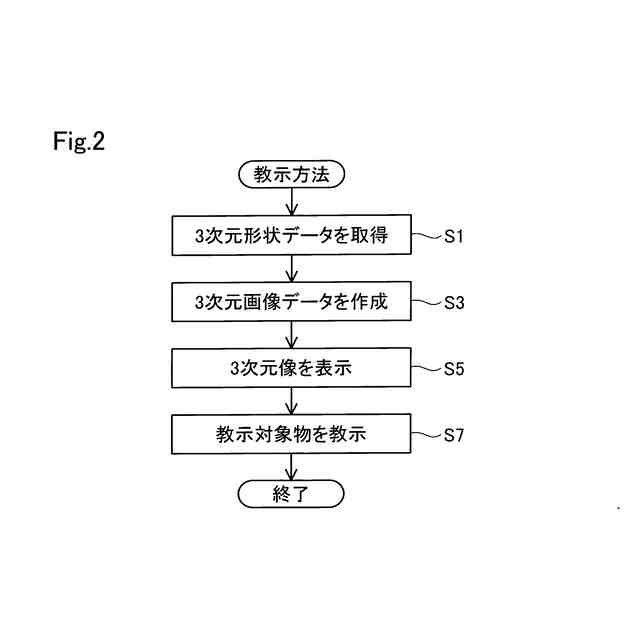
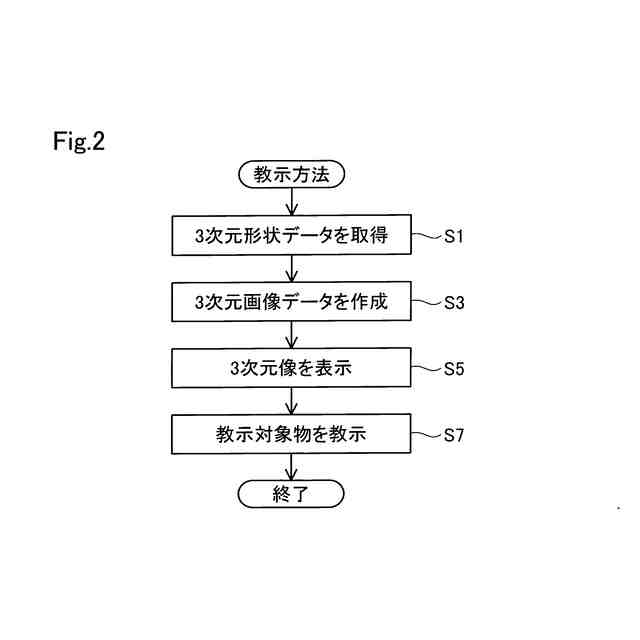
【解決手段】教示対象物の複数の3次元形状データであって、互いに異なる方向から取得された複数の3次元形状データを取得するステップと、複数の3次元形状データを用いて教示対象物の3次元画像データを作成するステップと、3次元画像データを用いて、教示対象物の3次元像を表示装置に表示させるステップと、表示装置に表示された教示対象物の3次元像を用いて、教示対象物を教示するステップと、を備える、教示方法。
【選択図】図2
特許請求の範囲
【請求項1】
教示方法であって、
教示対象物の複数の3次元形状データであって、互いに異なる方向から取得された複数の3次元形状データを取得するステップと、
前記複数の3次元形状データを用いて前記教示対象物の3次元画像データを作成するステップと、
前記3次元画像データを用いて、前記教示対象物の3次元像を表示装置に表示させるステップと、
前記表示装置に表示された前記教示対象物の3次元像を用いて、前記教示対象物を教示するステップと、を備える、教示方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、教示方法に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
従来、ロボットを教示する場合には、教示作業者は、ロボットに近い場所で教示を行う(例えば、特許文献1)。
【先行技術文献】
【特許文献】
【0003】
特開2021-65971号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、ロボットの周辺に十分な空間が無い場合には、教示作業者の動きや視界が制限されるため、教示作業が困難である。
【課題を解決するための手段】
【0005】
本開示は、以下の形態として実現することが可能である。
【0006】
(1)本開示の一形態によれば、教示方法が提供される。この教示方法は、教示対象物の複数の3次元形状データであって、互いに異なる方向から取得された複数の3次元形状データを取得するステップと、前記複数の3次元形状データを用いて前記教示対象物の3次元画像データを作成するステップと、前記3次元画像データを用いて、前記教示対象物の3次元像を表示装置に表示させるステップと、前記表示装置に表示された前記教示対象物の3次元像を用いて、前記教示対象物を教示するステップと、を備える。この形態によれば、教示作業者は、表示装置によって表示される3次元像を用いて教示できる。よって、教示対象物から離れた場所で教示作業を行うことができるため、教示作業者の動きや視界は制限されにくくなり、教示作業の作業性を向上させることができる。
本開示は、教示方法以外の種々の形態で実現することも可能である。例えば、教示システム等の形態で実現することができる。
【図面の簡単な説明】
【0007】
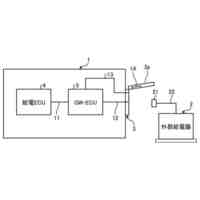
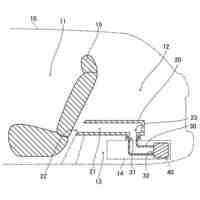
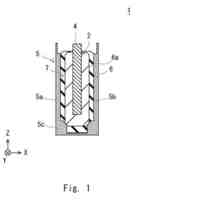
教示システムの構成を示す模式図。
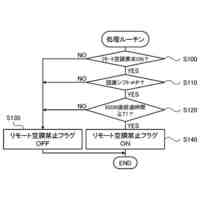
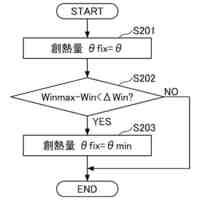
教示方法の手順を示すフローチャート。
【発明を実施するための形態】
【0008】
A.実施形態:
A1.教示システム:
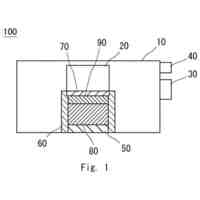
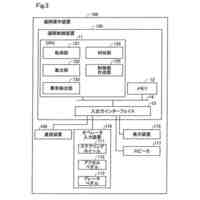
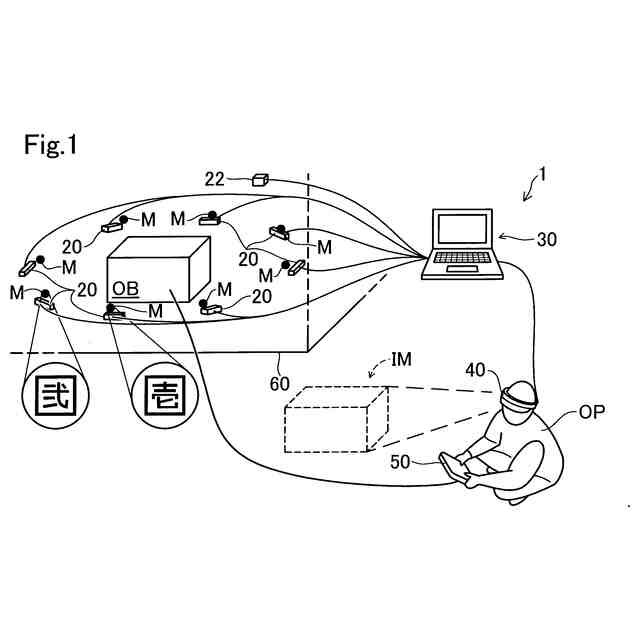
図1は、教示システム1の構成を示す模式図である。教示システム1は、教示対象物OBの教示を行うための教示システムである。教示対象物OBは、例えば産業用ロボットや、ロボットアームによってワークを移動させる装置などである。教示対象物OBには、教示作業者OPが教示に使用するティーチングペンダント50がケーブルを介して接続されている。教示対象物OBは、教示対象物OBの近辺への人の立ち入りを制限するための安全柵60内に設置されている。
【0009】
教示システム1は、複数の3Dスキャナ20と、画像取得装置22と、情報処理装置30と、表示装置としてのヘッドマウントディスプレイ40とを備える。3Dスキャナ20は、周期的に教示対象物OBの3次元形状データを取得し、取得した3次元形状データを情報処理装置30に送信する。本実施形態では、3Dスキャナ20は、教示対象物OBにレーザ光を照射し、教示対象物OBによって反射されたレーザ光をセンサによって検出することで、教示対象物OBの外形の3次元形状データを取得する非接触式の3Dスキャナである。3次元形状データは、座標データの集合である。3次元形状データは、3Dスキャナ20から教示対象物OBまでの深度情報を含む。さらに、本実施形態では、各3Dスキャナ20は、教示対象物OBの画像情報も取得する。複数の3Dスキャナ20は、互いに異なる方向から教示対象物OBの3次元形状データを取得する。具体的には、各3Dスキャナ20は、教示対象物OBの周りに、マグネット雲台や固定用治具を用いて固定されている。本実施形態では、6台の3Dスキャナ20が設置されているが、3Dスキャナ20の台数は、6台に限られない。なお、教示対象物OBの表面が金属の場合には、表面にテープなどを貼ることにより、取得する3次元形状データの精度を向上させることができる。
【0010】
各3Dスキャナ20の近傍には、位置合わせ用のマークMが設置されている。詳細には、マークMは、画像取得装置22がマークMの画像情報を取得可能な位置に設置されている。3Dスキャナ20の近傍とは、具体的には、3Dスキャナ20の上方や前方や後方である。本実施形態では、6台の3Dスキャナ20が配置されているため、対応して、6つのマークMが設置されている。マークMは、複数の3次元形状データを組み合わせて1つの3次元画像データを作成するために用いられる。マークMは、具体的には、平面図形である。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
トヨタ自動車株式会社
車両
10日前
トヨタ自動車株式会社
車両
9日前
トヨタ自動車株式会社
車両
2日前
トヨタ自動車株式会社
車両
2日前
トヨタ自動車株式会社
車両
2日前
トヨタ自動車株式会社
電動車
9日前
トヨタ自動車株式会社
ロータ
9日前
トヨタ自動車株式会社
充電器
3日前
トヨタ自動車株式会社
電動車
9日前
トヨタ自動車株式会社
自動車
2日前
トヨタ自動車株式会社
蓄電装置
12日前
トヨタ自動車株式会社
二次電池
9日前
トヨタ自動車株式会社
電動車両
9日前
トヨタ自動車株式会社
制御装置
2日前
トヨタ自動車株式会社
駆動装置
9日前
トヨタ自動車株式会社
製造方法
3日前
トヨタ自動車株式会社
駆動装置
9日前
トヨタ自動車株式会社
制御装置
4日前
トヨタ自動車株式会社
二次電池
9日前
トヨタ自動車株式会社
蓄電装置
12日前
トヨタ自動車株式会社
判定装置
4日前
トヨタ自動車株式会社
蓄電セル
10日前
トヨタ自動車株式会社
蓄電装置
10日前
トヨタ自動車株式会社
接合方法
10日前
トヨタ自動車株式会社
電動車両
3日前
トヨタ自動車株式会社
制御装置
9日前
トヨタ自動車株式会社
熱管理回路
12日前
トヨタ自動車株式会社
電池パック
4日前
トヨタ自動車株式会社
熱管理回路
12日前
トヨタ自動車株式会社
電池パック
4日前
トヨタ自動車株式会社
電池パック
4日前
トヨタ自動車株式会社
電気自動車
3日前
トヨタ自動車株式会社
電池パック
17日前
トヨタ自動車株式会社
プロテクタ
9日前
トヨタ自動車株式会社
全固体電池
2日前
トヨタ自動車株式会社
電池パック
2日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ