TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024143790
公報種別
公開特許公報(A)
公開日
2024-10-11
出願番号
2023056670
出願日
2023-03-30
発明の名称
作業機械の制御装置
出願人
日立建機株式会社
代理人
弁理士法人サンネクスト国際特許事務所
主分類
E02F
9/22 20060101AFI20241003BHJP(水工;基礎;土砂の移送)
要約
【課題】作業機械において効率の良い作業を実現する。
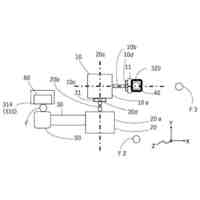
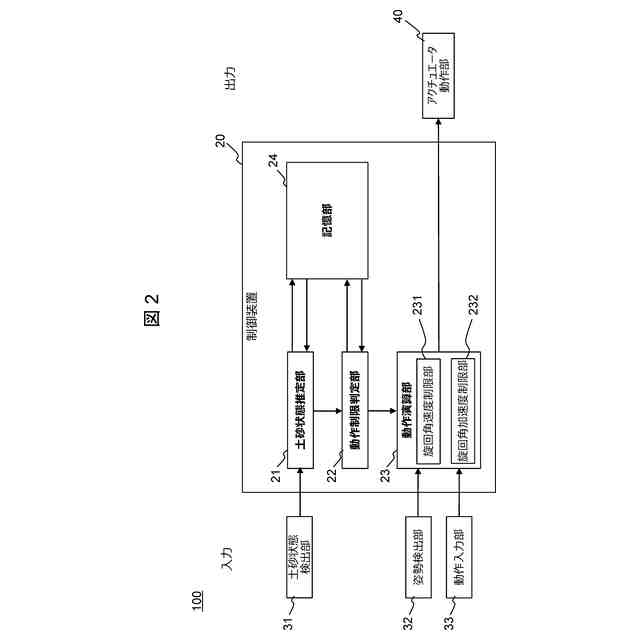
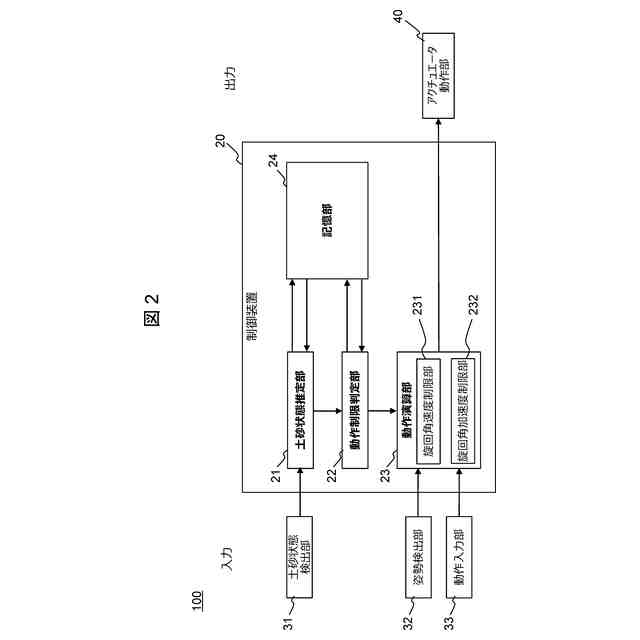
【解決手段】制御装置20は、油圧ショベルの作業装置が掘削する掘削対象物(土砂)の状態に関する状態情報を取得し、この状態情報に基づいて土砂の状態を推定する土砂状態推定部21と、土砂状態推定部21により推定された土砂の状態に基づいて、油圧ショベルの旋回時の角速度上限値および角加速度上限値をそれぞれ設定する動作制限判定部22と、油圧ショベルの姿勢に関する姿勢情報を取得し、この姿勢情報と、動作制限判定部22により設定された角速度上限値および角加速度上限値とに基づいて、油圧ショベルの旋回動作に対する動作指示を制限する動作演算部23と、を備える。
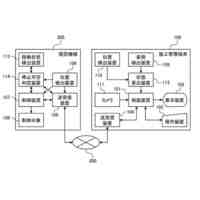
【選択図】図2
特許請求の範囲
【請求項1】
作業装置を備え、旋回動作を含む作業機械の動作を制御する作業機械の制御装置であって、
前記作業装置が掘削する掘削対象物の状態に関する状態情報を取得し、前記状態情報に基づいて前記掘削対象物の状態を推定する状態推定部と、
前記状態推定部により推定された前記掘削対象物の状態に基づいて、前記作業機械の旋回時の角速度上限値および角加速度上限値をそれぞれ設定する動作制限判定部と、
前記作業機械の姿勢に関する姿勢情報を取得し、前記姿勢情報と、前記動作制限判定部により設定された前記角速度上限値および前記角加速度上限値とに基づいて、前記作業機械の旋回動作に対する動作指示を制限する動作演算部と、を備えることを特徴とする作業機械の制御装置。
続きを表示(約 1,100 文字)
【請求項2】
請求項1に記載の作業機械の制御装置において、
前記角速度上限値および前記角加速度上限値に基づく速度ベクトルを所定の演算周期ごとに算出し、算出した前記速度ベクトルに基づいて前記作業機械が前記掘削対象物を運搬する際の経路を生成する経路生成部を備え、
前記動作演算部は、前記経路生成部により生成された前記経路に基づいて前記作業機械の動作量を演算することを特徴とする作業機械の制御装置。
【請求項3】
請求項2に記載の作業機械の制御装置において、
前記作業機械が前記掘削対象物を運搬しているときに前記作業機械の旋回半径が変化する場合、前記動作制限判定部は、前記演算周期ごとに前記角速度上限値および前記角加速度上限値をそれぞれ変更し、
前記経路生成部は、前記演算周期ごとに変更された前記角速度上限値および前記角加速度上限値に基づいて前記速度ベクトルを算出することを特徴とする作業機械の制御装置。
【請求項4】
請求項2に記載の作業機械の制御装置において、
前記経路生成部により生成された前記経路における前記作業機械の作業効率を演算する作業効率演算部を備え、
前記経路生成部は、前記掘削対象物の掘削量が互いに異なる複数の前記経路を生成し、
前記作業効率演算部は、複数の前記経路に対して前記作業効率をそれぞれ演算するとともに、複数の前記経路の中で前記作業効率が最も高い経路を選択し、
前記動作演算部は、前記作業効率演算部により選択された前記経路に基づいて、前記作業機械の動作量を演算することを特徴とする作業機械の制御装置。
【請求項5】
請求項4に記載の作業機械の制御装置において、
前記状態推定部は、前記掘削対象物の状態が所定の流動性以上を有する高流動性状態に該当するか否かを推定し、
前記状態推定部により前記掘削対象物の状態が前記高流動性状態に該当すると推定された場合、前記経路生成部は、前記掘削対象物の掘削量を所定値以下に制限して複数の前記経路を生成することを特徴とする作業機械の制御装置。
【請求項6】
請求項1に記載の作業機械の制御装置において、
前記状態推定部により推定された前記掘削対象物の状態に基づいて、前記作業機械が前記掘削対象物を掘削する際の掘削方法と、前記作業機械が前記掘削対象物を運搬した後に所定の放出場所へ放出する際の放出方法と、の少なくとも一方を決定する動作方法決定部を備えることを特徴とする作業機械の制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業機械の動作を制御する作業機械の制御装置に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
従来、土木建設業界において、バケットの荷こぼれを推定しオペレータへ通知するシステムが知られている。例えば特許文献1には、作業対象物の荷重値、作業機の姿勢、及び作業機の運動状態の相互関係で規定された荷こぼれ基準値が記憶された荷こぼれ基準記憶部と、作業機の運動状態を示す物理量に基づいて、作業機が作業対象物の運搬中に荷こぼれを発生したか否かを推定する荷こぼれ推定部を備え、荷こぼれ推定部で荷こぼれが発生したと判定された旨をモニタで報知する作業機械が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2019-157362号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1に記載の作業機械は、荷こぼれが発生したか否かを推定し、発生したと推定した場合に報知を行うものであり、運搬前に荷こぼれが発生しそうな動作を予測するものではないため、荷こぼれを事前に防止することはできない。したがって、例えば流動性の高い土砂を運搬する場合などのように荷こぼれが起きやすい状況では、作業機械のオペレータは荷こぼれを防ぐために作業機械の操作を慎重に行う必要があり、その結果、作業機械の動作速度が著しく制限されてしまって作業効率が低下するおそれがある。また、オペレータの習熟度が低い場合には、慎重に操作したにも関わらず荷こぼれを起こしてしまう可能性もある。このように、従来の作業機械では効率の良い作業の実現に関してさらなる改善の余地がある。
【0005】
本発明は、上記の点に鑑みてなされたものであり、その目的とするところは、作業機械において効率の良い作業を実現することにある。
【課題を解決するための手段】
【0006】
本発明による作業機械の制御装置は、作業装置を備え、旋回動作を含む作業機械の動作を制御する装置であって、前記作業装置が掘削する掘削対象物の状態に関する状態情報を取得し、前記状態情報に基づいて前記掘削対象物の状態を推定する状態推定部と、前記状態推定部により推定された前記掘削対象物の状態に基づいて、前記作業機械の旋回時の角速度上限値および角加速度上限値をそれぞれ設定する動作制限判定部と、前記作業機械の姿勢に関する姿勢情報を取得し、前記姿勢情報と、前記動作制限判定部により設定された前記角速度上限値および前記角加速度上限値とに基づいて、前記作業機械の旋回動作に対する動作指示を制限する動作演算部と、を備える。
【発明の効果】
【0007】
本発明によれば、作業機械において効率の良い作業を実現できる。
【0008】
なお、本発明に関連する更なる特徴は、本明細書の記述、添付図面から明らかになるものである。また、上記した以外の、課題、構成及び効果は、以下の実施形態の説明により明らかにされる。
【図面の簡単な説明】
【0009】
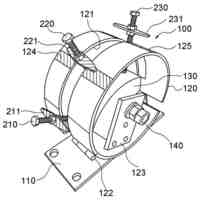
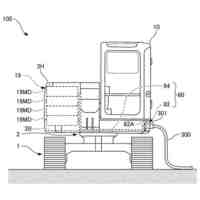
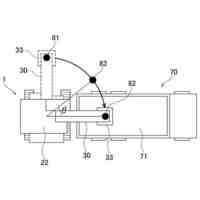
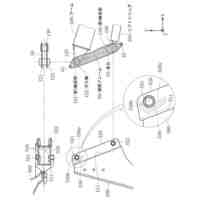
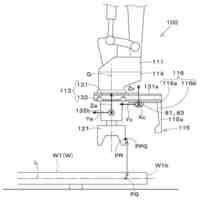
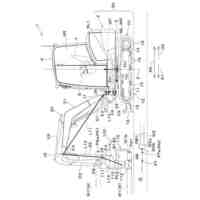
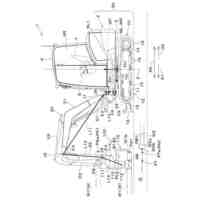
本発明の一実施形態に係る作業機械の一例である油圧ショベルの概略図。
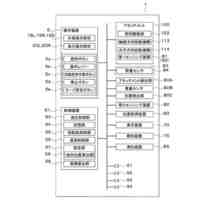
本発明の第1の実施形態に係る制御システムの機能ブロック図。
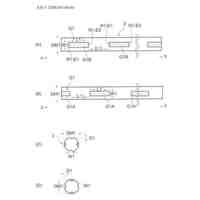
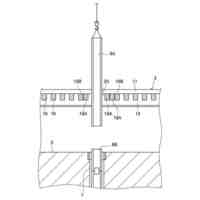
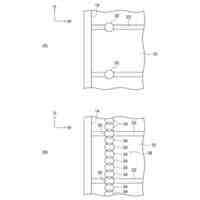
距離センサを土砂状態検出部として用いた場合の土砂状態の検出方法の説明図。
圧力センサを土砂状態検出部として用いた場合の土砂状態の検出方法の説明図。
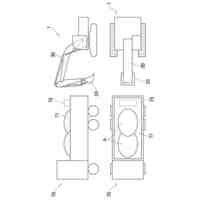
撮影装置を土砂状態検出部として用いた場合の土砂状態の検出方法の説明図。
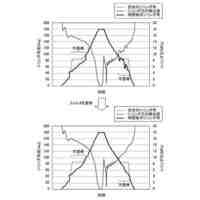
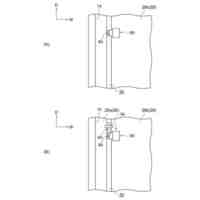
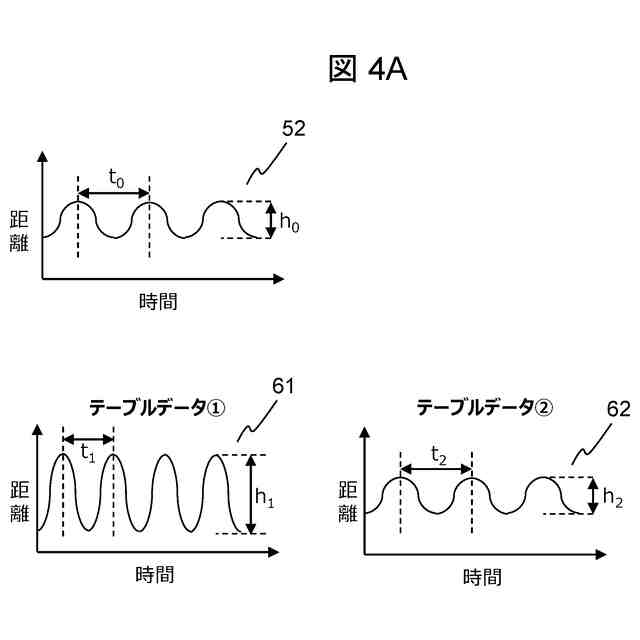
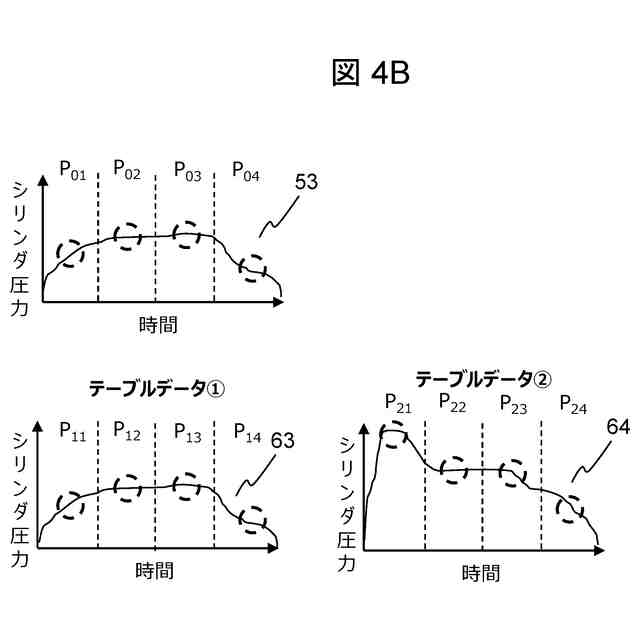
距離センサを土砂状態検出部に用いて得られた時系列データを参照情報と比較する場合の土砂状態の推定方法の説明図。
圧力センサを土砂状態検出部に用いて得られた時系列データを参照情報と比較する場合の土砂状態の推定方法の説明図。
撮影装置を土砂状態検出部に用いて得られた時系列データを参照情報と比較する場合の土砂状態の推定方法の説明図。
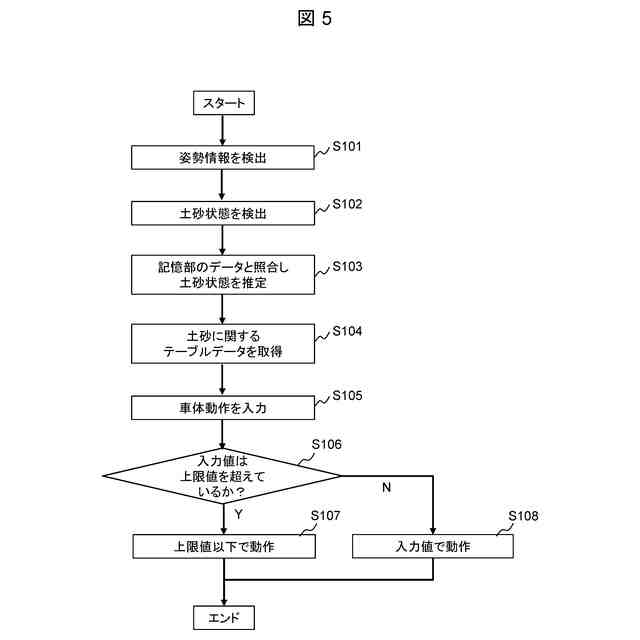
本発明の第1の実施形態に係る制御システムの処理の流れを示すフローチャート。
本発明の第2の実施形態に係る制御システムの機能ブロック図。
本発明の第2の実施形態に係る制御システムの処理の流れを示すフローチャート。
本発明の第3の実施形態に係る制御システムの機能ブロック図。
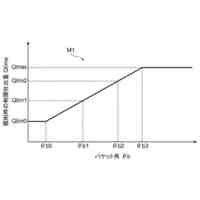
掘削経路生成部において設定される上限掘削量の一例を示す図。
本発明の第3の実施形態に係る制御システムの処理の流れを示すフローチャート。
本発明の第4の実施形態に係る制御システムの機能ブロック図。
掘削方法決定部において決定される掘削方法の一例を示す図。
放土方法決定部において決定される放土方法の一例を示す図。
本発明の第4の実施形態に係る制御システムの処理の流れを示すフローチャート。
【発明を実施するための形態】
【0010】
以下、本発明による作業機械および情報提示方法の実施例について、図面を参照しながら説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日立建機株式会社
作業車両
21日前
日立建機株式会社
作業機械の稼働現場管理システム
1か月前
日立建機株式会社
建設機械の動作制御システム
1か月前
個人
エア津波緩衝装置
1か月前
個人
指示装置
1か月前
株式会社クボタケミックス
桝蓋
1か月前
株式会社不二越
建設機械
1か月前
住友建機株式会社
ショベル
1か月前
住友建機株式会社
ショベル
27日前
コベルコ建機株式会社
作業機械
1か月前
住友重機械工業株式会社
作業機械
6日前
個人
鋼管杭とその製造方法
1か月前
住友重機械工業株式会社
作業機械
1か月前
鹿島建設株式会社
建込み方法
19日前
株式会社フジタ
建築物とその施工方法
1か月前
コベルコ建機株式会社
作業機械
1か月前
コベルコ建機株式会社
作業機械
1か月前
千代田工営株式会社
杭と上部構造物との接合構造
1か月前
ジーネットワーク株式会社
低空頭FRP.Tube合成杭
28日前
個人
アンカーボルト支持装置
28日前
住友重機械工業株式会社
作業機械の制御装置
1か月前
ヤンマーホールディングス株式会社
作業機械
1か月前
スーパーレジンクラフト株式会社
防塵板付消波装置
27日前
日立建機株式会社
作業車両
21日前
三陽機器株式会社
作業機の作業部連結構造
21日前
株式会社竹中工務店
山留め工法
1か月前
株式会社竹中工務店
山留め工法
1か月前
日特建設株式会社
基盤材処理システム
1か月前
ニシオホールディングス株式会社
作業機械用操作装置
1か月前
清水建設株式会社
道路に対する液状化対策構造
1か月前
小岩金網株式会社
布団篭の本体パネル及び布団篭
1か月前
株式会社クボタ
作業機および作業機の制御方法
5日前
株式会社クボタ
作業機および作業機の制御方法
5日前
株式会社クボタ
作業機および作業機の制御方法
5日前
株式会社クボタ
作業機および作業機の制御方法
5日前
株式会社クボタ
作業機および作業機の制御方法
5日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ