TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024146247
公報種別
公開特許公報(A)
公開日
2024-10-15
出願番号
2023059031
出願日
2023-03-31
発明の名称
作業機械の遠隔操作システム及び作業機械の遠隔操作方法
出願人
株式会社小松製作所
代理人
弁理士法人酒井国際特許事務所
主分類
H04Q
9/00 20060101AFI20241004BHJP(電気通信技術)
要約
【課題】作業機械に入力される操作量を遠隔操作装置の操作者に提供する遠隔操作システム。
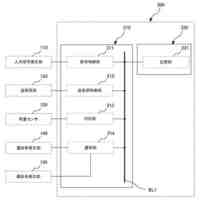
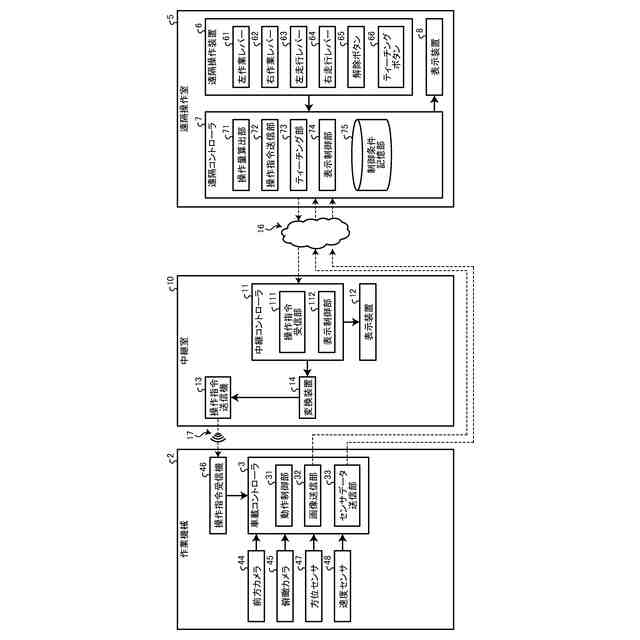
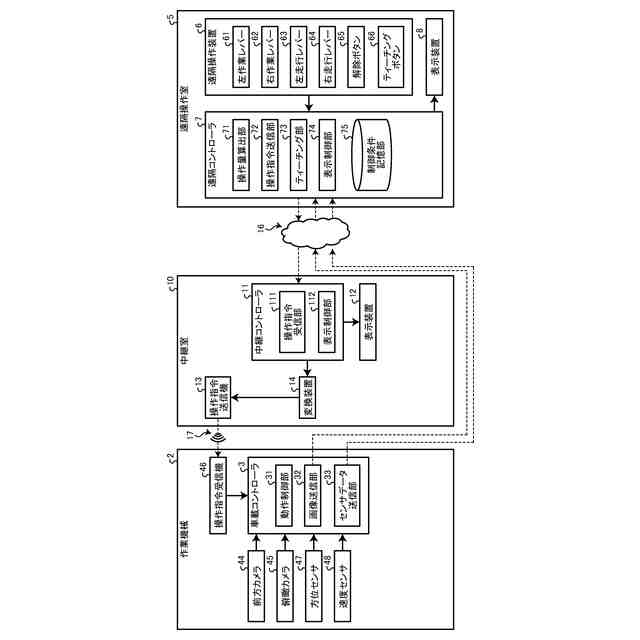
【解決手段】作業機械の遠隔操作システムにおいて、遠隔操作室5は、作業機械2を遠隔操作する遠隔操作装置6と、遠隔操作装置からの操作信号に基づいて、作業機械に入力される操作量を算出する操作量算出部71及び作業機械に入力される操作量を作業機械の外部の表示装置8に表示させる表示制御部74を含む遠隔コントローラ7と、を備える。
【選択図】図3
特許請求の範囲
【請求項1】
作業機械を遠隔操作する遠隔操作装置と、
前記遠隔操作装置からの操作信号に基づいて、前記作業機械に入力される操作量を算出する操作量算出部と、
前記操作量を前記作業機械の外部の表示装置に表示させる表示制御部と、を備える、
作業機械の遠隔操作システム。
続きを表示(約 1,200 文字)
【請求項2】
前記作業機械の制御条件を記憶する制御条件記憶部を備え、
前記操作量算出部は、前記操作信号と前記制御条件とに基づいて、前記操作量を算出する、
請求項1に記載の作業機械の遠隔操作システム。
【請求項3】
前記制御条件は、前記作業機械の可動体の可動範囲を含み、
前記操作量算出部は、前記可動範囲における前記可動体の位置に基づいて、前記操作量を算出する、
請求項2に記載の作業機械の遠隔操作システム。
【請求項4】
前記操作量算出部は、前記可動体が前記可動範囲の端部に近付くほど前記操作量が小さくなるように、前記操作量を算出する、
請求項3に記載の作業機械の遠隔操作システム。
【請求項5】
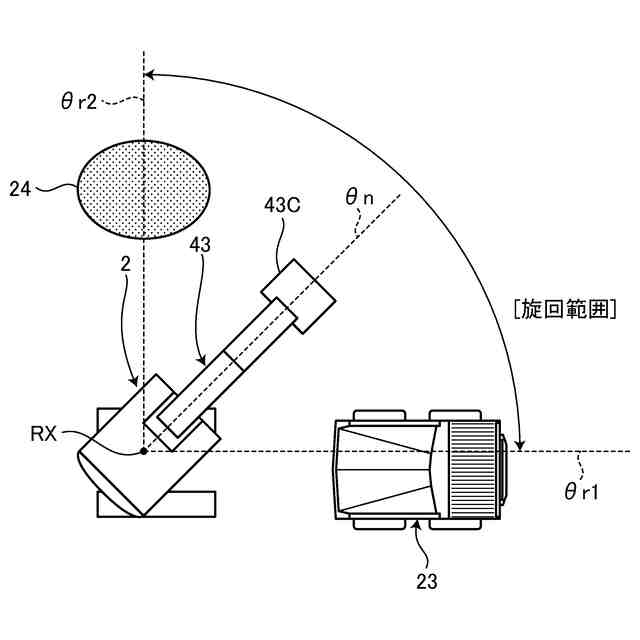
前記作業機械は、旋回体と、前記旋回体に支持される作業機と、を有し、
前記可動体は、前記旋回体を含み、
前記可動範囲は、前記旋回体の旋回範囲を含む、
請求項3又は請求項4に記載の作業機械の遠隔操作システム。
【請求項6】
前記作業機械は、前記旋回体の方位を検出する方位センサを有し、
前記操作量算出部は、前記方位センサの検出信号に基づいて、前記操作量を算出する、
請求項5に記載の作業機械の遠隔操作システム。
【請求項7】
前記操作量算出部は、前記操作量を含む第1操作指令を生成し、
前記操作量算出部から第1通信方式で送信された前記第1操作指令を第2操作指令に変換する変換装置と、
前記作業機械に第2通信方式で前記第2操作指令を送信する操作指令送信機と、を備え、
前記作業機械は、前記第2操作指令に基づいて動作する、
請求項1に記載の作業機械の遠隔操作システム。
【請求項8】
前記操作指令送信機は、前記作業機械が稼働する作業現場に配置され、
前記遠隔操作装置は、前記作業現場の遠隔地に配置される、
請求項7に記載の作業機械の遠隔操作システム。
【請求項9】
前記作業機械は、旋回体と、前記旋回体に支持される作業機と、を有し、
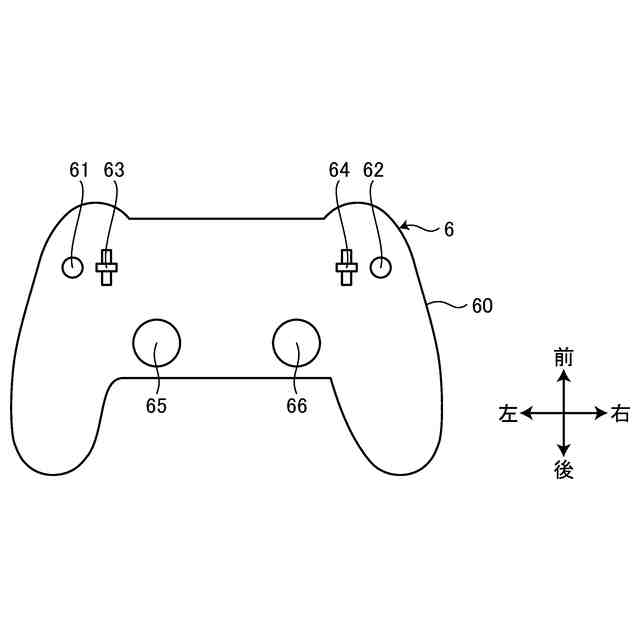
前記遠隔操作装置は、前記旋回体及び前記作業機を動作させるために操作される第1レバーと、前記作業機を動作させるために操作される第2レバーと、含み、
前記操作量は、前記第1レバーからの操作信号に基づいて算出される第1レバー操作量と、前記第2レバーからの操作信号に基づいて算出される第2レバー操作量と、を含む、
請求項1に記載の作業機械の遠隔操作システム。
【請求項10】
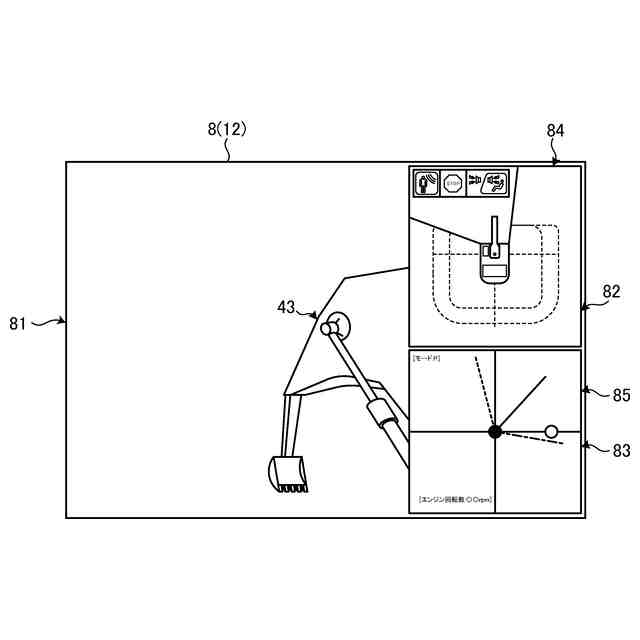
前記表示制御部は、
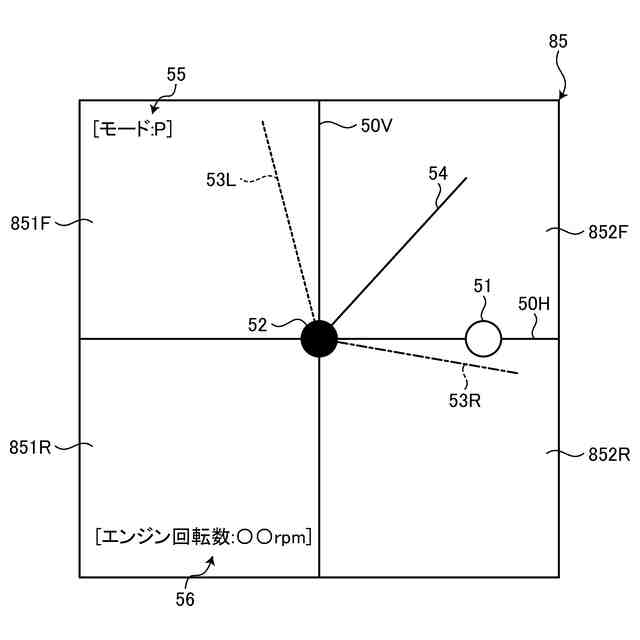
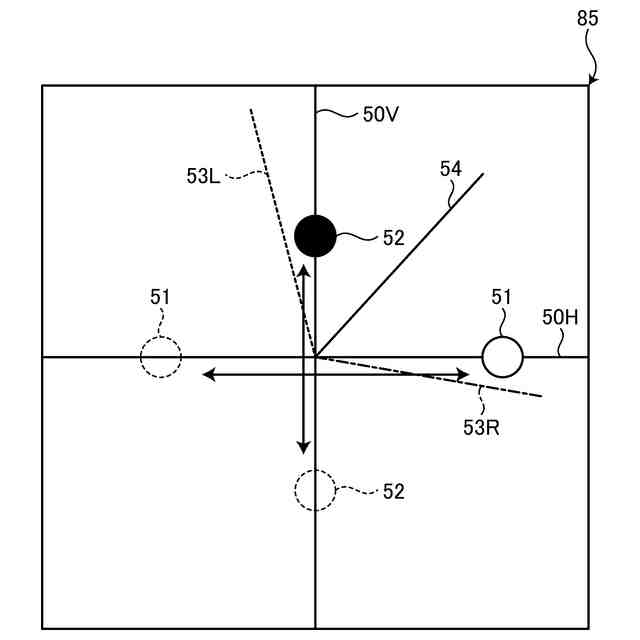
前記第1レバー操作量に基づいて、前記表示装置の表示画面において第1シンボルを移動させ、
前記第2レバー操作量に基づいて、前記表示画面において第2シンボルを移動させる、
請求項9に記載の作業機械の遠隔操作システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、作業機械の遠隔操作システム及び作業機械の遠隔操作方法に関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
作業機械の遠隔操作システムに係る技術分野において、特許文献1に開示されているような遠隔操作装置が知られている。
【先行技術文献】
【特許文献】
【0003】
特開平06-017444号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
遠隔操作システムにおいて、遠隔操作装置から送信された操作信号は、作業機械に入力される。作業機械は、入力される操作信号に基づいて動作する。遠隔操作装置の操作者が作業機械に入力される操作量を確認することができる技術が要望される。
【0005】
本開示は、作業機械に入力される操作量を遠隔操作装置の操作者に提供することを目的とする。
【課題を解決するための手段】
【0006】
本開示に従えば、作業機械を遠隔操作する遠隔操作装置と、遠隔操作装置からの操作信号に基づいて、作業機械に入力される操作量を算出する操作量算出部と、操作量を作業機械の外部の表示装置に表示させる表示制御部と、を備える、作業機械の遠隔操作システムが提供される。
【発明の効果】
【0007】
本開示によれば、作業機械に入力される操作量が遠隔操作装置の操作者に提供される。
【図面の簡単な説明】
【0008】
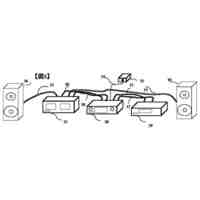
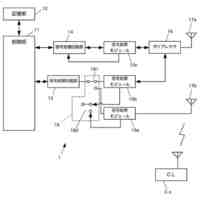
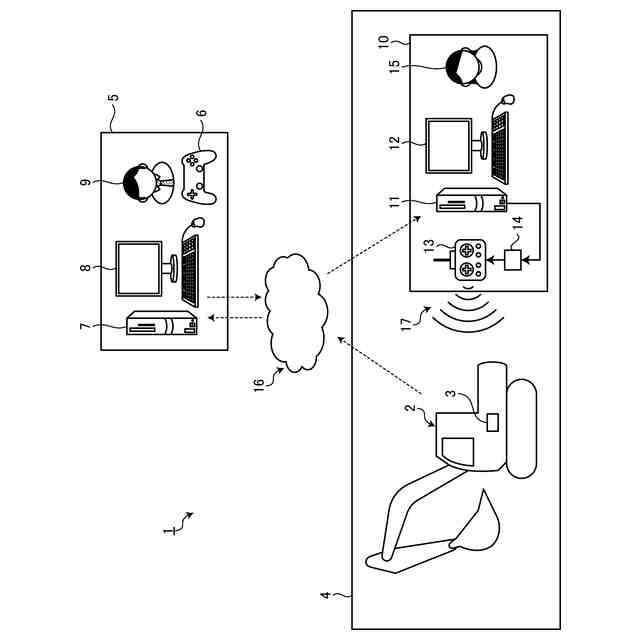
図1は、実施形態に係る作業機械の遠隔操作システムを模式的に示す図である。
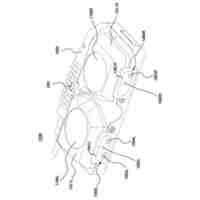
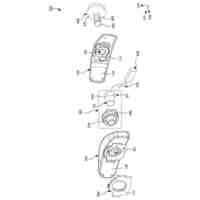
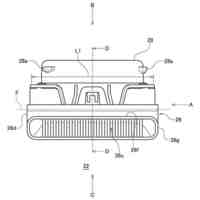
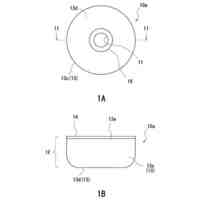
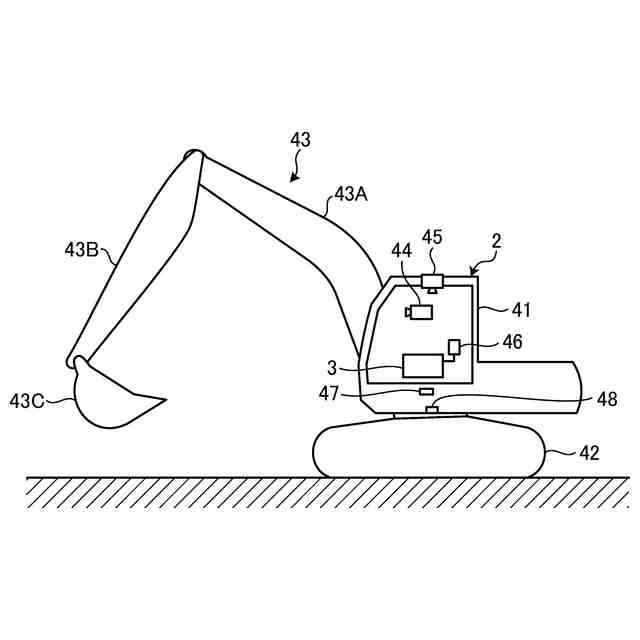
図2は、実施形態に係る作業機械を模式的に示す図である。
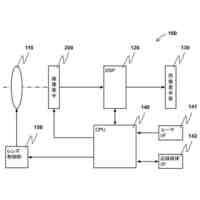
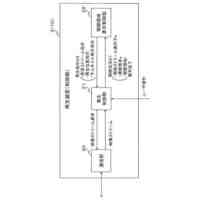
図3は、実施形態に係る遠隔操作システムを示すブロック図である。
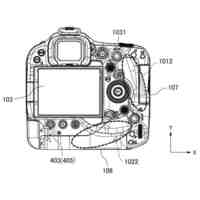
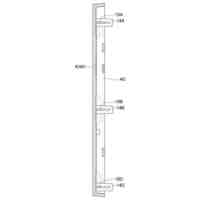
図4は、実施形態に係る遠隔操作装置を示す図である。
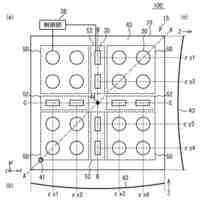
図5は、実施形態に係る表示装置の表示例を示す図である。
図6は、実施形態に係るティーチング処理を説明するための図である。
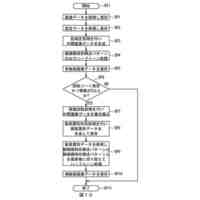
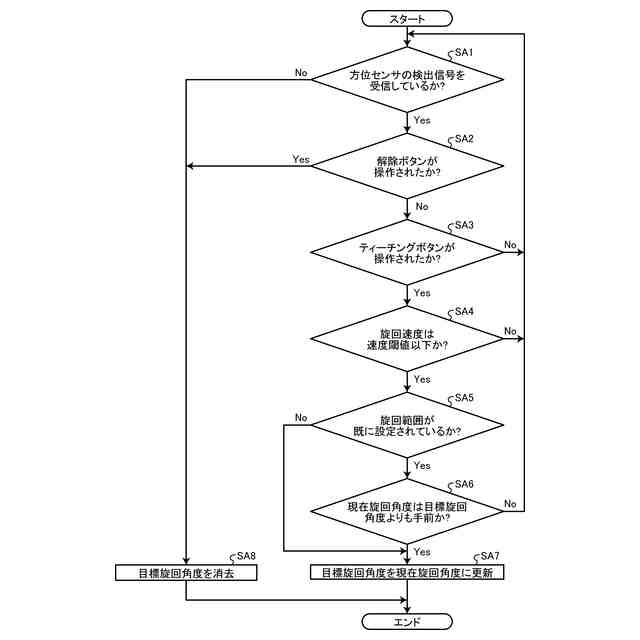
図7は、実施形態に係るティーチング処理を示すフローチャートである。
図8は、実施形態に係る操作量画像を示す図である。
図9は、実施形態に係る操作量画像を示す図である。
図10は、実施形態に係る操作量画像を示す図である。
図11は、実施形態に係る操作量画像を示す図である。
図12は、実施形態に係る操作量画像を示す図である。
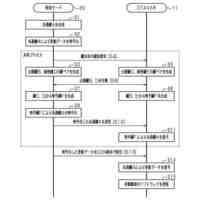
図13は、実施形態に係る遠隔操作方法を示すフローチャートである。
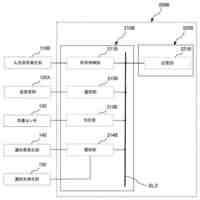
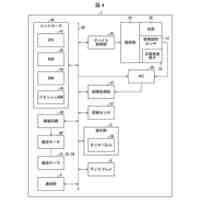
図14は、実施形態に係るコンピュータシステムを示すブロック図である。
【発明を実施するための形態】
【0009】
以下、本開示に係る実施形態について図面を参照しながら説明するが、本開示は実施形態に限定されない。以下で説明する実施形態の構成要素は適宜組み合わせることができる。また、一部の構成要素を用いない場合もある。
【0010】
[遠隔操作システムの概要]
図1は、実施形態に係る作業機械2の遠隔操作システム1を模式的に示す図である。遠隔操作システム1は、作業現場4で稼動する作業機械2を遠隔操作する。実施形態において、作業機械2は、油圧ショベルであることとする。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
仮想アース
1日前
個人
ヘッドホン
1か月前
個人
車両の制御装置
20日前
個人
スピーカーシステム
1か月前
株式会社シグマ
撮像装置
1か月前
キヤノン株式会社
表示装置
1か月前
キヤノン株式会社
撮像装置
1か月前
キヤノン株式会社
撮像装置
20日前
パイオニア株式会社
音響装置
24日前
個人
平面映像の回転による立体映像
13日前
パイオニア株式会社
音響装置
24日前
太陽誘電株式会社
超音波装置
9日前
パイオニア株式会社
音響装置
24日前
ブラザー工業株式会社
印刷装置
17日前
キヤノン株式会社
画像読取装置
9日前
沖電気工業株式会社
画像形成装置
27日前
大日本印刷株式会社
写真撮影装置
27日前
ブラザー工業株式会社
利用管理システム
1日前
アイホン株式会社
インターホン機器
1か月前
株式会社バッファロー
無線通信装置
20日前
アイホン株式会社
インターホン機器
14日前
株式会社小糸製作所
音発生ユニット
13日前
アイホン株式会社
インターホン機器
1か月前
ブラザー工業株式会社
画像読取装置
1か月前
TOA株式会社
IP放送の停止、切替制御
6日前
沖電気工業株式会社
装置
1か月前
株式会社ニコン
撮像素子
1か月前
日本精機株式会社
ヘッドアップディスプレイ
9日前
株式会社ニコン
撮像装置
14日前
日本放送協会
再生装置及びプログラム
24日前
積水ポリマテック株式会社
軟質触感体
1か月前
株式会社デンソー
通信装置
13日前
キヤノン株式会社
撮像装置
1か月前
トヨタ自動車株式会社
配信サーバ
24日前
コクヨ株式会社
情報端末及びプログラム
17日前
株式会社JVCケンウッド
煙可視化装置
20日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ