TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024144959
公報種別
公開特許公報(A)
公開日
2024-10-15
出願番号
2023057155
出願日
2023-03-31
発明の名称
締結装置、及び締結方法
出願人
本田技研工業株式会社
代理人
個人
,
個人
,
個人
,
個人
主分類
B23P
19/06 20060101AFI20241004BHJP(工作機械;他に分類されない金属加工)
要約
【課題】ボルトの締結処理にかかる時間を短縮する締結装置、締結方法を提供する。
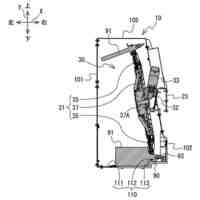
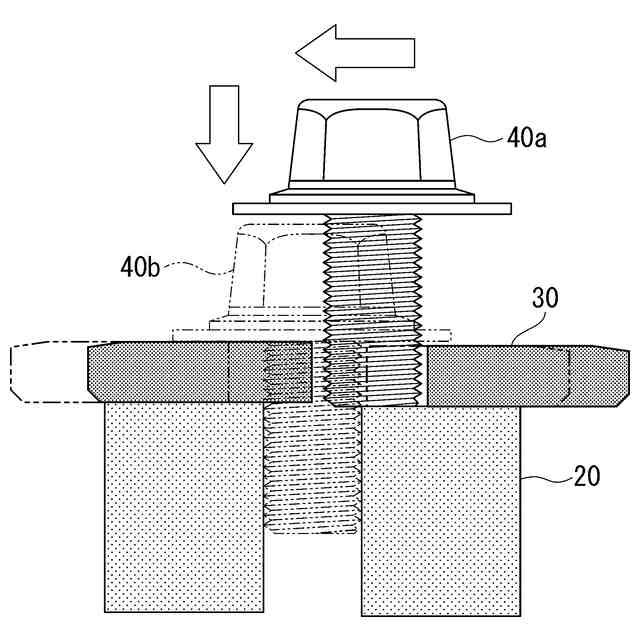
【解決手段】締結手段を締結することで、組付け部品を被組付け部品に組み付ける締結装置であって、第一締結穴を有する前記組付け部品が、第二締結穴を有する前記被組付け部品の上部に載置された状態で、少なくとも前記第一締結穴を含む領域を撮像する撮像手段と、撮像画像に基づいて、前記第一締結穴の第一位置、及び前記第二締結穴の第二位置を算出する制御手段とを備える。前記制御手段は、ロボットを制御して、前記第一位置に基づいて前記締結手段を前記第一締結穴に移動し挿入させるとともに、当該締結手段が前記第一締結穴に挿入された状態の前記組付け部品を前記第二位置の方向に移動させ、前記締結手段が前記第二締結穴へ挿入されたことの検出に応じて前記ロボットを制御して前記締結手段を締結させる。
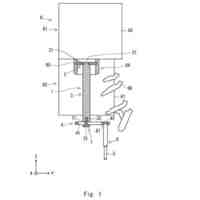
【選択図】図3
特許請求の範囲
【請求項1】
締結手段を締結することで、組付け部品を被組付け部品に組み付ける締結装置であって、
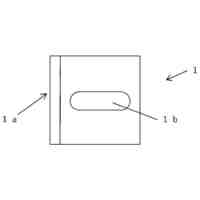
第一締結穴を有する前記組付け部品が、第二締結穴を有する前記被組付け部品の上部に載置された状態で、少なくとも前記第一締結穴を含む領域を撮像する撮像手段と、
撮像画像に基づいて、前記第一締結穴の第一位置、及び前記第二締結穴の第二位置を算出する制御手段と、
を備え、
前記制御手段は、ロボットを制御して、前記第一位置に基づいて前記締結手段を前記第一締結穴に移動し挿入させるとともに、当該締結手段が前記第一締結穴に挿入された状態の前記組付け部品を前記第二位置の方向に移動させ、前記締結手段が前記第二締結穴へ挿入されたことの検出に応じて前記ロボットを制御して前記締結手段を締結させる、
締結装置。
続きを表示(約 1,600 文字)
【請求項2】
前記制御手段は、前記撮像画像が前記第二締結穴の少なくとも一部の画像を含む場合、前記撮像画像の前記第二締結穴の画像に基づいて前記第二締結穴の前記第二位置を算出する、
請求項1に記載の締結装置。
【請求項3】
前記被組付け部品の輪郭から前記第二締結穴までの距離を示す距離情報を記憶する記憶手段を備え、
前記制御手段は、前記撮像画像が前記第二締結穴の少なくとも一部の画像を含んでいない場合、前記撮像画像における前記被組付け部品の前記輪郭の位置と、前記距離情報とに基づいて前記第二位置を算出する、
請求項1又は請求項2に記載の締結装置。
【請求項4】
前記締結手段にかかる力を計測する力覚センサをさらに備え、
前記制御手段は、前記締結手段が前記第一締結穴に挿入された状態の前記組付け部品を前記第二位置の方向に移動させる時に、前記力覚センサによるセンサ値が第一閾値を超える場合、前記移動を停止させる、
請求項1又は請求項2に記載の締結装置。
【請求項5】
前記締結手段にかかる力を計測する力覚センサ、前記締結手段の移動量を計測する変位センサの少なくともいずれかのセンサを備え、
前記制御手段は、前記センサによるセンサ値又は前記センサ値の変化量が第二閾値を超える場合に、前記締結手段が前記第二締結穴へ挿入されたことを検出する、
請求項1又は請求項2に記載の締結装置。
【請求項6】
前記制御手段は、前記締結手段が前記第一締結穴に挿入された状態の前記組付け部品を前記第二位置の方向に移動後に、前記締結手段が前記第二締結穴へ挿入されたことが検出されない場合、前記ロボットを制御して、前記締結手段が前記第一締結穴に挿入された状態の前記組付け部品を、移動方向を変更させながら往復動させる、
請求項1又は請求項2に記載の締結装置。
【請求項7】
前記制御手段は、算出した前記第一位置と前記第二位置との距離が所定値未満である場合に、前記第一位置に基づいて前記締結手段を前記第一締結穴に移動し挿入させるとともに、前記締結手段が前記第一締結穴に挿入された状態の前記組付け部品を前記第二位置の方向に移動させることなく前記締結手段を締結させる、
請求項1又は請求項2に記載の締結装置。
【請求項8】
前記組付け部品は、複数の前記第一締結穴を有し、
前記複数の第一締結穴のうち、一部の前記第一締結穴は、他の前記第一締結穴よりも後に締結処理が行われ、
前記制御手段は、前記他の第一締結穴の前記締結手段の締結状態を緩めた状態で、前記締結手段が前記一部の第一締結穴に挿入された状態の前記組付け部品を前記第二位置の方向に移動させる、
請求項1又は請求項2に記載の締結装置。
【請求項9】
締結手段を締結することで、組付け部品を被組付け部品に組み付ける締結方法であって、
第一締結穴を有する前記組付け部品が、第二締結穴を有する前記被組付け部品の上部に載置された状態で、少なくとも前記第一締結穴を含む領域を撮像する撮像工程と、
撮像画像に基づいて、前記第一締結穴の第一位置、及び前記第二締結穴の第二位置を算出する算出工程と、
ロボットを制御して、前記第一位置に基づいて前記締結手段を前記第一締結穴に移動し挿入させるとともに、当該締結手段が前記第一締結穴に挿入された状態の前記組付け部品を前記第二位置の方向に移動させる移動工程と、
前記締結手段が前記第二締結穴へ挿入されたことの検出に応じて前記ロボットを制御して前記締結手段を締結させる締結工程と、
を有する締結方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、締結装置、及び締結方法に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
電気自動車のバッテリパック等の製品の製造において、工程の自動化が求められている。自動化が求められる工程のひとつに、ボルトやネジなどの締結手段を、ワーク上の締結穴に挿入して締結するボルトの締結工程が挙げられる。
締結工程の自動化の例として、例えば、特許文献1がある。特許文献1では、締結部品の移動軌跡がスパイラル状軌道となるように座標を算出することで、締結穴の位置を広範囲において探索する処理を開示する。
【先行技術文献】
【特許文献】
【0003】
特開2012-20345号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1は、ネジが締結穴内に入っていない場合、ある地点を中心として外向きに広がるスパイラル状に締結穴を探索する締結装置を開示する。このように、スパイラル状に探索することにより、締結穴の探索に時間がかかるという課題がある。
【0005】
本発明は、このような事情を考慮してなされたものであり、ボルトの締結処理にかかる時間を短縮する締結装置、締結方法を提供することを目的の一つとする。
【課題を解決するための手段】
【0006】
この発明に係る締結装置、及び締結方法は、以下の構成を採用した。
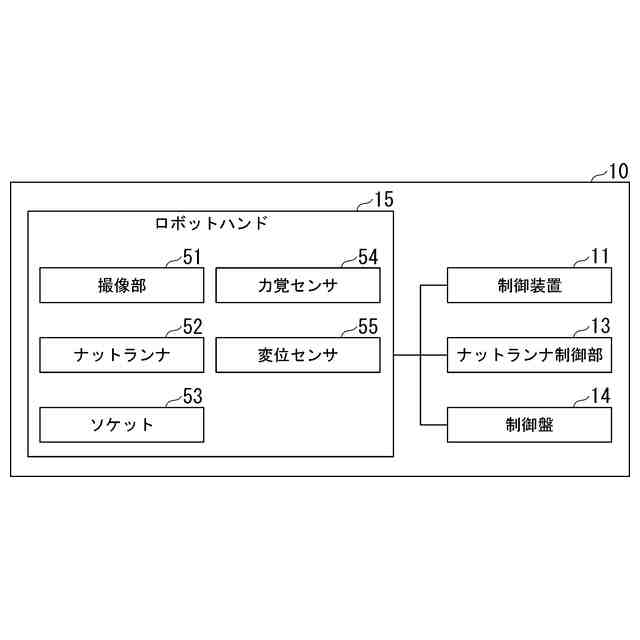
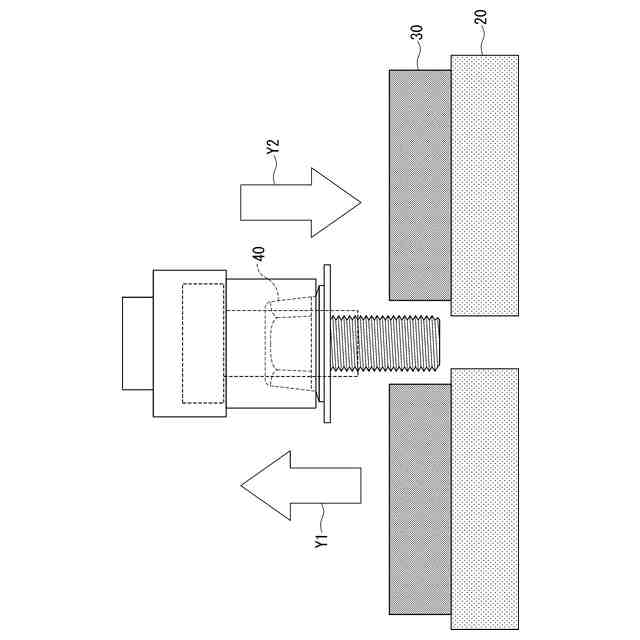
(1):この発明の一態様に係る締結装置は、締結手段を締結することで、組付け部品を被組付け部品に組み付ける締結装置である。締結装置は、撮像手段と、制御手段とを備える。撮像手段は、第一締結穴を有する前記組付け部品が、第二締結穴を有する前記被組付け部品の上部に載置された状態で、少なくとも前記第一締結穴を含む領域を撮像する。制御手段は、撮像画像に基づいて、前記第一締結穴の第一位置、及び前記第二締結穴の第二位置を算出する。前記制御手段は、ロボットを制御して、前記第一位置に基づいて前記締結手段を前記第一締結穴に移動し挿入させるとともに、当該締結手段が前記第一締結穴に挿入された状態の前記組付け部品を前記第二位置の方向に移動させ、前記締結手段が前記第二締結穴へ挿入されたことの検出に応じて前記ロボットを制御して前記締結手段を締結させる。
【0007】
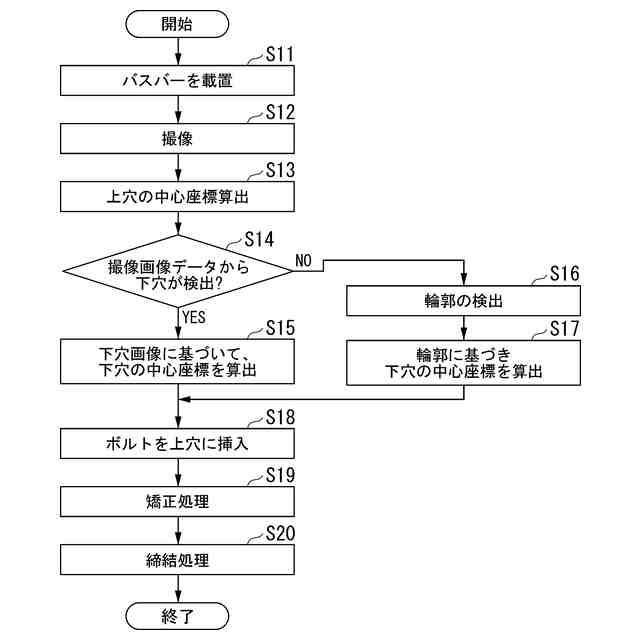
(2):上記(1)の態様において、前記制御手段は、前記撮像画像が前記第二締結穴の少なくとも一部の画像を含む場合、前記撮像画像の前記第二締結穴の画像に基づいて前記第二締結穴の前記第二位置を算出するものである。
【0008】
(3):上記(1)または(2)の態様において、締結手段は、前記被組付け部品の輪郭から前記第二締結穴までの距離を示す距離情報を記憶する記憶手段を備える。前記制御手段は、前記撮像画像が前記第二締結穴の少なくとも一部の画像を含んでいない場合、前記撮像画像における前記被組付け部品の前記輪郭の位置と、前記距離情報とに基づいて前記第二位置を算出するものである。
【0009】
(4):上記(1)~(3)のうちいずれかの一つの態様において、締結装置は、前記締結手段にかかる力を計測する力覚センサをさらに備える。前記制御手段は、前記締結手段が前記第一締結穴に挿入された状態の前記組付け部品を前記第二位置の方向に移動させる時に、前記力覚センサによるセンサ値が第一閾値を超える場合、前記移動を停止させるものである。
【0010】
(5):上記(1)~(4)のうちいずれかの一つの態様において、前記締結装置は、前記締結手段にかかる力を計測する力覚センサ、前記締結手段の移動量を計測する変位センサの少なくともいずれかのセンサを備える。前記制御手段は、前記センサによるセンサ値又は前記センサ値の変化量が第二閾値を超える場合に、前記締結手段が前記第二締結穴へ挿入されたことを検出するものである。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
面取り装置
1か月前
個人
コンタクトチップ
11日前
日東精工株式会社
ねじ締め機
21日前
日東精工株式会社
ねじ締め機
21日前
トヨタ自動車株式会社
治具
22日前
株式会社ダイヘン
スタッド溶接電源
13日前
有限会社ハラダ印刷
穿孔機用案内板
2か月前
福井県
マルチマテリアルの点接合構造
2か月前
津根精機株式会社
鉄筋切断装置
2か月前
株式会社FUJI
ワーク置き台
18日前
ブラザー工業株式会社
工作機械
1か月前
ブラザー工業株式会社
工作機械
1か月前
株式会社MOLDINO
ドリル
1か月前
株式会社ダイヘン
くびれ検出制御方法
2か月前
株式会社ダイヘン
インチング制御方法
5日前
ブラザー工業株式会社
工作機械
11日前
株式会社向洋技研
スポットネジ及び電極
2か月前
株式会社不二越
エンドミル
1か月前
旭精工株式会社
シャフトブレーキ
11日前
光精工株式会社
クーラントタンク
18日前
個人
交換式給油ブラシの切削油の給油器
2か月前
古川精機株式会社
タッピングガイド
15日前
株式会社進和
肉盛加工ノズル
2か月前
三和テッキ株式会社
レーザ付着物除去装置
13日前
株式会社ムラタ溶研
剪断装置
25日前
株式会社ダイヘン
アークスタート制御方法
5日前
株式会社ダイヘン
溶接電源装置
13日前
株式会社大林組
構造物形成方法
12日前
ブラザー工業株式会社
工作機械
1か月前
トヨタ自動車株式会社
レーザ加工方法
2か月前
株式会社東京精密
加工用排液濾過装置
13日前
株式会社アイシン
金属部材の接合方法
21日前
コントレイル合同会社
レーザ加工装置
1か月前
カヤバ株式会社
溶接方法及び溶接構造
18日前
トヨタ自動車株式会社
レーザ加工装置
12日前
トヨタ自動車株式会社
レーザ溶接方法
18日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ