TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024145500
公報種別
公開特許公報(A)
公開日
2024-10-15
出願番号
2023057878
出願日
2023-03-31
発明の名称
モジュール式液圧ジョイントシステム、モジュール式液圧ジョイントシステムの制御方法
出願人
日立GEニュークリア・エナジー株式会社
代理人
ポレール弁理士法人
主分類
F15B
11/08 20060101AFI20241004BHJP(流体圧アクチュエータ;水力学または空気力学一般)
要約
【課題】アクチュエータの液圧駆動装置において、用途に応じて機能の変更や拡張が容易なモジュール式液圧ジョイントシステムを提供。
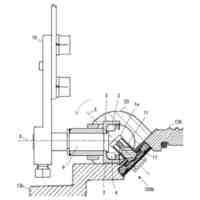
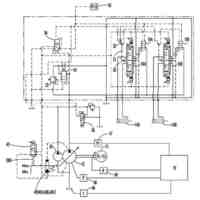
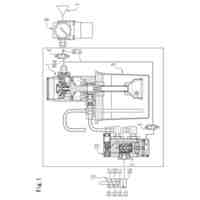
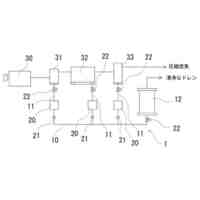
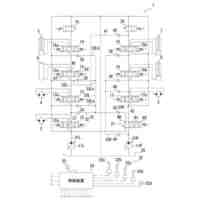
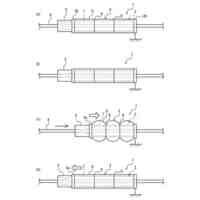
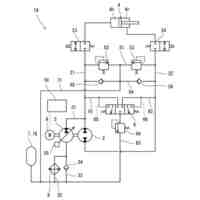
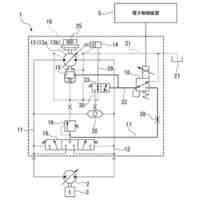
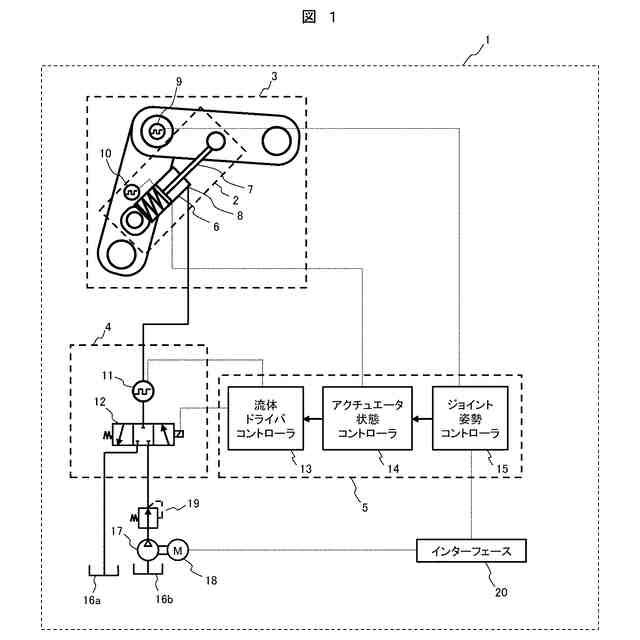
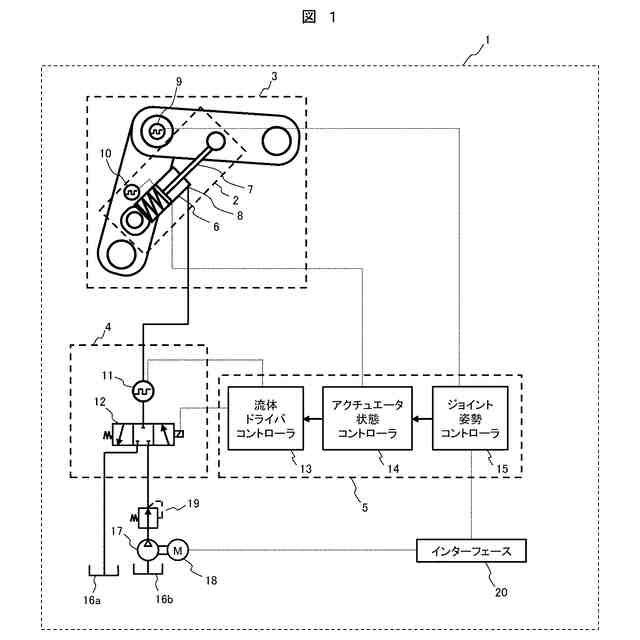
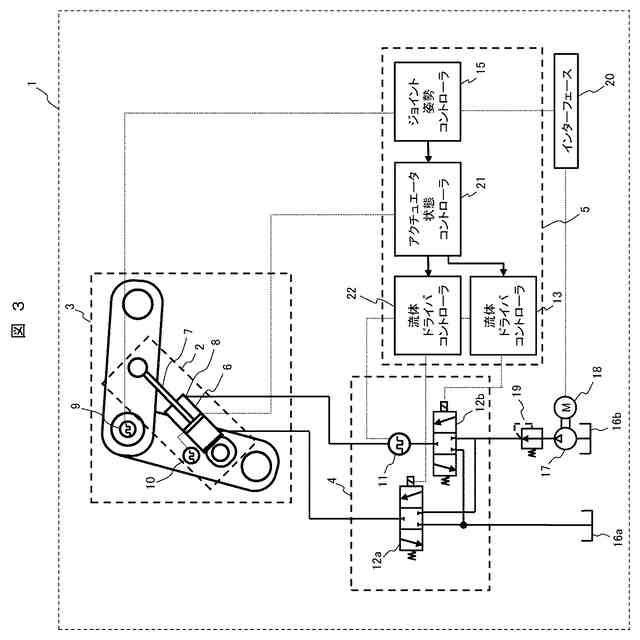
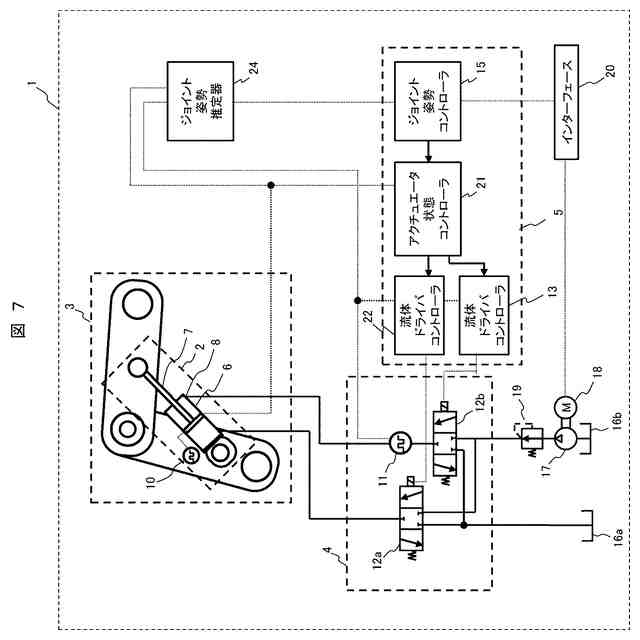
【解決手段】液圧アクチュエータ6と、液圧アクチュエータ6に設けられた状態センサ10と、を有するアクチュエータユニット2と、アクチュエータユニット2の駆動力を伝達する伝達機構と、伝達機構に設けられた姿勢センサ9とを有するジョイントユニット3と、液圧アクチュエータ6の流体を制御する操作弁12と、流体の物理量を検出する流体センサ11とを有する流体ドライバユニット4と、状態センサ10の情報に基づいて液圧アクチュエータ6の状態を制御するアクチュエータ状態コントローラ14と、姿勢センサ9の情報に基づいて伝達機構の姿勢を制御するジョイント姿勢コントローラ15と、流体ドライバユニット4の流体を制御する流体ドライバコントローラ13とが分割可能に構成されたコントローラユニット5を備える。
【選択図】図1
特許請求の範囲
【請求項1】
液圧アクチュエータと、前記液圧アクチュエータの駆動部に設けられた状態センサ、または状態推定ユニットと、を有するアクチュエータユニットと、
前記アクチュエータユニットと、前記アクチュエータユニットの駆動力を伝達する伝達機構と、前記伝達機構に設けられた姿勢センサ、または姿勢推定ユニットと、を有するジョイントユニットと、
前記液圧アクチュエータの流体を制御する操作弁と、前記流体の物理量を検出する流体センサと、を有する流体ドライバユニットと、
前記状態センサまたは状態推定ユニットの情報に基づいて前記液圧アクチュエータの状態を制御するアクチュエータ状態コントローラと、前記姿勢センサまたは姿勢推定ユニットの情報に基づいて前記伝達機構の姿勢を制御するジョイント姿勢コントローラと、前記流体ドライバユニットの流体を制御する流体ドライバコントローラと、が分割可能に構成されたコントローラユニットと、
を備えることを特徴とするモジュール式液圧ジョイントシステム。
続きを表示(約 1,700 文字)
【請求項2】
請求項1に記載のモジュール式液圧ジョイントシステムであって、
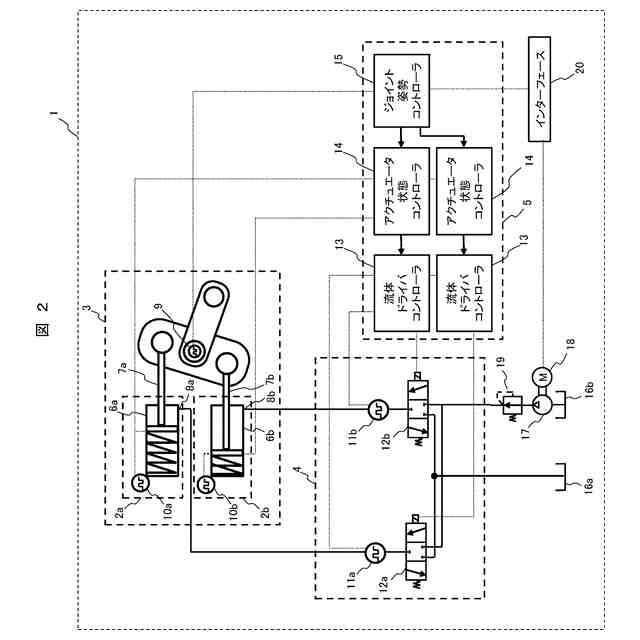
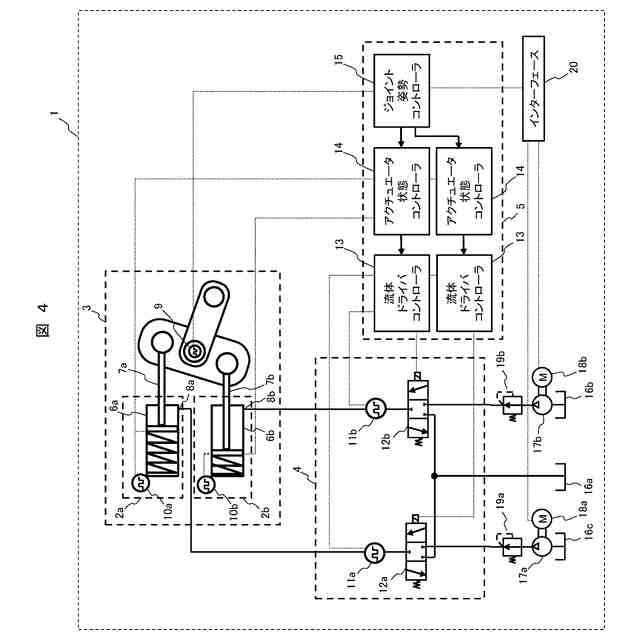
前記ジョイントユニットは、前記アクチュエータユニットを複数有し、
前記流体ドライバユニットは、前記複数のアクチュエータユニットの各々の流体を制御する操作弁を複数有し、
前記コントローラユニットは、前記複数の操作弁の各々を制御する前記アクチュエータ状態コントローラおよび前記流体ドライバコントローラをそれぞれ複数有することを特徴とするモジュール式液圧ジョイントシステム。
【請求項3】
請求項1に記載のモジュール式液圧ジョイントシステムであって、
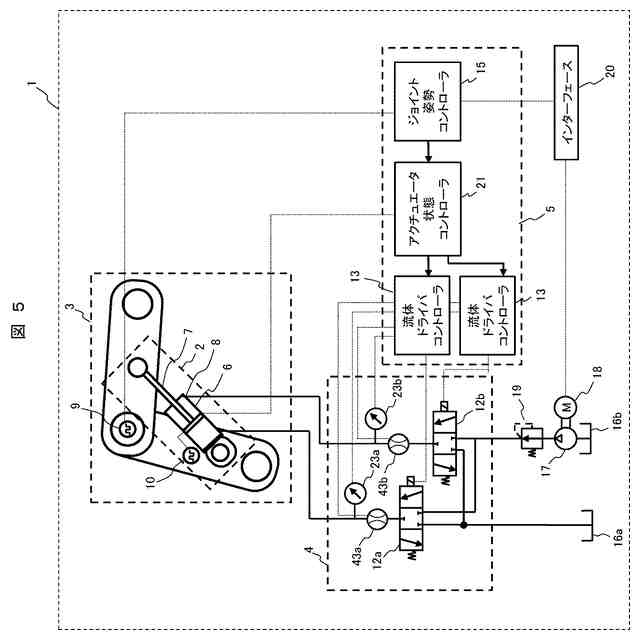
前記アクチュエータユニットは、マルチポートの液圧アクチュエータを1つ有し、
前記流体ドライバユニットは、前記マルチポート液圧アクチュエータの各ポートの流体を制御する操作弁をそれぞれ有し、
前記コントローラユニットは、各操作弁を制御する前記流体ドライバコントローラをそれぞれ有することを特徴とするモジュール式液圧ジョイントシステム。
【請求項4】
請求項2に記載のモジュール式液圧ジョイントシステムであって、
前記複数のアクチュエータユニットの各々は、前記複数の操作弁を介してそれぞれ異なるポンプにより流体が供給されることを特徴とするモジュール式液圧ジョイントシステム。
【請求項5】
請求項3に記載のモジュール式液圧ジョイントシステムであって、
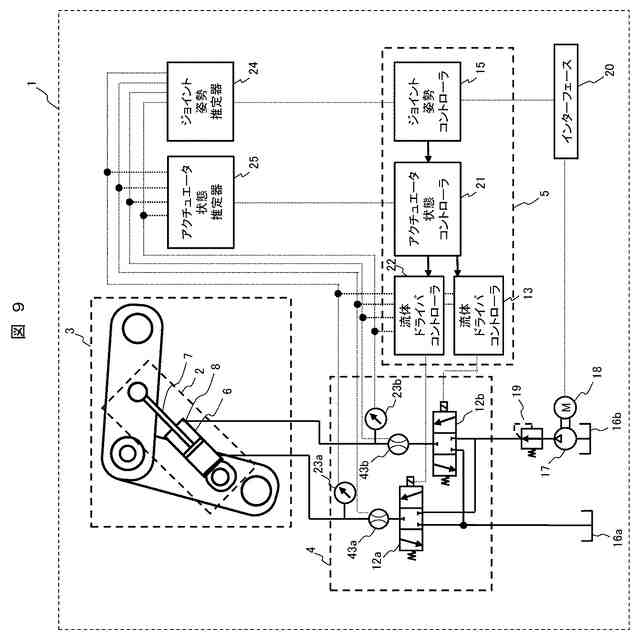
前記流体ドライバユニットは、前記各操作弁の各々の出口側の流体の物理量を検出する前記流体センサをそれぞれ有することを特徴とするモジュール式液圧ジョイントシステム。
【請求項6】
請求項4に記載のモジュール式液圧ジョイントシステムであって、
前記複数のアクチュエータユニットの各々は、複数のポンプにより流体が供給され、
前記複数のポンプの各々は、前記コントローラユニットにより制御されることを特徴とするモジュール式液圧ジョイントシステム。
【請求項7】
請求項1に記載のモジュール式液圧ジョイントシステムであって、
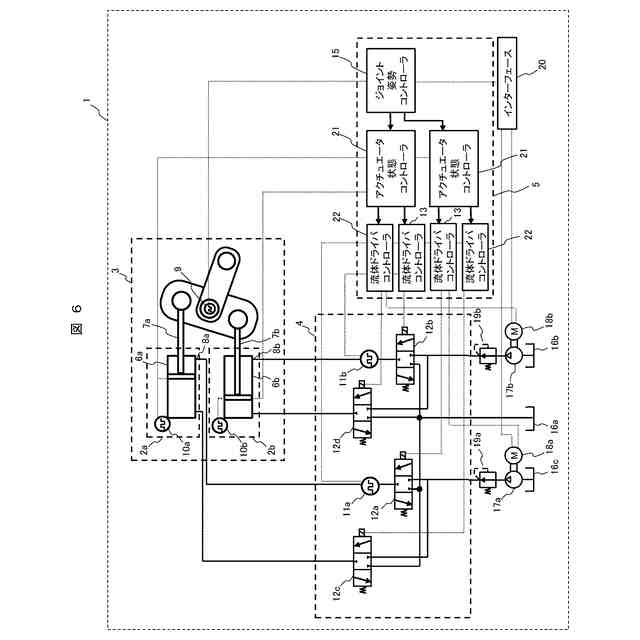
前記ジョイントユニットは、前記アクチュエータユニットを複数有し、
前記複数のアクチュエータユニットの各々は、マルチポートの液圧アクチュエータをそれぞれ有し、
前記流体ドライバユニットは、複数の前記マルチポート液圧アクチュエータの各ポートの流体を制御する操作弁をそれぞれ有し、かつ、前記操作弁の各々の出口側の流体の物理量を検出する前記流体センサをそれぞれ有することを特徴とするモジュール式液圧ジョイントシステム。
【請求項8】
請求項1から7のいずれか1項に記載のモジュール式液圧ジョイントシステムであって、
前記流体センサの検出値に基づいて前記伝達機構の姿勢を推定するジョイント姿勢推定器を備え、
前記ジョイント姿勢コントローラは、前記ジョイント姿勢推定器の推定値に基づいて前記伝達機構の姿勢を制御することを特徴とするモジュール式液圧ジョイントシステム。
【請求項9】
請求項1から7のいずれか1項に記載のモジュール式液圧ジョイントシステムであって、
前記状態センサの検出値に基づいて前記伝達機構の姿勢を推定するジョイント姿勢推定器を備え、
前記ジョイント姿勢コントローラは、前記ジョイント姿勢推定器の推定値に基づいて前記伝達機構の姿勢を制御することを特徴とするモジュール式液圧ジョイントシステム。
【請求項10】
請求項1から7のいずれか1項に記載のモジュール式液圧ジョイントシステムであって、
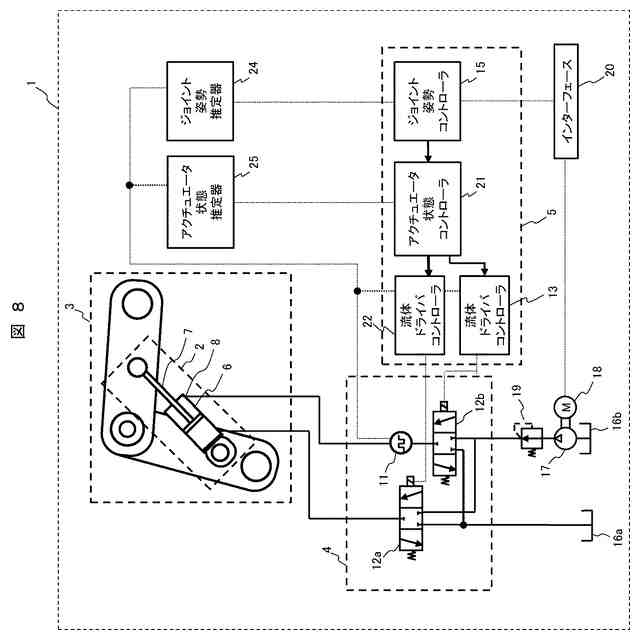
前記流体センサの検出値に基づいて前記アクチュエータユニットの状態を推定するアクチュエータ状態推定器を備え、
前記アクチュエータ状態コントローラは、前記アクチュエータ状態推定器の推定値に基づいて前記アクチュエータユニットの状態を制御することを特徴とするモジュール式液圧ジョイントシステム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、液圧でアクチュエータを駆動制御する液圧駆動装置の構成とその制御方法に係り、特に、用途に応じて機能の変更や拡張が容易なモジュール式液圧駆動装置に関する。
続きを表示(約 1,100 文字)
【背景技術】
【0002】
水や油などの流体の液圧によって駆動される動力伝達機構は、比較的簡単な制御で高出力特性が得られるため、土木建設機械や産業機械、農業機械等、様々な分野で広く利用されている。これらの用途の1つに、重い物体を持ち上げることができるロボットマニピュレータがある。
【0003】
液圧駆動による従来のロボットシステムの多くは、ある特定の目的を果たすために設計される場合が多く、用途や動作に様々な制約をもたらすことがある。一方、交換可能な複数の機能単位、部品を組み合わせて構成するモジュラーロボットシステムでは、様々な機能を統合させることで広く柔軟性を確保することができ、かつそれぞれを再構成することも可能である。モジュラーロボットシステムは、タスク要求に適合し、環境変化に対応し、単一のプラットフォームを使用して様々な機能を容易に拡張できるため、ロボットアプリケーションにおいて有用である。
【0004】
また、モジュラーロボットシステムを実現するためには、アクチュエータやセンサを含むジョイントシステム(関節システム)のモジュール設計が必要である。システムのモジュール設計は、システム開発サイクルを加速するのにも有用である。
【0005】
本技術分野の背景技術として、例えば、特許文献1のような技術がある。特許文献1には、ロボットエンドエフェクタのためのモジュール式プラットフォームが開示されている。
【0006】
また、特許文献2には、再構成可能なモジュラージョイント及びそれを用いたロボットが開示されている。
【先行技術文献】
【特許文献】
【0007】
米国特許出願公開第2019/0366553号明細書
米国特許第6084373号明細書
【発明の概要】
【発明が解決しようとする課題】
【0008】
ところで、ロボットシステムにモジュール設計を適用した場合、モジュール構成に基づいてジョイント特性とフィードバック応答が劇的に変化するため、制御性の複雑さが増す。
【0009】
また、液圧駆動のロボットシステムは、基本的に非線形性であり、複雑性が性能を低下させるといった課題もある。
【0010】
さらに、液圧駆動のロボットシステムの多くは、過酷な環境下で使用されるため、容易に分解して機能の変更や拡張することが求められ、その開発サイクルにも迅速さが要求される。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
旭精工株式会社
ピストン構造
4か月前
アズビル株式会社
ポジショナ
2か月前
株式会社不二越
油圧駆動装置
1か月前
株式会社コスメック
圧油給排システム
6か月前
株式会社フクハラ
ドレン排出構造
6か月前
株式会社クボタ
作業車
1か月前
ヤンマーホールディングス株式会社
作業機械
1か月前
川崎重工業株式会社
液圧駆動システム
1か月前
藤倉コンポジット株式会社
シリンダ装置
4か月前
個人
空圧式アクチュエータ
4か月前
SMC株式会社
シリンダ装置
3か月前
株式会社工営
シリンダー保護カバー
20日前
ヤンセン・サイエンシズ・アイルランド・アンリミテッド・カンパニー
GDF15融合タンパク質及びその使用
4か月前
三和テッキ株式会社
油圧シリンダ用油圧ユニット
1か月前
デンカ株式会社
アクチュエータ
2か月前
川崎重工業株式会社
マルチコントロールバルブ
5か月前
和光工業株式会社
シリンダ及び昇降装置
6か月前
学校法人 中央大学
移動装置
3か月前
株式会社ユキテック
流体式アクチュエータ
6か月前
カヤバ株式会社
流体圧機器
1か月前
住友重機械工業株式会社
駆動装置、駆動方法
3か月前
アズビル株式会社
パイロットリレー及びポジショナ
今日
カヤバ株式会社
流体圧シリンダ
7か月前
カヤバ株式会社
流体圧制御装置
5か月前
川崎重工業株式会社
液圧システム
4か月前
川崎重工業株式会社
液圧システム
4か月前
株式会社小松製作所
作業機械
5か月前
株式会社小松製作所
作業機械
3か月前
ダイキン工業株式会社
液圧ユニット
1か月前
三和テッキ株式会社
油圧ポンプユニットの送り速度切替バルブ装置
1か月前
カヤバ株式会社
インレットハウジング
2か月前
株式会社クボタ
作業機及び作業機の制御方法
1か月前
ナブテスコ株式会社
制御弁及び建設機械
1か月前
ナブテスコ株式会社
液圧モータユニット
5か月前
オークマ株式会社
油圧システム
6か月前
SMC株式会社
シリンダ装置
5か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ