TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024077789
公報種別
公開特許公報(A)
公開日
2024-06-10
出願番号
2022189946
出願日
2022-11-29
発明の名称
作業機械
出願人
株式会社小松製作所
代理人
弁理士法人酒井国際特許事務所
主分類
F15B
11/00 20060101AFI20240603BHJP(流体圧アクチュエータ;水力学または空気力学一般)
要約
【課題】作業機の操作性の悪化を抑制すること。
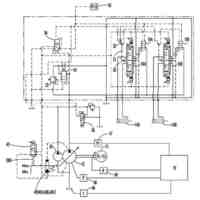
【解決手段】第1走行モータ7に供給される作動油の流量及び方向を制御する第1走行操作弁13と、油圧ポンプ11から第2走行モータ8に供給される作動油の流量及び方向を制御する第2走行操作弁14と、作業機操作弁15と、第1導入流路を介して信号流路に接続され、第1走行操作弁13の第1圧力補償弁と、第2導入流路を介して信号流路に接続され、第2走行操作弁14の第2圧力補償弁と、第2導入流路の少なくとも一部をバイパスするバイパス流路と、第1走行操作弁13と第2走行操作弁14とを連結する連結流路20に配置される走行連通弁26と、作動油の温度を示す作動油温度を検出する温度センサ27と、第1走行操作弁13及び第2走行操作弁14が中立位置に配置されている状態で、温度センサ27の検出データに基づいて、走行連通弁26のストロークを調整する制御装置6と、を備える。
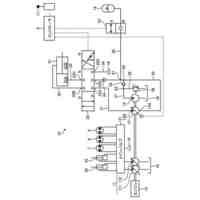
【選択図】図2
特許請求の範囲
【請求項1】
ポンプ吐出圧と信号流路を介して入力される負荷圧に応じたロードセンシング圧との差圧に基づいて作動油の吐出量を変化させる油圧ポンプと、
前記油圧ポンプから供給される前記作動油により駆動する第1走行モータと、
前記油圧ポンプから供給される前記作動油により駆動する第2走行モータと、
前記油圧ポンプから供給される前記作動油により駆動する作業機シリンダと、
前記油圧ポンプから前記第1走行モータに供給される前記作動油の流量及び方向を制御する第1走行操作弁と、
前記油圧ポンプから前記第2走行モータに供給される前記作動油の流量及び方向を制御する第2走行操作弁と、
前記油圧ポンプから前記作業機シリンダに供給される前記作動油の流量及び方向を制御する作業機操作弁と、
第1導入流路を介して前記信号流路に接続され、前記ロードセンシング圧に基づいて前記第1走行操作弁の前後差圧を補償する第1圧力補償弁と、
第2導入流路を介して前記信号流路に接続され、前記ロードセンシング圧に基づいて前記第2走行操作弁の前後差圧を補償する第2圧力補償弁と、
前記第2導入流路の少なくとも一部をバイパスするバイパス流路と、
前記第1走行操作弁と前記第2走行操作弁とを連結する連結流路に配置される走行連通弁と、
前記作動油の温度を示す作動油温度を検出する温度センサと、
前記第1走行操作弁及び前記第2走行操作弁のそれぞれが中立位置に配置されている状態で、前記温度センサの検出データに基づいて、前記走行連通弁のストロークを調整する制御装置と、を備える、
作業機械。
続きを表示(約 960 文字)
【請求項2】
前記走行連通弁のストロークが調整されることにより前記走行連通弁の開口面積が調整され、
前記制御装置は、前記作動油温度が低いほど前記開口面積を大きくし、前記作動油温度が高いほど前記開口面積を小さくする、
請求項1に記載の作業機械。
【請求項3】
前記制御装置は、前記作動油温度が第1温度閾値以下のときに前記走行連通弁を全開にし、前記作動油温度が第2温度閾値以上のときに前記走行連通弁を全閉にする、
請求項1に記載の作業機械。
【請求項4】
前記ポンプ吐出圧を検出する圧力センサを備え、
前記制御装置は、前記温度センサの検出データ及び前記圧力センサの検出データに基づいて、前記走行連通弁のストロークを調整する、
請求項1に記載の作業機械。
【請求項5】
前記制御装置は、前記ポンプ吐出圧が第1圧力閾値以下のときに前記走行連通弁を全開にし、前記ポンプ吐出圧が第2圧力閾値以上のときに前記走行連通弁を全閉にする、
請求項4に記載の作業機械。
【請求項6】
前記制御装置は、前記作業機操作弁を作動させるときに、前記走行連通弁のストロークを調整する、
請求項1に記載の作業機械。
【請求項7】
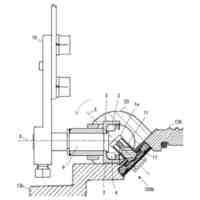
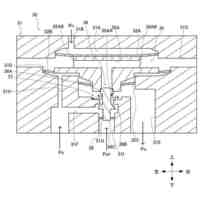
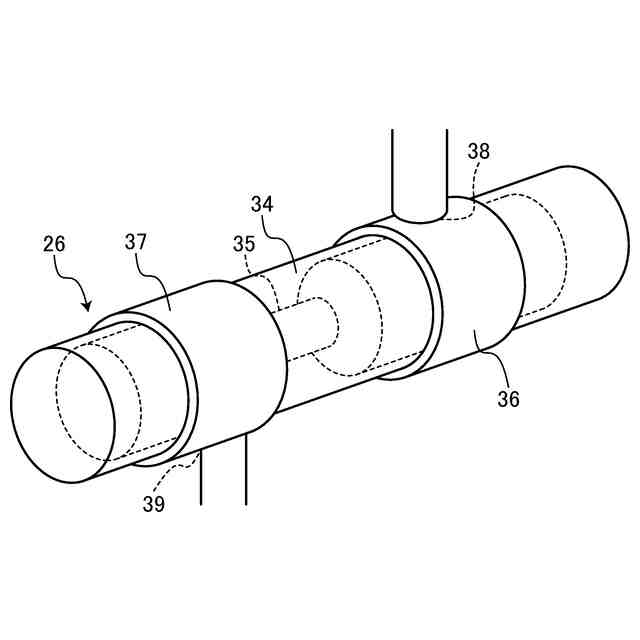
前記走行連通弁は、バルブボディと、前記バルブボディの内側で移動可能なスプールと、を有し、
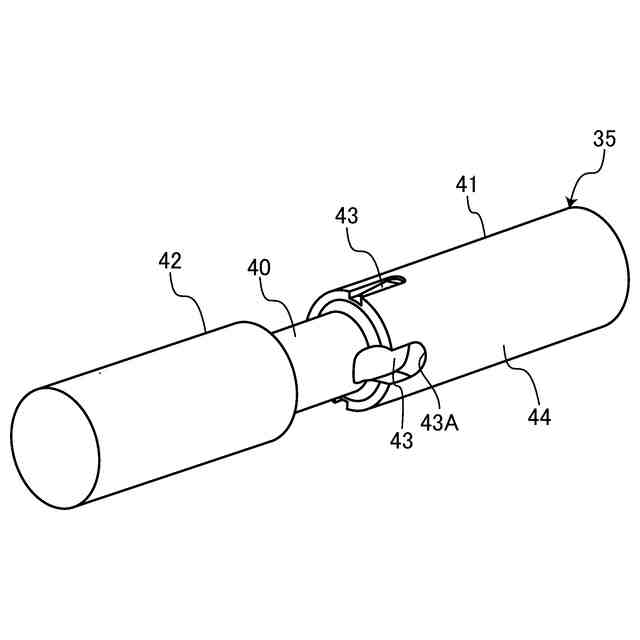
前記スプールは、小径ロッド部と、前記小径ロッド部に接続される大径ロッド部と、を有し、
前記作動油が流れる前記走行連通弁の開口は、前記小径ロッド部の周囲及び前記大径ロッド部に設けられた切欠部の周囲に形成される切欠開口と、前記大径ロッド部と前記バルブボディとの間に形成される隙間開口と、を含み、
前記スプールは、前記バルブボディの流入口からの作動油が前記切欠開口に流入する第1移動範囲と、前記流入口からの作動油が前記隙間開口に流入する第2移動範囲と、を移動し、
前記走行連通弁のストロークを調整することは、前記第1移動範囲において前記スプールの位置を変更すること、及び前記第2移動範囲において前記スプールの位置を変更することを含む、
請求項1に記載の作業機械。
発明の詳細な説明
【技術分野】
【0001】
本開示は、作業機械に関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
作業機械に係る技術分野において、特許文献1に開示されているような、ロードセンシング制御回路を有する作業機械が知られている。ロードセンシングシステムにおいては、油圧ポンプからの作動油の吐出圧と油圧アクチュエータの負荷圧に応じたロードセンシング圧(LS圧)との差圧に基づいて、油圧ポンプからの作動油の吐出量が調整される。また、負荷圧が高いほどLS圧が低下するLSドロップ特性が知られている。
【先行技術文献】
【特許文献】
【0003】
特開2006-336730号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
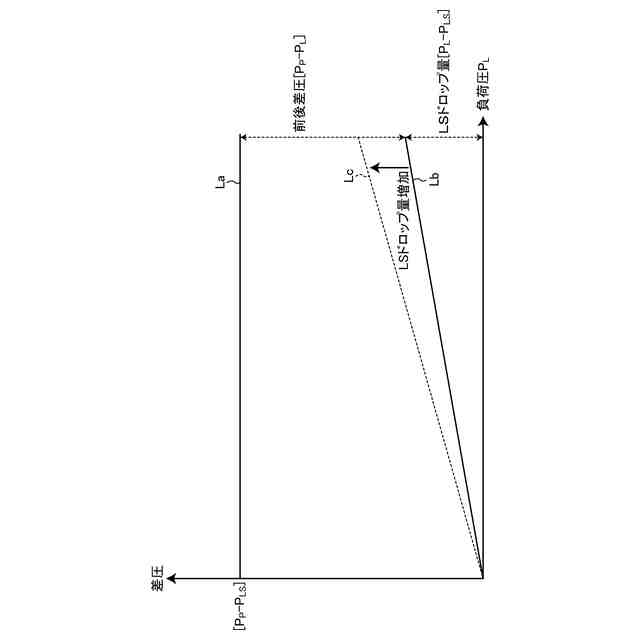
ロードセンシングシステムにおいては、LS導入絞りにより負荷圧の低下量を示すLSドロップ量が設定される。作動油の温度が変化すると作動油の粘度が変化し、その結果、LSドロップ量が変動してしまう可能性がある。LSドロップ量が変動すると、適正なLS圧が得られない可能性がある。適正なLS圧が得られないと、例えば作業レバーの操作量と作業機の動作速度とが整合しなくなったり、作業機がハンチングしたりするなど、作業機の操作性が悪化する可能性がある。
【0005】
本開示は、作業機の操作性の悪化を抑制することを目的とする。
【課題を解決するための手段】
【0006】
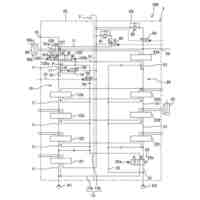
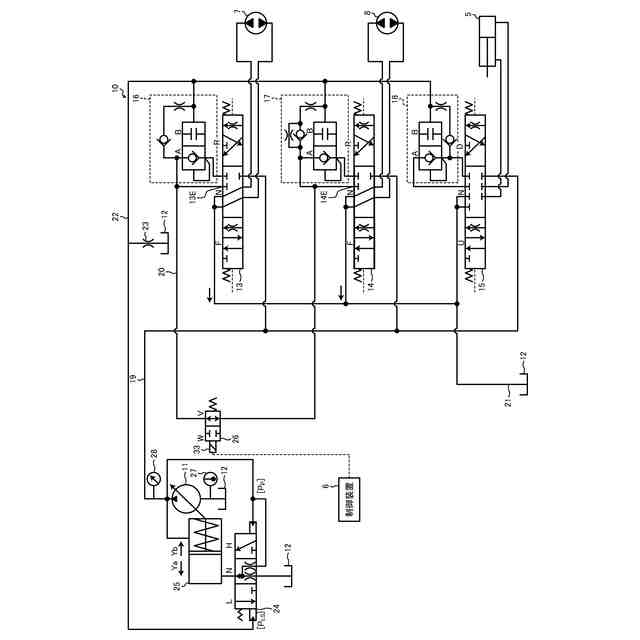
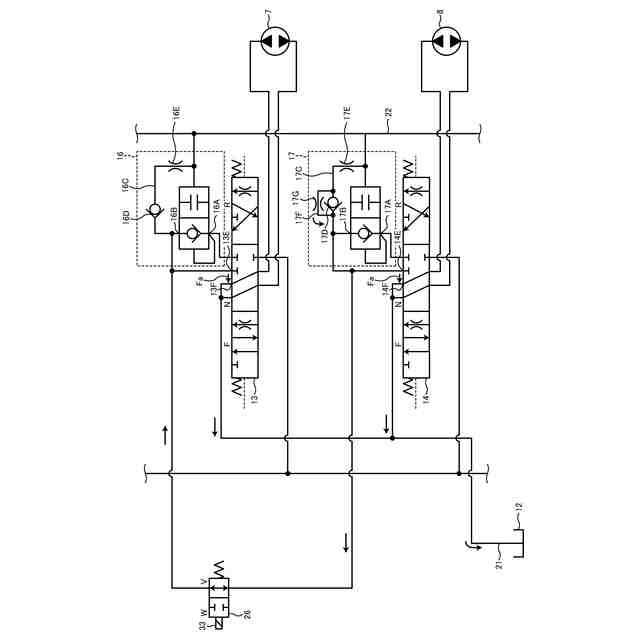
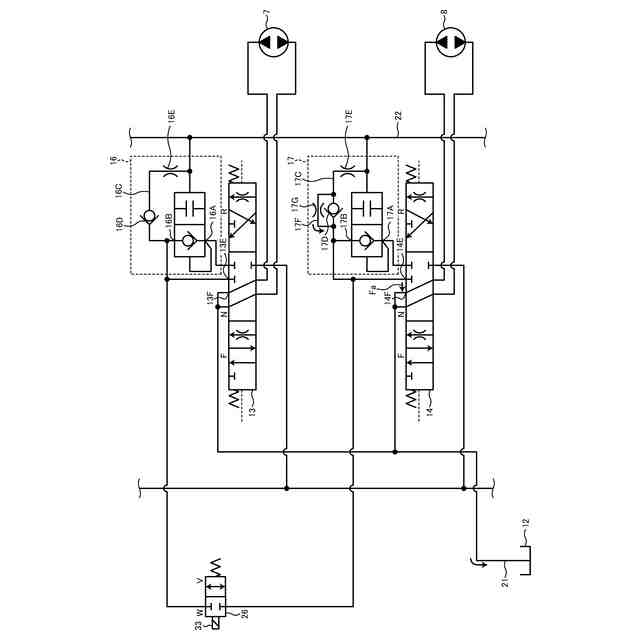
本開示に従えば、ポンプ吐出圧と信号流路を介して入力される負荷圧に応じたロードセンシング圧との差圧に基づいて作動油の吐出量を変化させる油圧ポンプと、油圧ポンプから供給される作動油により駆動する第1走行モータと、油圧ポンプから供給される作動油により駆動する第2走行モータと、油圧ポンプから供給される作動油により駆動する作業機シリンダと、油圧ポンプから第1走行モータに供給される作動油の流量及び方向を制御する第1走行操作弁と、油圧ポンプから第2走行モータに供給される作動油の流量及び方向を制御する第2走行操作弁と、油圧ポンプから作業機シリンダに供給される作動油の流量及び方向を制御する作業機操作弁と、第1導入流路を介して信号流路に接続され、ロードセンシング圧に基づいて第1走行操作弁の前後差圧を補償する第1圧力補償弁と、第2導入流路を介して信号流路に接続され、ロードセンシング圧に基づいて第2走行操作弁の前後差圧を補償する第2圧力補償弁と、第2導入流路の少なくとも一部をバイパスするバイパス流路と、第1走行操作弁と第2走行操作弁とを連結する連結流路に配置される走行連通弁と、作動油の温度を示す作動油温度を検出する温度センサと、第1走行操作弁及び第2走行操作弁のそれぞれが中立位置に配置されている状態で、温度センサの検出データに基づいて、走行連通弁のストロークを調整する制御装置と、を備える、作業機械が提供される。
【発明の効果】
【0007】
本開示によれば、作業機の操作性の悪化が抑制される。
【図面の簡単な説明】
【0008】
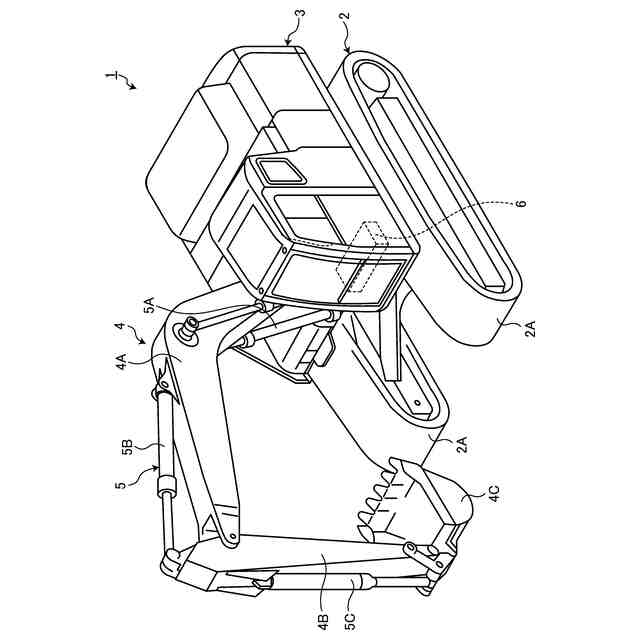
図1は、第1実施形態に係る作業機械を示す斜視図である。
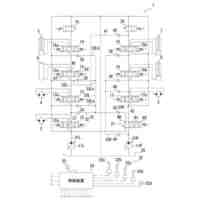
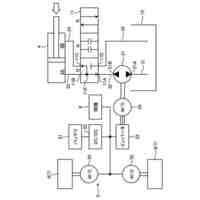
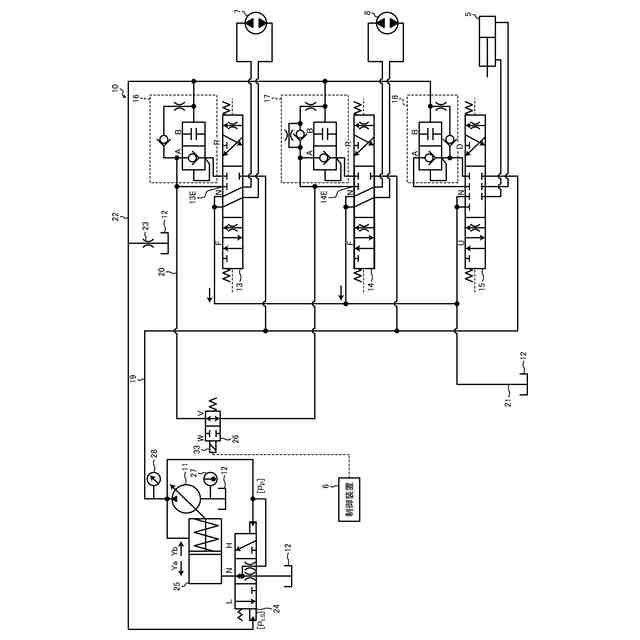
図2は、第1実施形態に係る作業機械の油圧システムを示す図である。
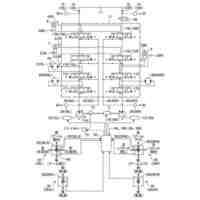
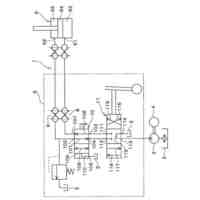
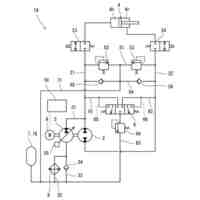
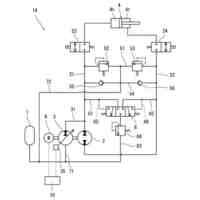
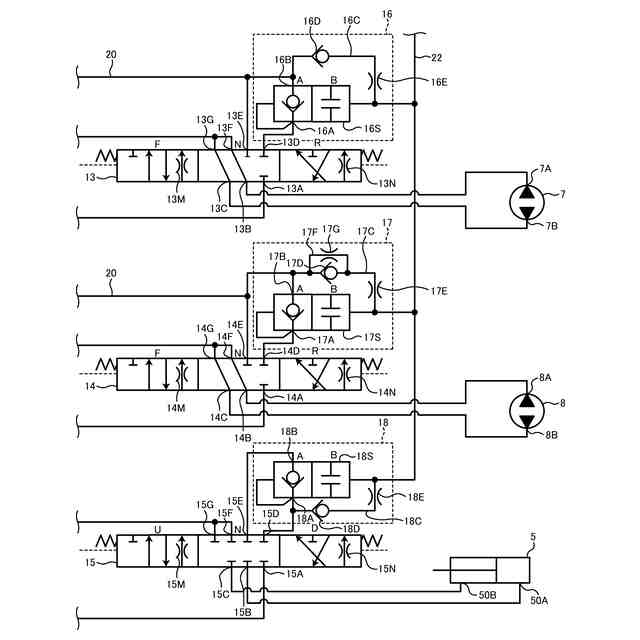
図3は、第1実施形態に係る油圧システムの一部を拡大した図である。
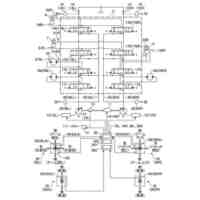
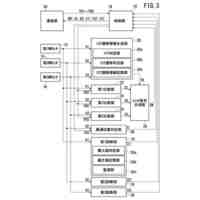
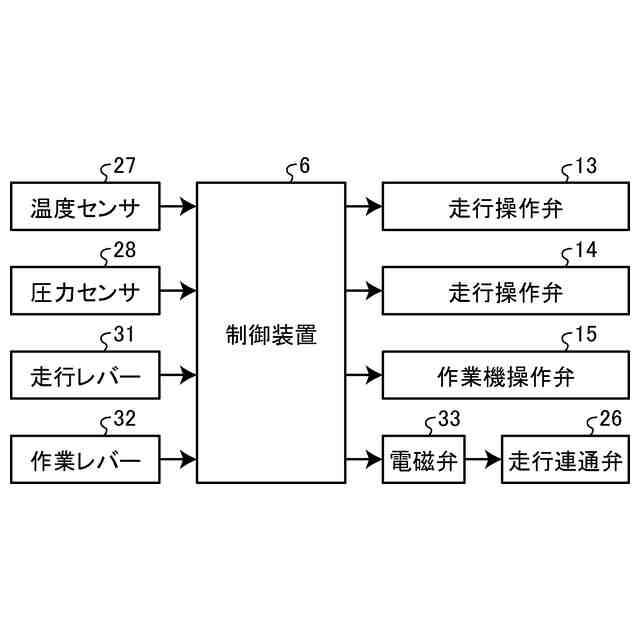
図4は、第1実施形態に係る油圧システムを模式的に示すブロック図である。
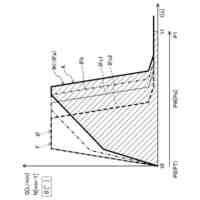
図5は、第1実施形態に係る負荷圧と差圧との関係を示す図である。
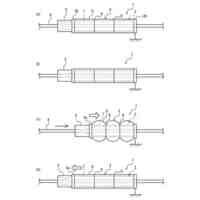
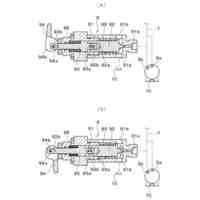
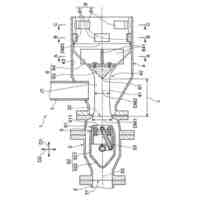
図6は、第1実施形態に係る走行連通弁の動作を示す図である。
図7は、第1実施形態に係る走行連通弁の動作を示す図である。
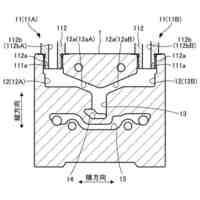
図8は、第1実施形態に係る走行連通弁を模式的に示す図である。
図9は、第1実施形態に係る走行連通弁のスプールを模式的に示す図である。
図10は、第1実施形態に係る走行連通弁の動作を模式的に示す図である。
図11は、第1実施形態に係る作動油温度と目標ストローク量と走行連通弁の開口面積との関係を示すテーブルデータを示す図である。
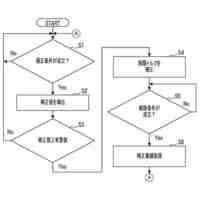
図12は、第1実施形態に係る油圧システムの制御方法を示すフローチャートである。
図13は、第2実施形態に係る油圧システムの制御方法を示すフローチャートである。
図14は、第3実施形態に係る油圧システムの制御方法を示すフローチャートである。
図15は、第3実施形態に係るポンプ吐出圧と目標ストローク量と走行連通弁の開口面積との関係を示すテーブルデータを示す図である。
【発明を実施するための形態】
【0009】
以下、本開示に係る実施形態について図面を参照しながら説明するが、本開示は実施形態に限定されない。以下で説明する実施形態の構成要素は適宜組み合わせることができる。また、一部の構成要素を用いない場合もある。
【0010】
[第1実施形態]
<作業機械>
第1実施形態について説明する。図1は、本実施形態に係る作業機械1を示す斜視図である。作業機械1は、作業現場において稼働する。本実施形態において、作業機械1は、油圧ショベルである。以下の説明において、作業機械1を適宜、油圧ショベル1、と称する。油圧ショベル1は、走行体2と、旋回体3と、作業機4と、作業機シリンダ5と、制御装置6とを備える。走行体2は、旋回体3を支持した状態で走行する。走行体2は、一対の履帯2Aを有する。履帯2Aは、走行モータにより回転する。履帯2Aの回転により、走行体2が走行する。旋回体3は、走行体2に支持される。旋回体3に運転室が設けられる。作業機4は、旋回体3に取り付けられる。作業機4は、ブーム4Aと、アーム4Bと、バケット4Cとを含む。作業機シリンダ5は、作業機4を動作させる。作業機シリンダ5は、油圧シリンダである。作業機シリンダ5は、ブームシリンダ5Aと、アームシリンダ5Bと、バケットシリンダ5Cとを含む。制御装置6は、コンピュータシステムを含む。制御装置6は、油圧ショベル1を制御する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
アズビル株式会社
ポジショナ
3か月前
株式会社不二越
油圧駆動装置
3か月前
旭精工株式会社
ピストン構造
6か月前
住友建機株式会社
ショベル
1日前
住友建機株式会社
ショベル
1日前
株式会社クボタ
作業車
3か月前
川崎重工業株式会社
液圧駆動システム
3か月前
ヤンマーホールディングス株式会社
作業機械
3か月前
国立大学法人東北大学
剛性可変索状体
25日前
SMC株式会社
シリンダ装置
4か月前
藤倉コンポジット株式会社
シリンダ装置
5か月前
個人
空圧式アクチュエータ
6か月前
三和テッキ株式会社
油圧シリンダ用油圧ユニット
3か月前
株式会社工営
シリンダー保護カバー
2か月前
ヤンセン・サイエンシズ・アイルランド・アンリミテッド・カンパニー
GDF15融合タンパク質及びその使用
5か月前
SMC株式会社
位置検出スイッチ
23日前
デンカ株式会社
アクチュエータ
4か月前
ナブテスコ株式会社
油圧回路
1日前
カヤバ株式会社
流体圧機器
3か月前
学校法人 中央大学
移動装置
5か月前
アズビル株式会社
パイロットリレー及びポジショナ
1か月前
住友重機械工業株式会社
駆動装置、駆動方法
5か月前
カヤバ株式会社
流体圧制御装置
6か月前
株式会社小松製作所
作業機械
4か月前
川崎重工業株式会社
液圧システム
6か月前
川崎重工業株式会社
液圧システム
6か月前
ダイキン工業株式会社
液圧ユニット
3か月前
ナブテスコ株式会社
制御弁及び建設機械
3か月前
株式会社クボタ
作業機及び作業機の制御方法
3か月前
カヤバ株式会社
インレットハウジング
3か月前
三和テッキ株式会社
油圧ポンプユニットの送り速度切替バルブ装置
3か月前
株式会社小松製作所
ダンプトラック
6か月前
パナソニックIPマネジメント株式会社
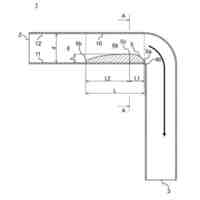
曲がり管
1か月前
学校法人 中央大学
流体圧アクチュエータ
2日前
コベルコ建機株式会社
建設機械制御方法、建設機械
1か月前
株式会社栗本鐵工所
減勢機能付きバルブ
3か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ