TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024143745
公報種別
公開特許公報(A)
公開日
2024-10-11
出願番号
2023056568
出願日
2023-03-30
発明の名称
ロボット
出願人
川崎重工業株式会社
代理人
個人
,
個人
主分類
H01L
21/677 20060101AFI20241003BHJP(基本的電気素子)
要約
【課題】ワークが壁部に干渉することを回避して、ワークの搬送を円滑に行うことが可能なロボットを提供する。
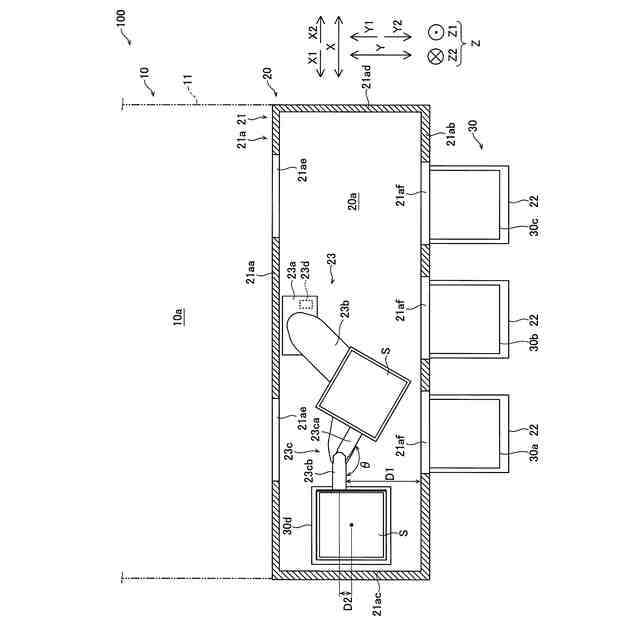
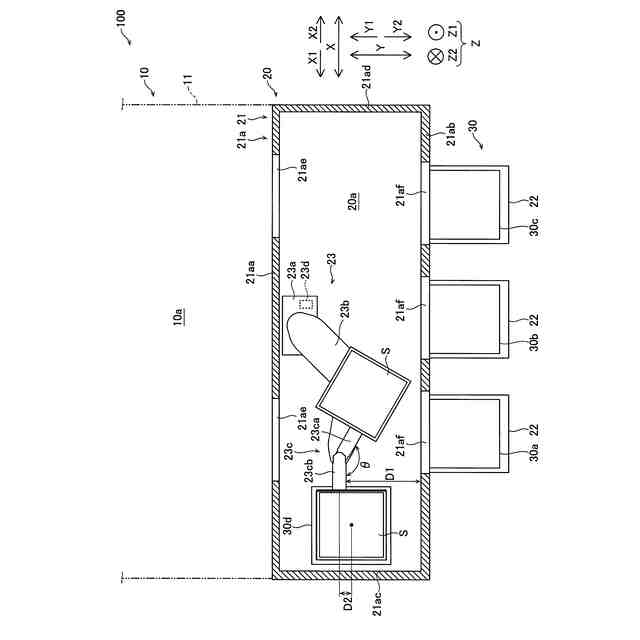
【解決手段】このロボット23は、水平多関節型のロボットアーム23bと、ロボットアーム23bの先端に配置されるとともに、矩形板状の基板Sを保持するハンド23cと、複数の載置部30の間で基板Sを搬送するように、ハンド23cおよびロボットアーム23bの動作を制御する制御部23dと、を備える。ハンド23cおよびロボットアーム23bは、壁部21aで囲まれた搬送空間20aに配置されており、制御部23dは、基板Sが壁部21aに干渉しないように、ハンド23cの中央から基板Sの端面までの距離が不均等な状態で基板Sを搬送するように、ハンド23cおよびロボットアーム23bの動作を制御する。
【選択図】図5
特許請求の範囲
【請求項1】
基台と、
前記基台に接続される水平多関節型のロボットアームと、
前記ロボットアームの先端に配置されるとともに、矩形板状のワークを保持するハンドと、
複数の載置部の間で前記ワークを搬送するように、前記ハンドおよび前記ロボットアームの動作を制御する制御部と、を備え、
前記ハンドおよび前記ロボットアームは、壁部で囲まれた搬送空間に配置されており、
前記制御部は、前記ワークが前記壁部に干渉しないように、前記ハンドの中央から前記ワークの端面までの距離が不均等な状態で前記ワークを搬送するように、前記ハンドおよび前記ロボットアームの動作を制御する、ロボット。
続きを表示(約 1,300 文字)
【請求項2】
前記ハンドは、第1ハンドと、前記第1ハンドの上方に配置され、前記第1ハンドとは別個に動作する第2ハンドとを含み、
前記制御部は、前記第1ハンドおよび前記第2ハンドの一方としての進入ハンドが前記載置部に進入する場合、前記第1ハンドおよび前記第2ハンドの他方としての逃げハンドが前記載置部から逃げるように、前記ハンドの動作を制御し、
前記制御部は、前記逃げハンドが保持する前記ワークが前記壁部に干渉しないように、前記進入ハンドの中央に対して前記逃げハンドが前記載置部から逃げる方向側に所定の距離だけ前記ワークをずらすことにより前記ハンドの中央から前記ワークの端面までの距離が不均等な状態で前記ワークを搬送するように、前記ハンドおよび前記ロボットアームの動作を制御する、請求項1に記載のロボット。
【請求項3】
前記ロボットアームは、複数のリンクと、複数の関節とを含み、
前記複数の関節の各々は、モータと、ギアを含む減速機とを有する、請求項1に記載のロボット。
【請求項4】
前記複数のリンクは、前記基台に接続される第1リンクと、前記第1リンクに接続されるとともに前記ハンドに接続される第2リンクとを有し、
前記複数の関節は、前記第1リンクを駆動する第1関節と、前記第2リンクを駆動する第2関節と、前記ハンドを駆動する第3関節とを有し、
前記第1関節および前記第2関節の各々の前記モータおよび前記減速機は、前記第1リンク内に配置されており、
前記第3関節の前記モータおよび前記減速機は、前記第2リンク内に配置されている、請求項3に記載のロボット。
【請求項5】
前記第1関節の前記モータは、前記第1リンク内において前記第1リンクが延びる方向に沿った姿勢で基端側を向いて配置されており、
前記第2関節の前記モータは、前記第1リンク内において前記第1リンクが延びる方向に沿った姿勢で先端側を向いて配置されており、
前記第3関節の前記モータは、前記第2リンク内において前記第2リンクが延びる方向に沿った姿勢で先端側を向いて配置されている、請求項4に記載のロボット。
【請求項6】
前記ロボットアームは、複数のリンクを含み、
前記複数のリンクは、前記基台に接続される第1リンクと、前記第1リンクに接続されるとともに前記ハンドに接続される第2リンクとを有し、
前記第1リンクおよび前記第2リンクの各々は、前記ハンドが前記壁部に干渉しないように、互いに異なる軸間距離を有する、請求項1に記載のロボット。
【請求項7】
前記第2リンクは、前記ハンドが前記壁部に干渉しないように、前記第1リンクよりも大きい軸間距離を有する、請求項6に記載のロボット。
【請求項8】
前記基台は、前記搬送空間の中心線からずれた位置に配置されている、請求項1に記載のロボット。
【請求項9】
前記ハンドは、第1ハンドと、前記第1ハンドの上方に配置され、前記第1ハンドとは別個に動作する第2ハンドとを含む、請求項1に記載のロボット。
発明の詳細な説明
【技術分野】
【0001】
この開示は、ロボットに関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
従来、ロボットアームを備えるロボットが知られている。特許文献1には、ガラス基板を搬送する基板搬送ロボットが開示されている。この基板搬送ロボットは、ハンドが先端に設けられる伸縮アーム部と、伸縮アーム部を走行軸に沿って走行させる走行台車とを備えている。この基板搬送ロボットは、伸縮アーム部の伸縮動作、および、走行台車の走行軸動作などの各種の動作を行うことにより、ガラス基板をカセットから所定の搬送箇所に搬送する。
【先行技術文献】
【特許文献】
【0003】
特開2014-103156号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記特許文献1に記載されたような基板搬送ロボットでは、ロボットアームおよびハンドが壁部に囲まれた空間に配置されている場合がある。この場合、ロボットアームおよびハンドによるガラス基板の搬送中に、ガラス基板が壁部に干渉すると、ガラス基板の搬送を円滑に行うことができないという問題点がある。
【0005】
この開示は、上記のような課題を解決するためになされたものであり、この開示の1つの目的は、ワークが壁部に干渉することを回避して、ワークの搬送を円滑に行うことが可能なロボットを提供することである。
【課題を解決するための手段】
【0006】
この開示の一の局面によるロボットは、基台と、基台に接続される水平多関節型のロボットアームと、ロボットアームの先端に配置されるとともに、矩形板状のワークを保持するハンドと、複数の載置部の間でワークを搬送するように、ハンドおよびロボットアームの動作を制御する制御部と、を備え、ハンドおよびロボットアームは、壁部で囲まれた搬送空間に配置されており、制御部は、ワークが壁部に干渉しないように、ハンドの中央からワークの端面までの距離が不均等な状態でワークを搬送するように、ハンドおよびロボットアームの動作を制御する。
【0007】
この開示の一の局面によるロボットでは、上記のように、制御部は、ワークが壁部に干渉しないように、ハンドの中央からワークの端面までの距離が不均等な状態でワークを搬送するように、ハンドおよびロボットアームの動作を制御する。これにより、ハンドの中央にワークを配置した状態でワークを搬送するとワークが壁部に干渉する場合にも、ハンドの中央からワークの端面までの距離が不均等な状態でワークを搬送することにより、ワークが壁部に干渉することを回避することができる。その結果、ワークの搬送を円滑に行うことができる。
【発明の効果】
【0008】
本開示によれば、ワークが壁部に干渉することを回避して、ワークの搬送を円滑に行うことができる。
【図面の簡単な説明】
【0009】
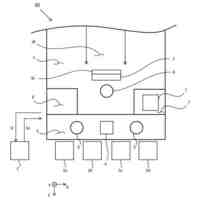
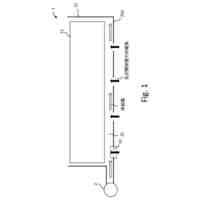
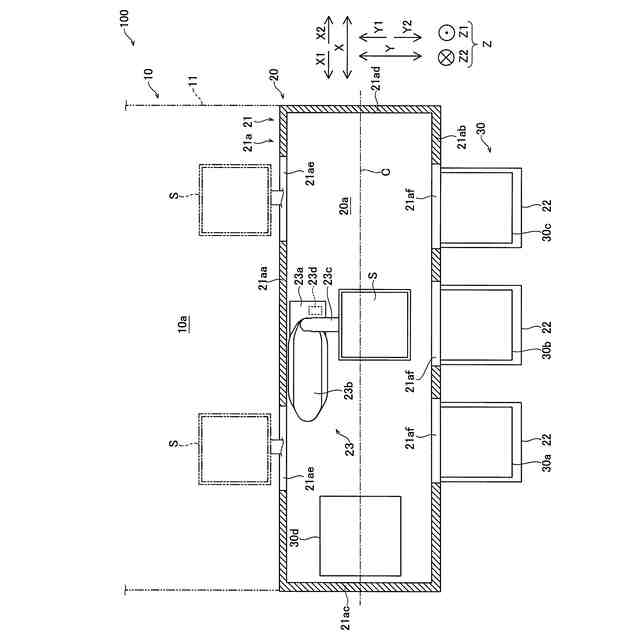
一実施形態による基板処理システムの構成を示す模式図である。
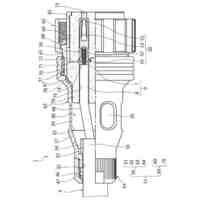
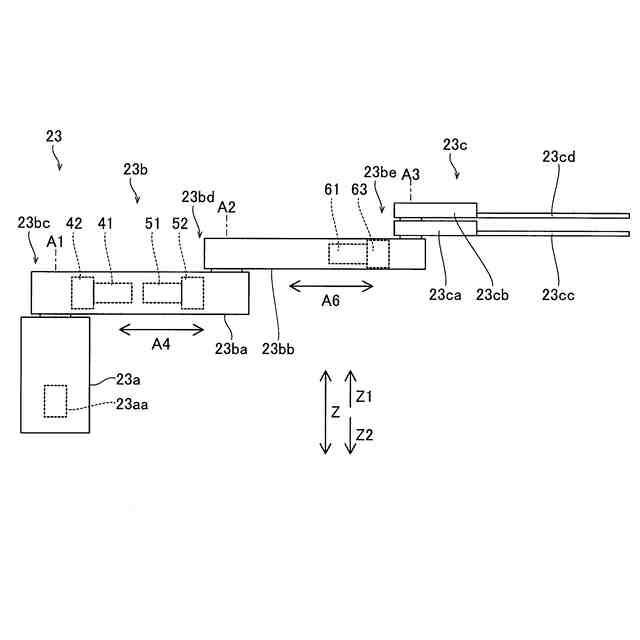
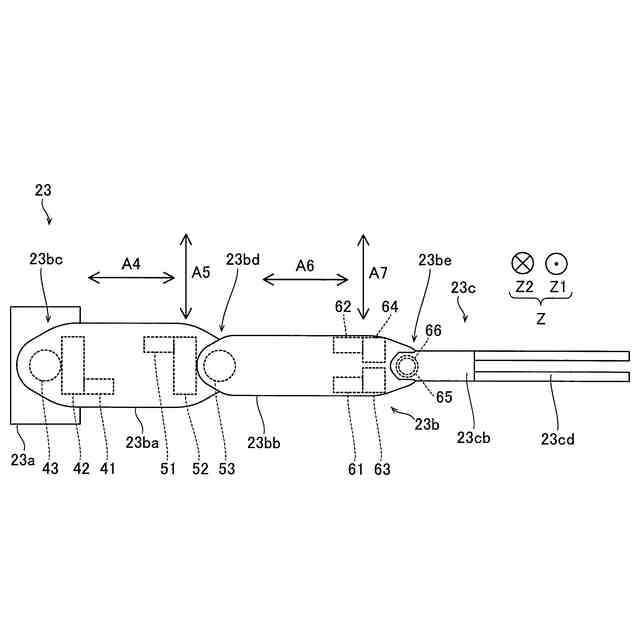
一実施形態によるロボットを示す模式的な側面図である。
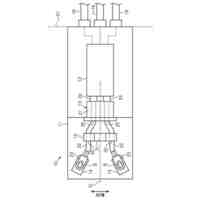
一実施形態によるロボットを示す模式的な平面図である。
ハンドの中央に基板を配置した状態で基板を搬送する例を説明するための模式図である。
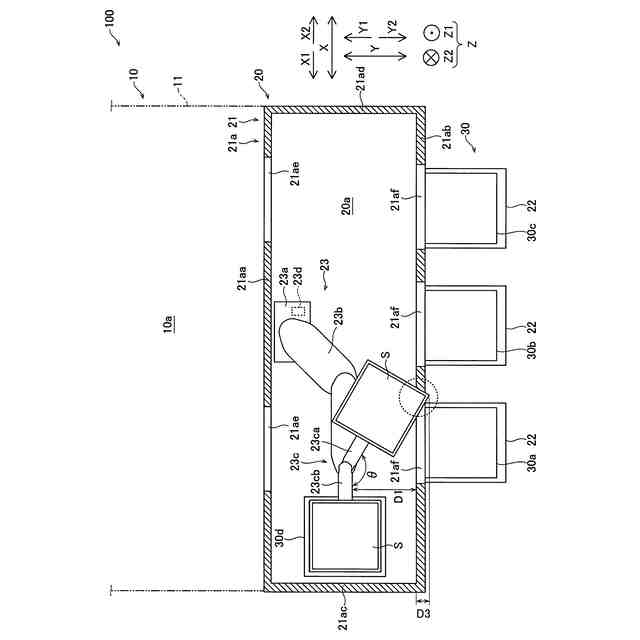
一実施形態によるロボットの基板の搬送を説明するための模式図である。
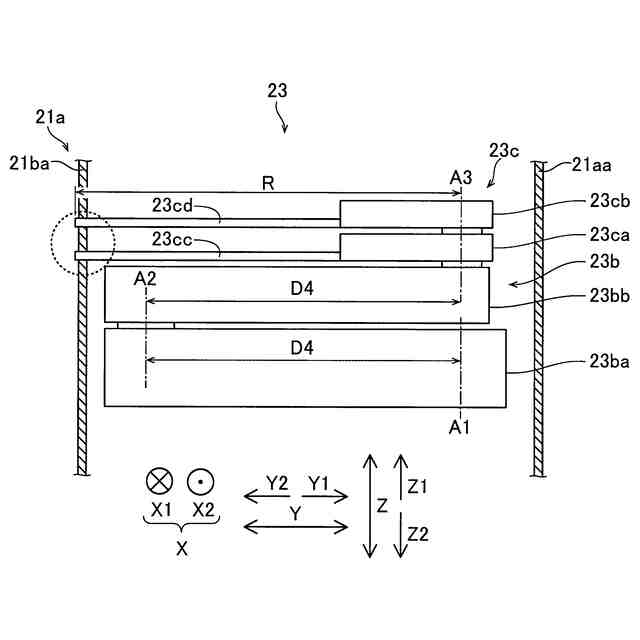
アームの軸間距離が等しい例を説明するための模式図である。
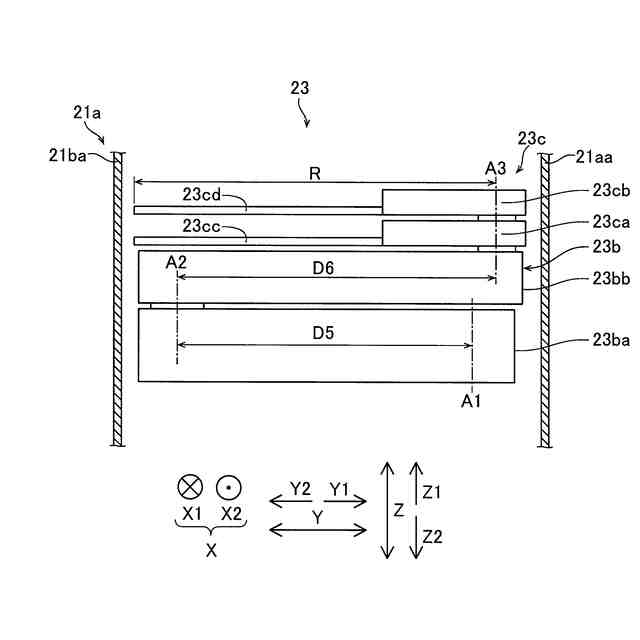
一実施形態によるアームの軸間距離を説明するための模式図である。
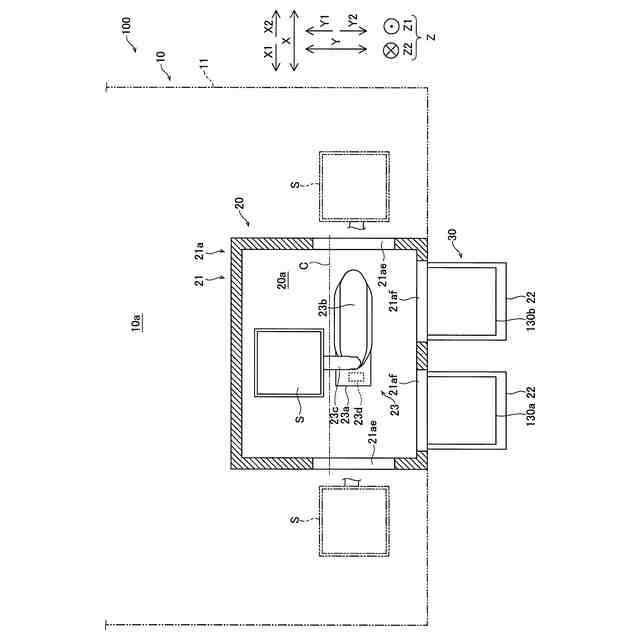
一実施形態の変形例による基板処理システムの構成を示す模式図である。
【発明を実施するための形態】
【0010】
以下、本開示を具体化した本開示の実施形態を図面に基づいて説明する。なお、本願明細書において、上下方向をZ方向と呼ぶ。上方側をZ1側と呼び、下方側をZ2側と呼ぶ。Z方向に直交する方向をX方向と呼ぶ。X方向の一方側をX1側と呼び、他方側をX2側と呼ぶ。Z方向およびX方向に直交する方向をY方向と呼ぶ。Y方向の一方側をY1側と呼び、他方側をY2側と呼ぶ。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
電波吸収体
17日前
東レ株式会社
二次電池
8日前
個人
タワー式増設端子台
1か月前
愛知電機株式会社
変圧器
15日前
電建株式会社
端子金具
22日前
SMK株式会社
コネクタ
22日前
太陽誘電株式会社
全固体電池
17日前
株式会社カネカ
接着加工装置
17日前
株式会社カネカ
接着加工装置
17日前
三菱電機株式会社
回路遮断器
22日前
三菱電機株式会社
端子カバー
8日前
株式会社水素パワー
接続構造
17日前
富士電機株式会社
半導体装置
22日前
桑野工業株式会社
同軸プラグ
1か月前
株式会社村田製作所
コイル部品
15日前
日機装株式会社
半導体発光装置
15日前
トヨタ自動車株式会社
二次電池
22日前
TDK株式会社
電子部品
29日前
個人
電波散乱方向制御板
8日前
日本特殊陶業株式会社
保持装置
22日前
トヨタ自動車株式会社
電池パック
29日前
ソニーグループ株式会社
発光素子
1か月前
日本航空電子工業株式会社
接続器
29日前
ローム株式会社
半導体装置
29日前
ローム株式会社
半導体装置
29日前
ローム株式会社
半導体装置
29日前
日新イオン機器株式会社
イオン注入装置
10日前
日本電気株式会社
波長可変レーザ
21日前
三洋化成工業株式会社
高分子固体電解質
17日前
株式会社ダイヘン
搬送装置
22日前
三菱製紙株式会社
熱暴走抑制耐火シート
16日前
株式会社島津製作所
X線撮影装置
22日前
トヨタ自動車株式会社
セルケース
22日前
株式会社三桂製作所
耐火コネクタ
28日前
住友電装株式会社
コネクタ
8日前
ローム株式会社
半導体装置
29日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ