TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024142899
公報種別
公開特許公報(A)
公開日
2024-10-11
出願番号
2023055289
出願日
2023-03-30
発明の名称
X線検査システムおよびそのキャリブレーション方法
出願人
アンリツ株式会社
代理人
弁理士法人有我国際特許事務所
主分類
B07C
5/36 20060101AFI20241003BHJP(固体相互の分離;仕分け)
要約
【課題】搬送される作業対象物に対してロボットの手先を的確に追従させ得るX線検査システムおよびそのキャリブレーション方法を提供する。
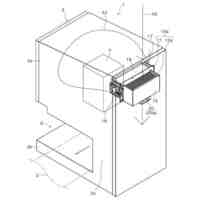
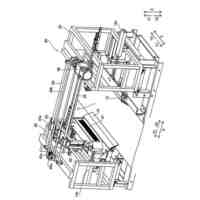
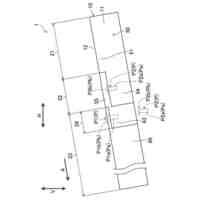
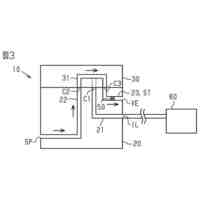
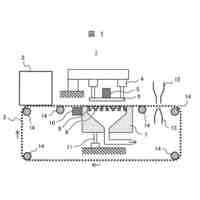
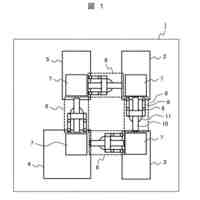
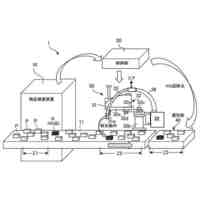
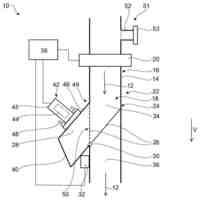
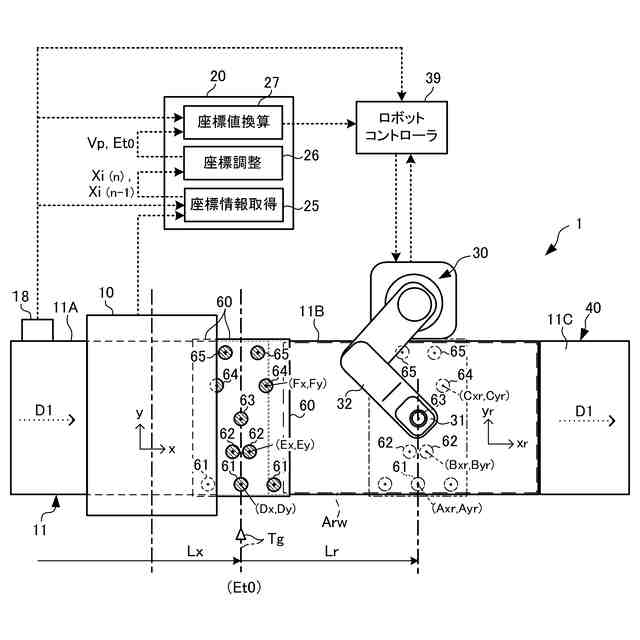
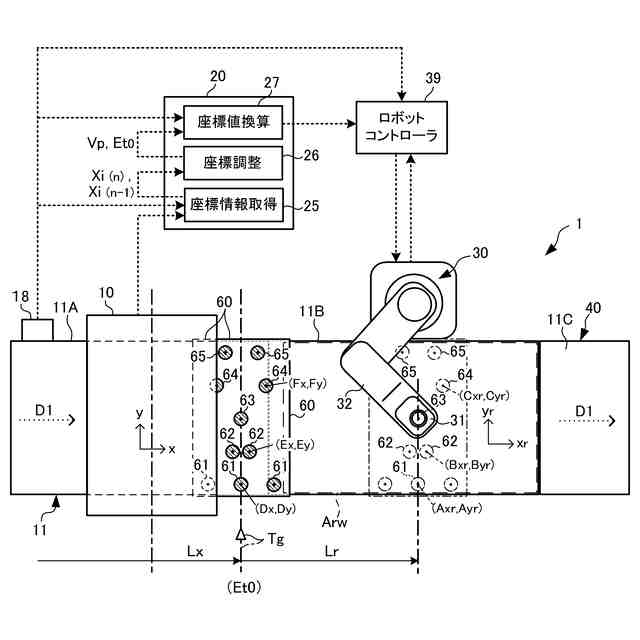
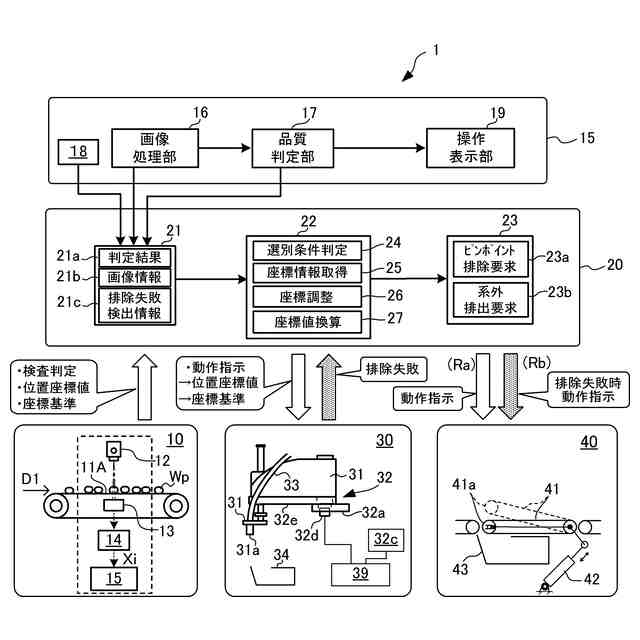
【解決手段】X線検査装置10と、トリガ信号を受け所定の稼働領域Arw内で所定の作業を実行するロボット30と、X線検査装置10およびロボット30と通信可能に接続された制御装置20とを備えたX線検査システムであり、逐次X線画像Xiに所定の検査結果とされた特定領域があるとき、少なくともその領域の領域位置情報を含む検査情報を制御装置20に通信出力し、制御装置20からロボット30に対して所定の作業実行位置情報をトリガ信号として通信出力させ、少なくともトリガ信号出力から作業対象の被検査物が稼働領域Arw内の所定作業位置に達するまでの間に、その搬送移動量に応じた信号をロボット30に対して出力させ、ロボット30が所定作業位置を教示された後に所定の作業を実行するように構成される。
【選択図】図1
特許請求の範囲
【請求項1】
所定の搬送条件で動作する搬送手段により搬送される被検査物(Wp)にX線を照射し、検出したX線透過データを処理して得られるX線画像に基づいて前記被検査物を検査するX線検査装置(10)と、
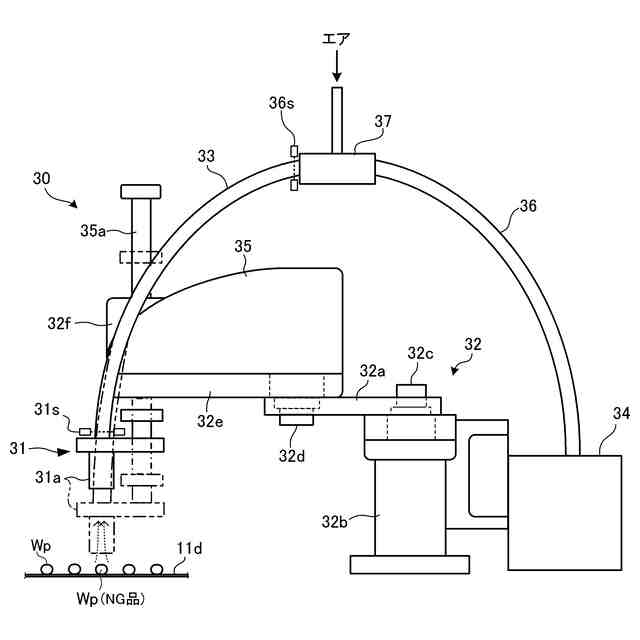
トリガ信号を受け、該トリガ信号に含まれる情報に基づいて所定の稼働領域(Arw)内で前記被検査物に対し所定の作業を実行するロボット(30)と、
前記X線検査装置および前記ロボットと通信可能に接続された制御装置(20)と、
を備えたX線検査システムであって、
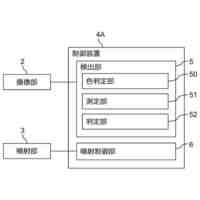
前記X線検査装置は、所定周期で、該周期内に検出した前記X線透過データを処理して逐次X線画像(Xi)を生成し、該逐次X線画像に所定の検査結果とされた特定領域があるとき、少なくとも該特定領域の位置を示す領域位置情報を含む検査情報を前記制御装置に対して通信出力できるようになっており、
前記制御装置は、
前記検査情報に基づき、前記ロボットに対して前記所定の作業を実行すべき位置を示す情報を含む作業位置情報を前記トリガ信号として通信出力する位置情報出力手段(25、26)と、
少なくとも前記トリガ信号を出力してから、前記ロボットが前記所定の作業を実行すべき被検査物が前記稼働領域内の所定の作業位置に達するまでの間において、該被検査物が前記搬送手段により搬送されて移動した搬送移動量に応じて搬送信号を前記ロボットに対して出力する搬送信号出力手段と
を有し、
前記ロボットは、前記領域位置情報に対応する前記所定の作業位置を教示された後、前記所定の作業を実行する、ことを特徴とするX線検査システム。
続きを表示(約 1,200 文字)
【請求項2】
前記位置情報出力手段は、前記X線検査装置から通信出力される前記検査情報のうち、前記所定の検査結果を含む前記検査情報を受信したとき前記トリガ信号を通信出力し、該所定の検査結果を含まない前記検査情報を受信したとき前記トリガ信号を通信出力しないことを特徴とする請求項1に記載のX線検査システム。
【請求項3】
前記位置情報出力手段は、前記所定の検査結果を含む前記検査情報を受信する毎に、前記トリガ信号を通信出力することを特徴とする請求項2に記載のX線検査システム。
【請求項4】
前記位置情報出力手段は、前記所定の検査結果を含む前記検査情報を順次記憶し、所定のタイミングで該検査情報を読み出して通信出力することを特徴とする請求項2に記載のX線検査システム。
【請求項5】
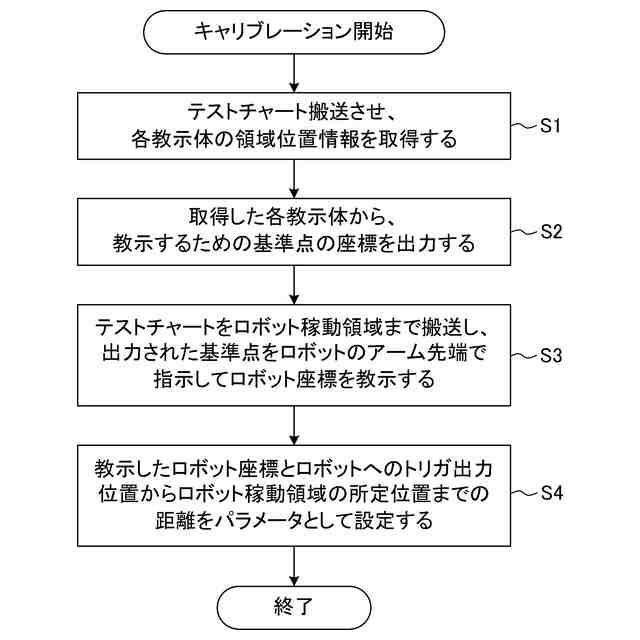
前記制御装置は、前記領域位置情報と前記所定の作業位置との対応関係を前記ロボットに教示するための教示モードを実行可能とされ、前記ロボットは、前記対応関係を記憶可能とされていることを特徴とする請求項1に記載のX線検査システム。
【請求項6】
前記制御装置は、前記教示モードにおいて、
前記X線検査装置から前記検査情報を受けたとき、第1停止位置で前記被検査物の搬送を停止させ、前記ロボットに前記トリガ信号を通信出力したとき該被検査物の搬送を再開させ、該被検査物が前記ロボットの前記稼働領域に含まれる第2停止位置で該被検査物の搬送を再度停止させてから、前記ロボットに前記対応関係を教示させる、ことを特徴とする請求項5に記載のX線検査システム。
【請求項7】
前記制御装置は、所定の操作入力を受けるごとに前記搬送手段を所定時間だけ寸動させ、前記操作入力を複数受けることによって、前記被検査物を前記第1停止位置から前記第2停止位置まで搬送させることを特徴とする請求項6に記載のX線検査システム。
【請求項8】
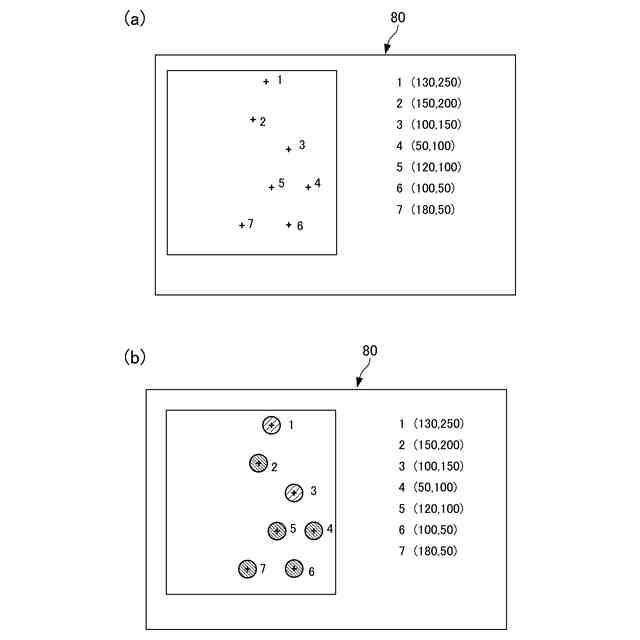
前記制御装置は、前記被検査物が第2停止位置に停止しているとき、前記領域位置情報に基づく座標データを判読可能に表示する表示手段(19)を、さらに有することを特徴とする請求項6または7に記載のX線検査システム。
【請求項9】
前記制御装置は、前記座標データの位置を表す記号を、二次元座標において該座標データに直接的または間接的に対応させて前記表示手段に表示することを特徴とする請求項8に記載のX線検査システム。
【請求項10】
前記制御装置は、前記ロボットに前記対応関係を教示するために前記座標データの入力を受け付ける座標設定手段をさらに有し、該座標設定された座標データを該ロボットに通信出力することを特徴とする請求項8または9に記載のX線検査システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、X線検査システムおよびそのキャリブレーション方法に関し、特に、コンベア搬送中の物品を順次X線検査するX線検査装置とその検査結果に応じて物品搬送に追従しつつ所定の作業を行うロボットとを備えたX線検査システム、および、そのキャリブレーション方法に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
搬送物品を順次検査するX線検査システムにおいて、不良となった物品を選別機等で搬送路外に排除する場合、搬送中の物品を物品検知センサで検知し、その検知信号をトリガとしてワークの排除タイミングが設定されるものが多い。
【0003】
しかし、比較的小サイズの複数の物品を整列させることなく散らばせた状態で搬送(以下、バラ状搬送ともいう)する場合、物品検知によって不良物品を確定することが容易でないため、搬送路上の所定エリア単位で物品検査を実行し、その検査エリアに対応する一定搬送距離毎に、不良品の有無に応じて被検査物品を搬送路上から選択的に系外に排除するものが知られていたが、不良品の排除時に良品の一部まで系外排出するため、製品歩留まりが悪いという問題があった。
【0004】
そこで、近時、ロボットを用いて物品搬送に追従しつつ不良品を排除可能にするコンベアトラッキングシステムが多用されてきており、特に視覚センサとして工業用のテレビカメラを用いるビジョントラッキングシステムがピンポイントでの排除に有効である。
【0005】
このようなトラッキングシステムでは、カメラ画像から撮像対象物の位置や姿勢等を正確に把握可能にするために個々のカメラのキャリブレーション(校正)に加え、ビジョントラッキングのためにカメラおよびその画像処理装置から得られるカメラ画像の座標値をロボット座標系の座標値に変換するためのキャリブレーションが実行される。
【0006】
すなわち、カメラ付きロボットでのコンベアトラッキングが採用される場合、搬送方向への座標追従のために、キャリブレーションと呼ばれる調整を実施することで、撮像信号(例えば原点信号)となるカメラの視野画像の座標値を、ロボット座標系の座標値に変換してロボットに入力させるとともに、搬送方向の移動についてエンコーダーで同期をとることにより、連動動作可能にしている。
【0007】
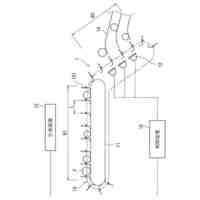
この種のビジョントラッキングのためのキャリブレーション方法としては、例えば、ロボットアームの先端が視野内に入る第1のカメラと、コンベア上の所定搬送区間内のワークは視野内に入るもののロボットアームの先端が視野内に入らない第2、第3のカメラと、隣り合う間隔が大小に異なる3つの穴(ここでは、便宜的に穴h1、h2、h3という)を有するキャリブレーション用ワークとを備え、穴h1、h2が第1のカメラの視野内に入り、穴h3が第2のカメラの視野内に入るようにキャリブレーション用ワークを配置して、穴h1、h2、h3のカメラ座標値を求め、カメラ座標値からロボット座標値への変換が平行移動と回転の組合せであるという考えに基づく所定の変換式により穴h1、h2のロボット座標値を求め、穴h1、h2、h3の位置関係と穴h1、h2のロボット座標値とから、h3のロボット座標値を求め、さらに、キャリブレーション用ワークを少しずらして、同様な計算を行うことにより、第2のカメラのキャリブレーションを行うというものが知られている(特許文献1参照)。
【0008】
また、目盛り付きのマーク板が視覚認識範囲内に入ったことを条件にその視覚認識処理を開始させるとともに、画像の取り込みタイミングに合わせてコンベア搬送による移動量を計測する一方で、マーク板がロボットの動作範囲の第1の位置にあるときに手先にポインタとなるピンを把持したロボットで、ピンに接するマーク板の所定の目盛り位置の座標を取得し、マーク板がロボットの動作範囲の第2の位置にあるとき、第1の位置からの移動距離(ΔConv)と、同様に読み取った目盛り位置の各座標成分(x、y、z)の変化量とに基いて、座標変換のパラメータQ、R、Sを求めるようにしたものも知られている(例えば、特許文献2参照)。
【先行技術文献】
【特許文献】
【0009】
特開昭62-214403号公報
特開平6-238584号公報
【発明の概要】
【発明が解決しようとする課題】
【0010】
しかしながら、上述のようなコンベアトラッキングをX線検査システムに適用し、座標出力機能を持ったX線検査装置とコンベアトラッキング機能を持ったロボットを備えたX線検査システムとして構成される場合では、物品ごとにその物品を基準にしたX線画像の座標をロボットの座標系に対応させる位置合わせができない場合があるためにX線画像の座標をコンベアトラッキングに有効活用することができなかった。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
アンリツ株式会社
検査装置
1日前
アンリツ株式会社
検査装置
1日前
アンリツ株式会社
パターン発生装置およびパターン発生方法と誤り率測定装置および誤り率測定方法
1日前
株式会社スズ建
自走式ふるい選別装置
2か月前
近江度量衡株式会社
青果物の選別装置
24日前
川崎重工業株式会社
廃棄物処理システム
5日前
川崎重工業株式会社
廃棄物処理システム
5日前
株式会社パウレック
粉粒体の検査選別装置
2か月前
株式会社パウレック
粉粒体の検査選別装置
2か月前
セキ工業株式会社
部品分別装置
1日前
株式会社イシダ
物品振分判定装置
2か月前
株式会社アーステクニカ
分配機、分配選別設備及び分配方法
2か月前
新東工業株式会社
分級装置及び粉塵固化システム
19日前
ヤンマーホールディングス株式会社
選別装置
29日前
ヤンマーホールディングス株式会社
選別装置
1か月前
株式会社村田製作所
気体噴出装置、及び電子部品の選別装置
1か月前
株式会社日本選別化工
小型家電ごみの処理装置
2か月前
株式会社日立ハイテク
分級装置、及びそれを用いた粉体の分級方法
29日前
株式会社サタケ
光学式選別機
1か月前
シーエスジャパン株式会社
パレット搬送装置及びパレット搬送システム
1か月前
不二パウダル株式会社
網固定具
18日前
株式会社日立ハイテク
粉体処理装置、およびそれを用いた粉体処理方法
29日前
アンリツ株式会社
物品検査システム
1か月前
キヤノン株式会社
分級結果予測方法、粒子の製造方法、分級結果予測装置および分級システム
26日前
日新化成株式会社
粉粒体中の異物の検査・排出装置
22日前
株式会社FUJI
廃材処理システム
23日前
株式会社ナベル
卵処理装置、卵処理装置の制御プログラム、及び、卵処理装置の制御方法
2か月前
シーエスジャパン株式会社
パレット搬送装置及びパレット搬送システム
1か月前
株式会社ダウォン産業
エアパルスを利用して廃棄物にくっ付いた夾雑物を分離及び除去する選別コンベヤ
2か月前
ネッツシュ-ファインマールテヒニック ゲーエムベーハー
摩耗防止用のハイブリッド分離器ホイールベーンを備える分離器ホイール
1か月前
ミネベア インテック アーヘン ゲーエムベーハー ウント ツェーオー カーゲー
搬送流から金属物を取り除くための装置ならびに方法
2か月前
日立Astemo株式会社
車載画像処理装置
3か月前
ノヴォ ノルディスク アー/エス
二重特異性抗体
1か月前
日本放送協会
有機エレクトロルミネッセンス素子、表示装置、及び照明装置
9日前
アイバイオ, インク.
操作されたCD25ポリペプチドおよびその使用
2か月前
武田薬品工業株式会社
血漿カリクレイン結合タンパク質
1か月前
他の特許を見る


 特許ウォッチ
特許ウォッチ